Clear Sky Science · fr
Traversabilité probabiliste profonde avec adaptation au test pour la navigation des rovers planétaires consciente de l'incertitude
Pourquoi une conduite plus sûre des rovers est importante
Lorsque nous envoyons des robots à roues sur la Lune ou Mars, ils doivent traverser des sables, des roches et des pentes sans aide humaine. Une seule mauvaise estimation de la douceur du sol peut laisser un rover valant des milliards coincé à jamais, comme cela est arrivé lorsque le rover Opportunity de la NASA a été immobilisé pendant des semaines dans du sable ondulé. Cette étude présente une nouvelle méthode permettant aux rovers de « sentir » le risque du sol devant eux, de choisir des trajectoires plus sûres et même d’apprendre de leurs erreurs pendant qu’ils roulent.
Le sol meuble comme danger caché
Sur d’autres mondes, les obstacles les plus dangereux ne sont pas toujours des rochers ou des falaises visibles par les caméras, mais des nappes de sol meuble qui semblent lisses. Quand les roues du rover patinent sur ce type de terrain, le véhicule glisse, avance beaucoup plus lentement que commandé, gaspille de l’énergie et peut devenir définitivement immobilisé. Les systèmes de navigation traditionnels se concentrent surtout sur les dangers géométriques visibles — ce qui ressemble à un obstacle et ce qui n’en est pas — sans pleinement capturer le comportement du sol sous les roues. En parallèle, les méthodes d’apprentissage automatique qui cherchent à prédire le patinage des roues à partir d’images et de cartes 3D peuvent se tromper dans des conditions inédites, comme un éclairage nouveau ou des pentes plus raides, et elles n’indiquent généralement pas à quel point leurs prédictions sont incertaines.
Apprendre au rover à raisonner sur le risque
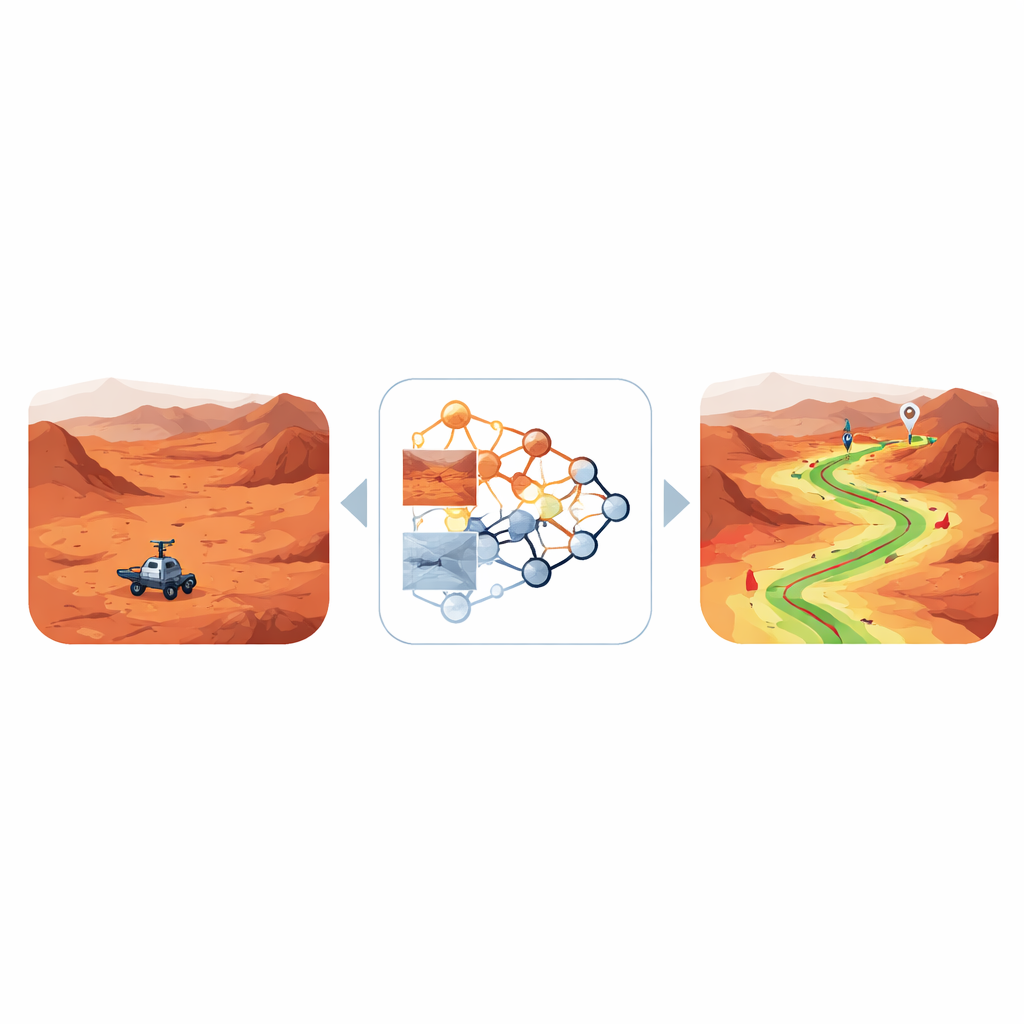
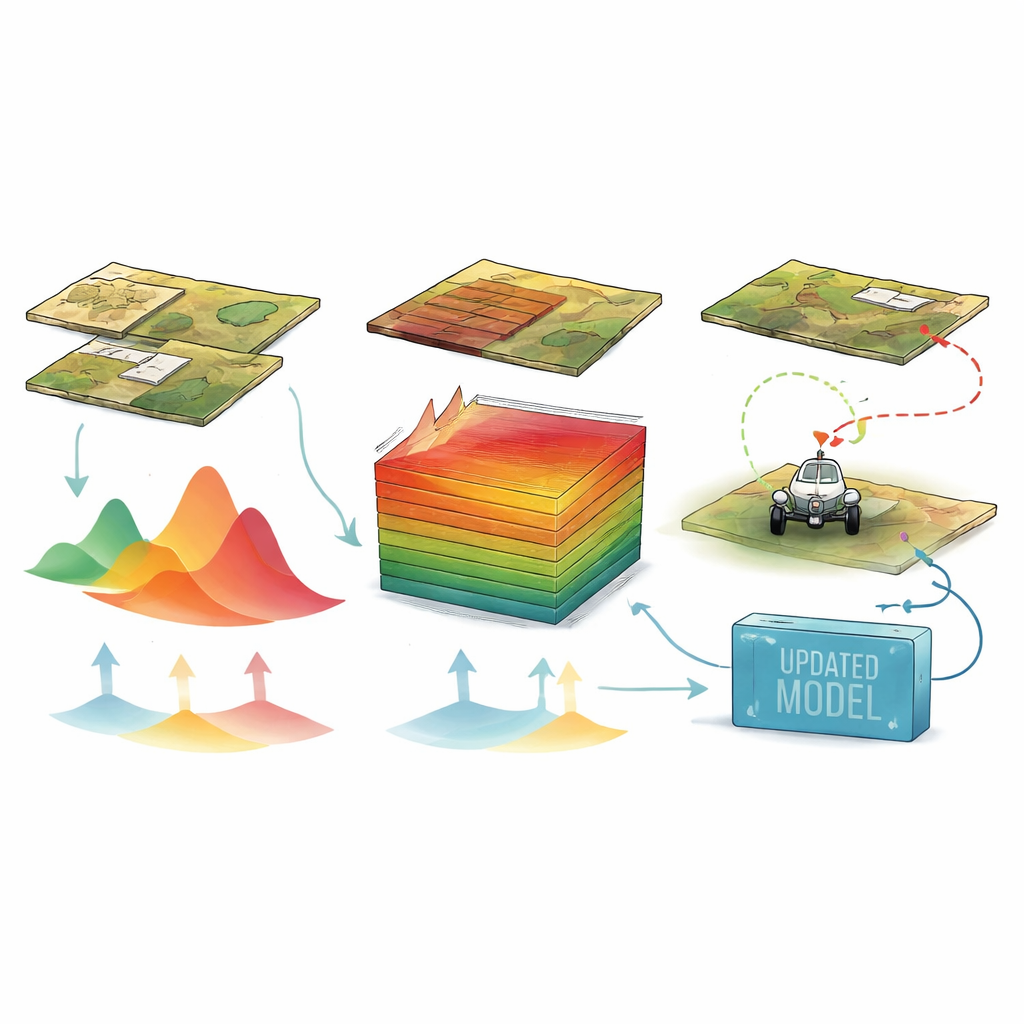
Les auteurs proposent un cadre intégré d’apprentissage et de planification qu’ils appellent traversabilité probabiliste profonde. Plutôt que de produire une unique « meilleure estimation » du patinage des roues sur chaque zone de terrain, leur modèle prédit une distribution de probabilité complète des glissements possibles, à partir d’images couleur et de la pente locale. Un ensemble de réseaux neuronaux profonds observe le paysage depuis le dessus et, pour chaque mouvement possible sur une grille, fournit à la fois une valeur de patinage attendue et son incertitude. À partir de cette distribution, le système traduit le patinage en une vitesse de déplacement effective et, finalement, en un coût de temps de trajet pour chaque pas. Les zones où le rover risque fortement de s’enliser reçoivent des coûts très élevés ; les zones où la prédiction est favorable et confiante reçoivent de faibles coûts. Un algorithme de recherche de chemin standard trouve alors une route qui équilibre distance courte et faible risque d’immobilisation.
Laisser le rover apprendre en roulant
Un défi majeur en exploration planétaire est que les conditions rencontrées à l’arrivée peuvent différer sensiblement des données d’entraînement : les pentes peuvent être plus raides, les propriétés du sol inconnues, ou l’éclairage très différent. Pour y faire face, le cadre inclut un mécanisme d’adaptation au moment du test. Au fur et à mesure que le rover roule, il mesure le patinage réel qu’il subit. Après chaque court déplacement, ces nouvelles mesures sont utilisées pour ajuster légèrement des couches supplémentaires de « mise à l’échelle et de décalage » dans les réseaux neuronaux tout en gardant les poids originaux fixes. Cette stratégie permet au modèle de s’adapter rapidement à de nouveaux terrains en utilisant seulement quelques observations, tout en préservant ce qu’il a déjà appris sur des conditions précédemment vues. Les prédictions mises à jour alimentent ensuite la replanification, de sorte que le chemin choisi peut s’améliorer en temps réel.
Soumettre le système à des tests rigoureux
Parce que les données réelles de rovers couvrent seulement des types de terrain limités, l’équipe a construit un large jeu de données synthétique de paysages de type martien. Ils ont combiné une topographie rugueuse générée par ordinateur avec dix classes de terrain cachées, chacune ayant sa propre couleur et son comportement de glissement, et ont fait varier à la fois la raideur des pentes et la direction de l’éclairage pour créer des scénarios familiers et inédits. Dans des milliers de missions simulées, la nouvelle méthode a été comparée à deux planificateurs de pointe qui ignorent soit l’incertitude, soit l’utilisent de manière moins directe. Dans des conditions familières, toutes les approches ont des performances similaires. Mais dans les cas les plus difficiles — éclairage faible et terrains ressemblant à des cratères aux pentes raides — l’approche de traversabilité probabiliste profonde a obtenu des taux de succès plus élevés et un glissement maximal plus faible, tout en conservant des temps de trajet compétitifs. Lorsque l’adaptation en cours de route était activée, le système réduisait encore les erreurs de prédiction et améliorait la sécurité, en particulier dans des environnements très différents de l’entraînement.
Ce que cela signifie pour les missions futures
Pour un lecteur non spécialiste, le message principal est que ce travail donne aux rovers planétaires une manière plus prudente et plus consciente d’eux‑mêmes de conduire sur des sols traîtres. Plutôt que de faire aveuglément confiance à une seule prédiction sur l’adhérence de leurs roues, les rovers peuvent désormais peser à la fois le comportement attendu et l’incertitude, choisissant des routes rapides mais peu susceptibles de les laisser bloqués. En apprenant en continu de leur propre expérience de glissement, ils peuvent s’adapter à des sables nouveaux, des pentes et des éclairages différents sans intervention humaine. À mesure que les agences spatiales planifient des missions de surface plus longues et plus ambitieuses, une telle navigation consciente de l’incertitude pourrait aider à garantir que ces précieux robots passent plus de temps à explorer de nouvelles cibles scientifiques et moins de temps à se dégager de situations difficiles.
Citation: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
Mots-clés: navigation de rovers planétaires, traversabilité du terrain, planification consciente de l'incertitude, apprentissage automatique robotique, exploration autonome