Clear Sky Science · fr
InFoRM : un modèle unifié inverse et direct pour le contrôle sensori-moteur
Comment le cerveau pourrait simplifier le mouvement
Chaque fois que vous attrapez une tasse ou frappez un clavier, votre cerveau doit transformer une intention (« déplacer ma main là-bas ») en une activité musculaire précise tout en prédisant ce que ce mouvement va ressentir. Les théories classiques supposent que le cerveau utilise deux calculateurs internes distincts pour cette tâche : l’un pour générer les commandes vers les muscles et l’autre pour prédire les sensations entrantes. Cette étude explore une alternative audacieuse : qu’un seul circuit unifié puisse gérer les deux volets du problème — économisant de l’énergie et améliorant les performances.
Deux façons de concevoir le contrôle
Les modèles traditionnels du contrôle du mouvement imaginent un système scindé. Une partie « inverse » convertit un résultat désiré (par exemple la trajectoire du bout des doigts dans l’espace) en activations musculaires nécessaires, tandis qu’une partie « directe » prédit comment le corps va bouger et quelles rétroactions sensorielles en découleront. Ces deux pièces sont souvent représentées comme des boîtes distinctes dans les manuels. Pourtant, l’imagerie cérébrale et les données de lésions ne soutiennent pas clairement une séparation aussi nette, et certaines régions cérébrales semblent impliquées dans les deux rôles. De plus, maintenir deux circuits complexes peut être coûteux sur le plan métabolique. Les auteurs se demandent donc si un réseau flexible unique pourrait apprendre à produire des commandes motrices, prédire les rétroactions sensorielles et même inférer l’objectif d’origine à partir des signaux internes seuls.
Un seul réseau qui fait tout
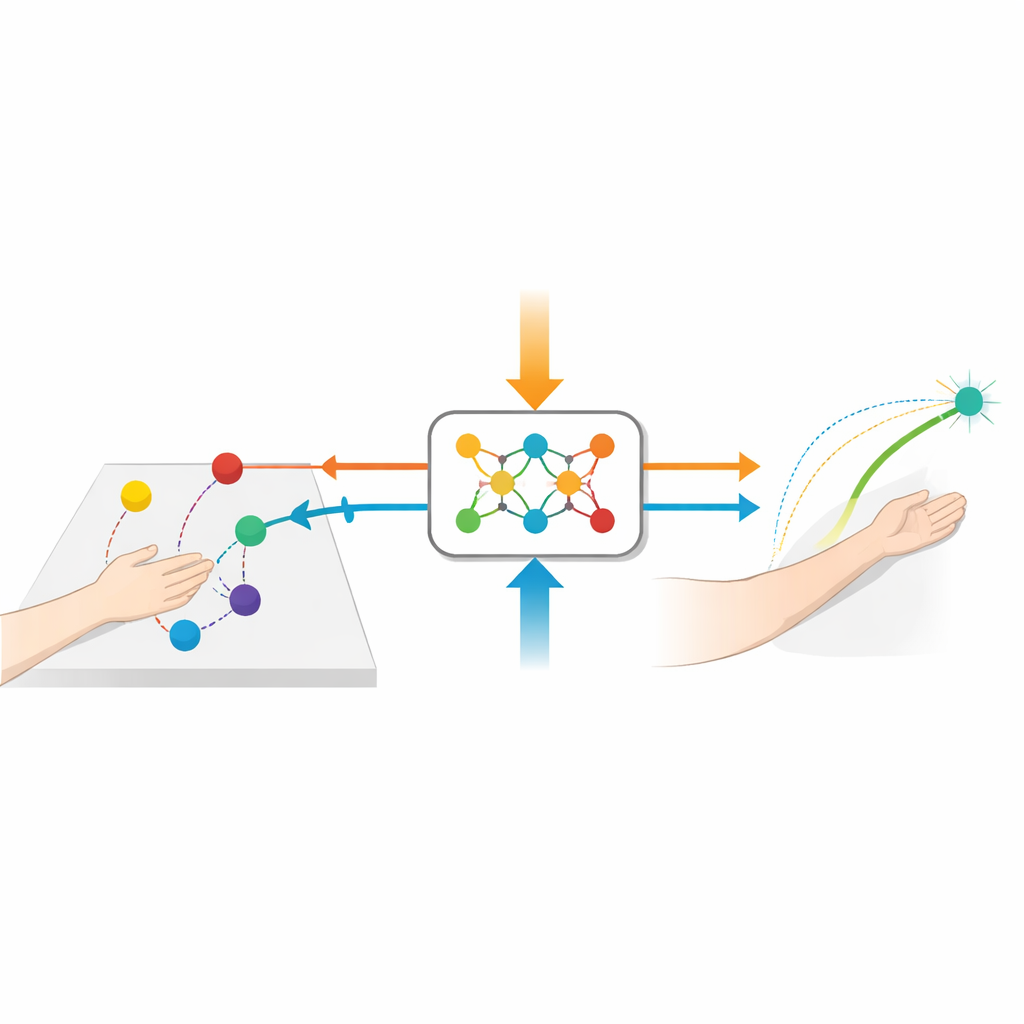
Pour tester cette idée, les chercheurs ont construit un modèle computationnel nommé InFoRM (pour inverse–forward–recognition model). Au lieu de deux modules empilés, InFoRM utilise un seul réseau neuronal récurrent — un réseau d’unités interconnectées — dans lequel confluent les signaux d’objectif, musculaires et sensoriels. À partir de ce « réservoir » commun d’activité, trois lectures de sortie sont entraînées en parallèle : l’une reconstruit la trajectoire souhaitée de la main, l’une génère les activations musculaires nécessaires pour l’atteindre, et l’une prédit les signaux sensoriels (longueur et vitesse musculaires) qui en résulteraient. De manière cruciale, les mêmes dynamiques internes soutiennent les trois tâches simultanément, de sorte que le modèle peut partager l’information entre elles plutôt que d’apprendre chacune isolément.
Mettre le modèle à l’épreuve du monde réel
L’équipe a enregistré de vrais mouvements de bras chez des volontaires qui atteignaient rythmiquement depuis un point central vers des cibles disposées dans différentes directions et distances sur une table. Les données de capture de mouvement et un modèle musculo-squelettique détaillé ont fourni, pour chaque mouvement, la trajectoire du bout des doigts, les activations musculaires estimées et les signaux de type sensoriel provenant des muscles. InFoRM a été entraîné sur un sous-ensemble de directions puis testé sur plusieurs scénarios exigeants : répéter des mouvements appris, produire des mouvements dans de nouvelles directions intermédiaires (« morphing » entre ce qu’il avait vu) et gérer des transitions naturelles choisies librement entre les cibles. Pour comparaison, les auteurs ont aussi construit des architectures de contrôle plus classiques avec des réseaux inverse et direct séparés, ainsi que des variantes enrichies auxquelles on fournissait des informations d’entrée supplémentaires.

Prédictions plus précises avec moins de ressources
Dans tous les tests, le réseau unifié InFoRM a reproduit les mouvements enregistrés et les signaux musculaires plus fidèlement que n’importe laquelle des architectures séparées. Ses sorties suivaient les signaux réels de plus près et avec des erreurs plus faibles, même lorsqu’on lui demandait d’interpoler vers des directions non entraînées ou de faire face à des séquences de cibles réalistes et non scriptées. Fait important, InFoRM atteignait cette précision supérieure en employant un nombre de neurones comparable voire moindre et en nécessitant beaucoup moins d’itérations d’entraînement, ce qui suggère une meilleure efficacité computationnelle. Le fait qu’il surpassait aussi le meilleur modèle de contrôle enrichi — celui qui disposait de la même combinaison d’informations d’objectif, motrices et sensorielles — indique que l’avantage provient de l’intégration de tout dans un même circuit récurrent, et non seulement d’entrées plus riches.
Ce que cela implique pour la compréhension du cerveau
Les résultats soutiennent l’idée que le cerveau ne maintiendrait peut-être pas des moteurs « directs » et « inverses » strictement séparés pour le mouvement. À la place, un seul circuit richement connecté pourrait contenir implicitement les deux, les commandes motrices et les prédictions émergeant des mêmes dynamiques sous-jacentes. Cette perspective s’accorde bien avec les vues modernes du cerveau comme machine prédictive, générant et mettant continuellement à jour des attentes sur son propre corps et sur le monde. Bien que le modèle reste une abstraction simplifiée et que des détails biologiques tels que les délais nerveux et la plasticité synaptique restent à explorer, InFoRM montre qu’un design unifié peut être à la fois puissant et économe, offrant une alternative convaincante pour la manière dont notre système nerveux pourrait contrôler le mouvement.
Citation: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Mots-clés: contrôle sensori-moteur, modèles internes, réseaux neuronaux, apprentissage moteur, traitement prédictif