Clear Sky Science · fr
Atténuation du bruit de mesure dans un prédicteur de Smith modifié et des régulateurs automatiques d’erreur pour système intégrateur avec retard mort
Pourquoi cela compte pour la technologie quotidienne
De nombreux dispositifs sur lesquels nous comptons — des usines chimiques et des réseaux électriques aux voitures et aux petits bancs d’essai — doivent réagir à des mesures de capteurs qui arrivent en retard et sont polluées par du bruit. Cet article pose une question simple mais cruciale : lorsque les signaux sont retardés et bruités, quel type de régulateur automatique maintient la stabilité, la précision et la douceur d’action sur l’équipement ? Les auteurs comparent une méthode populaire basée sur la prédiction à une approche plus récente qui estime et annule activement les perturbations, révélant pourquoi l’une est bien plus fiable dans le monde réel désordonné.
Réactions retardées et mesures instables
Dans de nombreux procédés, modifier une entrée (comme la puissance d’un chauffe‑élément ou la position d’une vanne) n’affecte pas immédiatement la sortie. Il existe un délai intégré pendant que la chaleur se propage, que les produits chimiques se mélangent ou que les organes mécaniques se déplacent. Les ingénieurs décrivent souvent ces systèmes comme un « intégrateur plus retard mort » : la sortie continue d’accumuler l’effet de l’entrée, mais seulement après une période d’attente. En parallèle, les capteurs mesurant la température, le débit ou la position contiennent toujours un certain bruit aléatoire. Un régulateur doit donc piloter un système dont la réponse est à la fois retardée et observée à travers une lentille instable. Si cela est mal géré, le signal de commande peut osciller fortement, user les actionneurs et ne pas atteindre la valeur cible.
Ancien prédicteur contre nouveau correcteur d’erreur
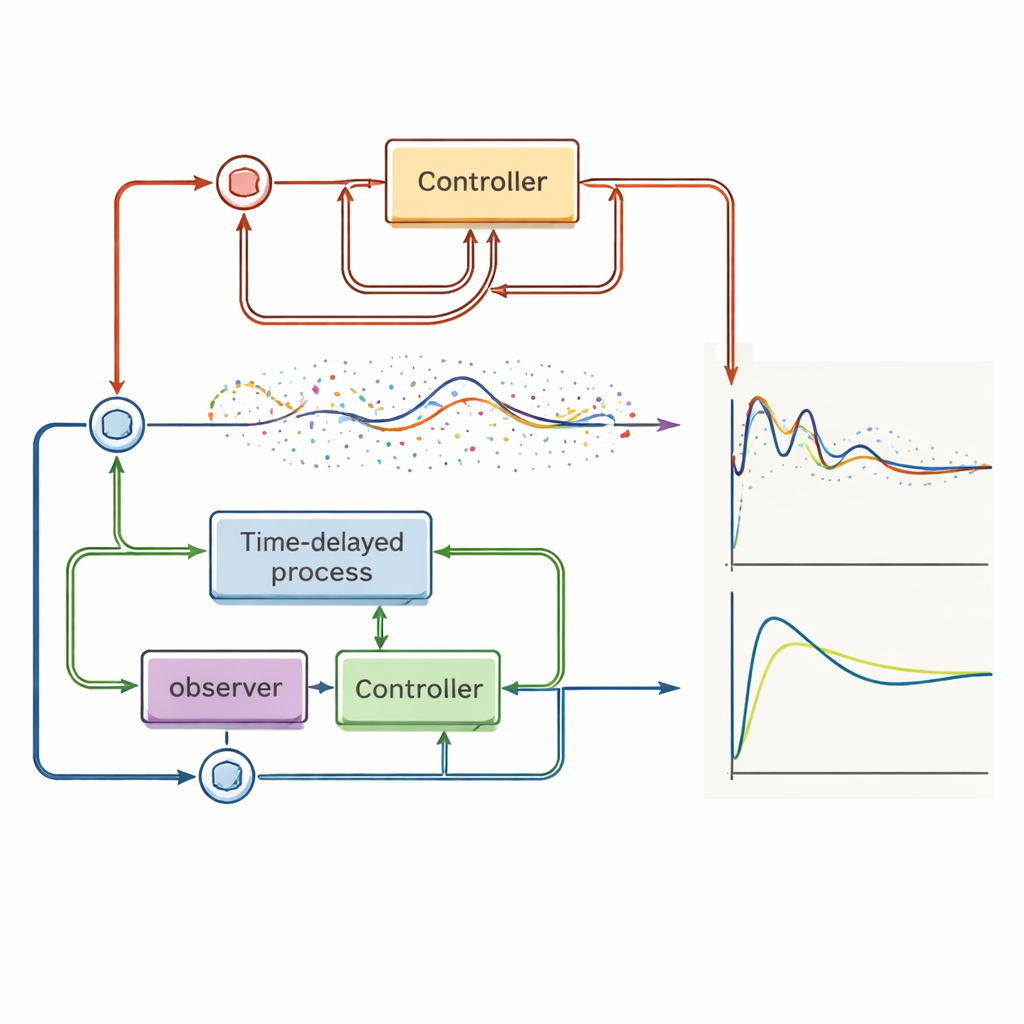
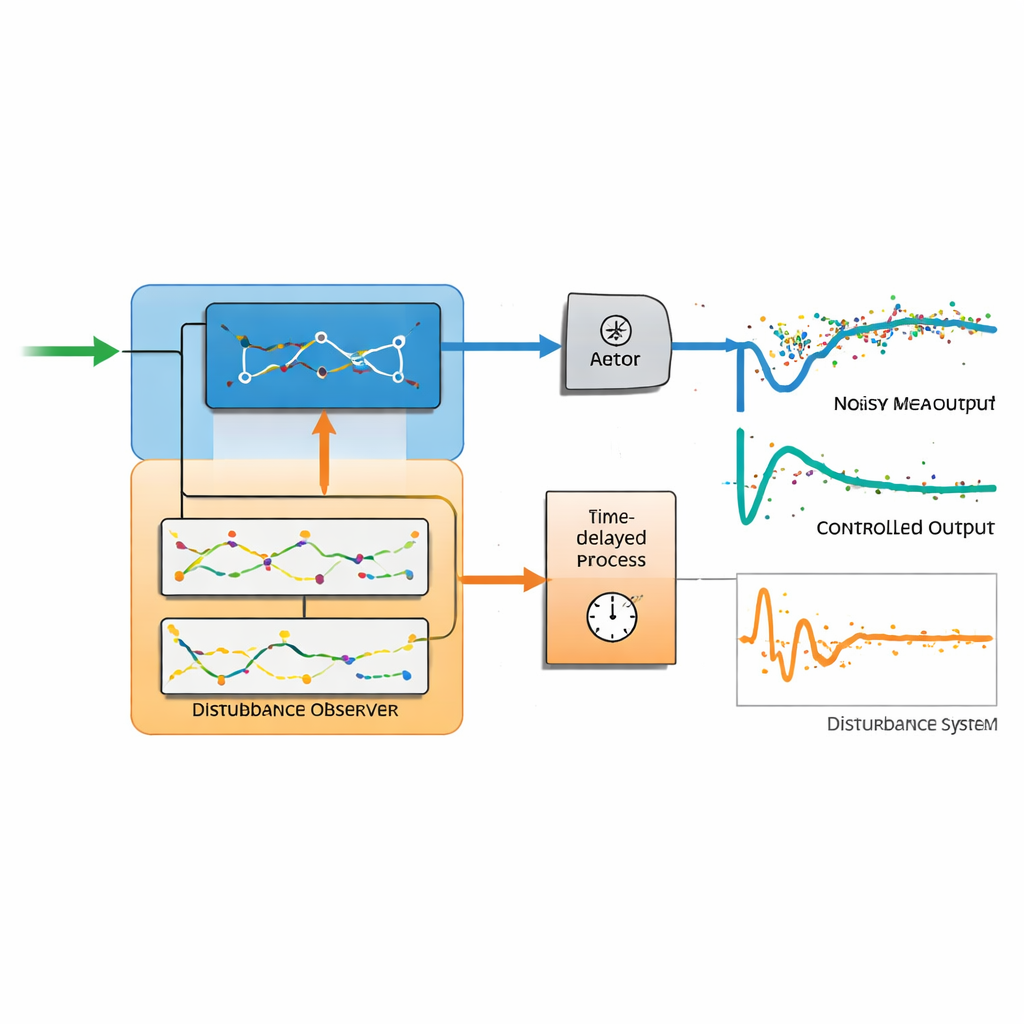
Le prédicteur de Smith classique et sa variante moderne, le prédicteur Åström–Smith, abordent le retard en construisant un modèle interne du procédé et en l’utilisant pour prédire la sortie future. Dans des conditions idéales, cela peut donner des réponses rapides et nettes. La conception concurrente étudiée ici, appelée régulateur automatique d’erreur, suit une autre voie. Elle combine un régulateur stabilisant ordinaire avec un observateur de perturbation — un module qui infère les perturbations cachées agissant sur l’entrée et les annule automatiquement. L’astuce clé est que cet observateur utilise un modèle interne complet du système retardé, ainsi que des filtres passe‑bas soigneusement conçus et, si nécessaire, des dérivées d’ordre supérieur de la sortie. Cette structure permet aux ingénieurs d’ajuster la rapidité de reconstruction des perturbations sans perturber la manière dont le système suit une consigne souhaitée.
Que se passe‑t‑il quand le bruit est réel, pas idéal
Lorsque les auteurs ajoutent un bruit de mesure réaliste dans les simulations et les expériences, la différence entre les deux approches devient flagrante. Le contrôleur fondé sur le prédicteur, qui repose sur plusieurs blocs intégrateurs marginalement stables, devient extrêmement sensible au bruit. Même pour des niveaux de bruit aussi faibles qu’environ un pour cent du signal, l’effort de commande explose — des centaines à des milliers de fois plus important que pour le régulateur automatique d’erreur — et le signal d’actionneur devient violemment instable. Pire encore, le prédicteur ne peut plus garantir que la sortie atteint finalement la consigne : des erreurs persistantes et même des instabilités apparaissent, notamment lorsque les actionneurs atteignent leurs limites de saturation. En revanche, le régulateur automatique d’erreur maintient des signaux de commande lisses, rejette efficacement les perturbations constantes et garde la sortie proche de la valeur cible, grâce à son filtrage et à sa structure d’estimation des perturbations.
Mise à l’épreuve pratique des méthodes
L’article ne s’arrête pas aux modèles abstraits. Les auteurs appliquent les deux régulateurs à un réacteur chimique instable approché par un modèle simple dominé par le retard, et à un montage thermique de laboratoire réel construit autour d’une lampe, d’un capteur de température et d’un ventilateur de refroidissement. Dans le cas instable, le régulateur automatique d’erreur fonctionne toujours de manière fiable, bien que son réglage doive être assoupli pour éviter les dépassements, tandis que la méthode basée sur le prédicteur subit des erreurs croissantes à mesure que le bruit s’intensifie. Sur la chaîne thermique, le régulateur automatique d’erreur produit des réponses quasi‑optimales en temps qui restent lisses tant en température qu’en effort de commande, même lorsque le ventilateur introduit des variations soudaines. Le régulateur à base de prédicteur, en revanche, montre des erreurs permanentes visibles et un comportement sensiblement plus lent et moins fiable lorsque le bruit réaliste et les limites des actionneurs sont présents.
Ce que cela implique pour les régulateurs futurs
Pour un lecteur non spécialiste, la conclusion est claire : un régulateur qui se contente de prédire l’avenir sur la base d’un modèle idéal peut paraître impressionnant sur le papier, mais peut mal se comporter dès que le bruit et les limites du monde réel apparaissent. Le régulateur automatique d’erreur, avec son observateur de perturbation intégré et son modèle interne filtré avec soin, se révèle plus robuste, plus précis et plus facile à régler sur une large gamme de procédés retardés. Les auteurs concluent que, bien qu’un prédicteur de Smith modifié puisse encore être utile dans des situations de niche à faible bruit, une conception basée sur un observateur de perturbation est un choix par défaut plus simple et plus fiable pour les systèmes de commande modernes où les capteurs sont imparfaits et où la stabilité est réellement importante.
Citation: Huba, M., Bistak, P. & Vrancic, D. Measurement noise attenuation in modified Smith predictor and automatic offset controllers for integrator plus dead-time system. Sci Rep 16, 8335 (2026). https://doi.org/10.1038/s41598-026-39732-9
Mots-clés: commande à retard, observateur de perturbation, bruit de mesure, régulateur automatique d’erreur, prédicteur de Smith