Clear Sky Science · fr
Calibration des paramètres de propriétés physiques et mécaniques des tiges de plants de brocoli
Pourquoi la manipulation douce des jeunes plantes est importante
L’agriculture industrielle repose de plus en plus sur des machines pour planter les cultures, mais les jeunes plants délicats en font souvent les frais. Pour le brocoli, des tiges meurtries ou écrasées lors du repiquage peuvent freiner la croissance, réduire le rendement, voire tuer la plante. Cette étude examine comment prédire et prévenir ces dommages en construisant un modèle numérique détaillé de la tige d’un plant de brocoli, permettant aux ingénieurs de tester des dispositifs de préhension sur écran avant qu’ils ne touchent une plante réelle. 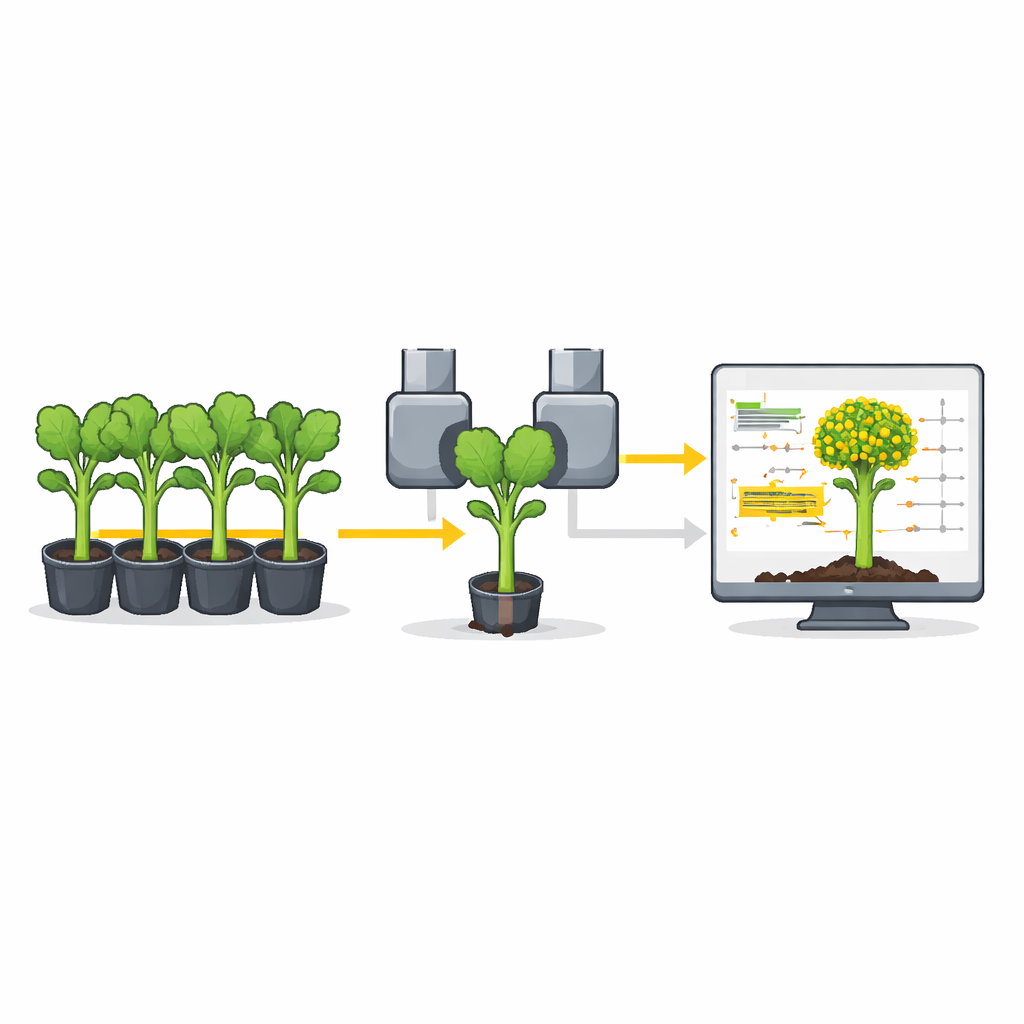
Tiges fragiles face au métal dur
Les plants de brocoli paraissent robustes, mais leurs tiges juteuses ressemblent davantage à des pailles molles qu’à des bâtons en bois. Quand des préhenseurs mécaniques saisissent ces tiges pour soulever et positionner les plants, une force insuffisante fait glisser la plante ; une force excessive écrase ou casse la tige. Pour mieux équilibrer cela, les chercheurs ont d’abord mesuré le comportement réel des tiges sous poussée, cisaillement, glissement et rebond. Ils ont testé des centaines de jeunes plants de brocoli « Yanxiu » cultivés sous température et humidité contrôlées, enregistrant soigneusement leur rigidité, densité, gonflement latéral, friction contre l’acier et la manière dont ils se déforment ou se rompent sous charge.
Transformer une tige en milliers de petites pièces
Plutôt que de traiter chaque tige comme une barre solide, l’équipe a utilisé la méthode des éléments discrets, une approche de simulation qui représente la matière comme une collection de nombreuses petites particules. Dans leur modèle informatique, chaque tige de brocoli est constituée d’environ 3 000 petites sphères liées entre elles, un peu comme une colonne de perles fortement collées. Ces liaisons confèrent de la résistance à la tige virtuelle, tandis que les règles de contact entre les sphères et avec les surfaces métalliques contrôlent leurs glissements, roulements et rebonds. En ajustant ces propriétés, la tige numérique peut se plier, se ciseler et se compresser presque comme l’originale.
Calibration de la tige virtuelle
Pour garantir que le modèle se comporte de manière réaliste, les auteurs ont utilisé un procédé de calibration étape par étape. D’abord, ils ont constitué de petits tas de segments de tige coupés et mesuré l’angle auquel le tas se stabilisait naturellement, un indicateur simple mais sensible de la friction entre les pièces. Ils ont ensuite réalisé des tests de tassage virtuels, ajustant les paramètres de friction et de rebond jusqu’à ce que le tas simulé corresponde au tas réel à environ un demi-degré près. Puis, ils se sont concentrés sur la résistance des liaisons internes en coupant des tiges avec un appareil d’essai mécanique et en mesurant la force maximale juste avant la rupture, puis en répétant la même action dans la simulation. À l’aide d’outils de planification expérimentale, ils ont recherché la combinaison de rigidité, de résistance et de taille des liaisons qui reproduisait la force moyenne de cisaillement observée d’environ 31 newtons avec moins de 1 % d’erreur. 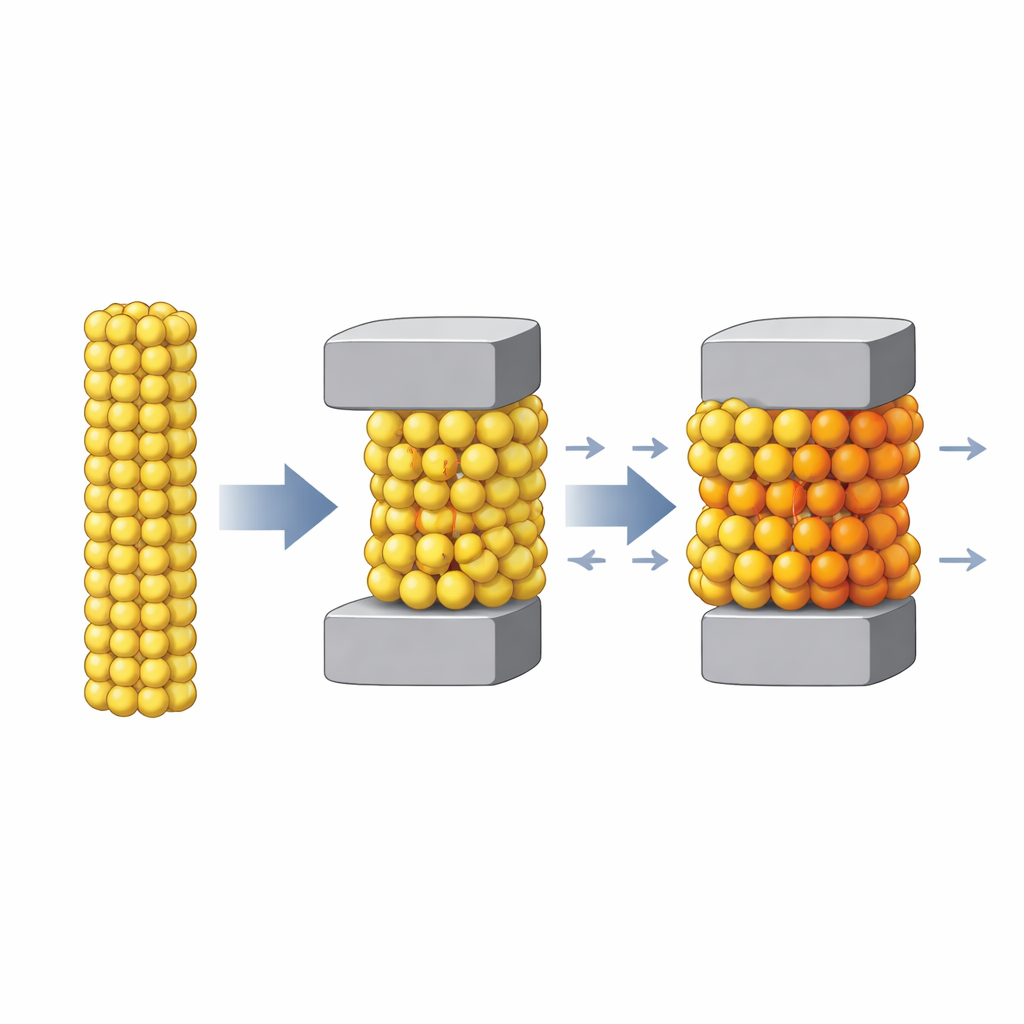
Mettre le modèle au service de la préhension
Avec la tige numérique ajustée, l’équipe a simulé ce qui se passe réellement dans une machine de repiquage : une paire de mors serre la tige et la maintient pendant quelques secondes. Ils ont comparé la déformation prédite par l’ordinateur avec des mesures réelles à trois niveaux de force pratiques — 10, 15 et 20 newtons. Les écarts sont restés inférieurs à environ 12 %, bien dans la plage communément acceptée pour les matériaux biologiques. Les simulations ont aussi visualisé comment la compression et les contraintes internes s’accumulent à mesure que la force augmente, mettant en évidence les situations où la tige est simplement pliée ou bien exposée à un risque de dommage permanent ou de rupture.
Ce que cela signifie pour des machines agricoles plus intelligentes
Pour les non-spécialistes, l’essentiel est que ce travail transforme les tiges fragiles de brocoli en un sujet d’essai numérique fiable. Les concepteurs de machines de repiquage peuvent désormais explorer des formes de mors, des matériaux de surface et des réglages de force dans un environnement virtuel, réduisant considérablement les essais-erreurs sur des plantes réelles. Le modèle calibré est adapté à la variété de brocoli spécifique, au niveau d’humidité, au diamètre de la tige et à la plage de forces testés, donc il doit être réajusté pour d’autres conditions. Même ainsi, la démarche générale — mesures soignées, modélisation par particules et optimisation statistique — offre une feuille de route pour protéger de nombreux types de jeunes plants fragiles à mesure que l’agriculture se tourne vers davantage d’automatisation.
Citation: Qin, L., Gong, Y., Zhang, K. et al. Calibration of physical and mechanical property parameters of broccoli seedling stalks. Sci Rep 16, 8008 (2026). https://doi.org/10.1038/s41598-026-39286-w
Mots-clés: plants de brocoli, repiquage mécanisé, mécanique des tiges végétales, modélisation par éléments discrets, robotique agricole