Clear Sky Science · fr
Contrôle direct prédictif séquentiel de la vitesse d’un PMSM
Un contrôle plus intelligent pour les moteurs électriques du quotidien
Les moteurs électriques entraînent discrètement les lignes d’usine, les pompes, les robots et même certains appareils ménagers. Les faire fonctionner de manière efficace et fluide permet d’économiser de l’énergie, de réduire le bruit et l’usure, et d’améliorer la fiabilité. Cet article explore une nouvelle façon de commander un type de moteur largement utilisé afin qu’il réagisse rapidement aux changements sans devenir instable ni générer un « bruit » électrique excessif. Les auteurs se concentrent sur une stratégie qui promet un réglage plus simple pour les ingénieurs tout en offrant un contrôle de la vitesse rapide et précis.
Pourquoi il est difficile d’ajuster les commandes actuelles
Les moteurs synchrones à aimants permanents sont très répandus car ils sont compacts, efficaces et capables d’un contrôle précis de la vitesse. Les schémas de commande traditionnels reposent sur plusieurs boucles imbriquées et une série de paramètres à régler par tâtonnements. Les approches récentes basées sur la commande prédictive tentent de choisir la meilleure action pour le moteur une fraction de seconde à l’avance, améliorant le temps de réaction et permettant de traiter plusieurs objectifs (comme une vitesse précise et une consommation de courant réduite) simultanément. Cependant, ces contrôleurs prédictifs combinent généralement tous les objectifs en une seule expression mathématique complexe dépendant de plusieurs « facteurs de pondération ». Choisir ces pondérations est notoirement difficile : un bon choix peut donner des performances excellentes, tandis qu’un mauvais peut rendre le système lent voire instable.
Une façon pas à pas de prendre des décisions
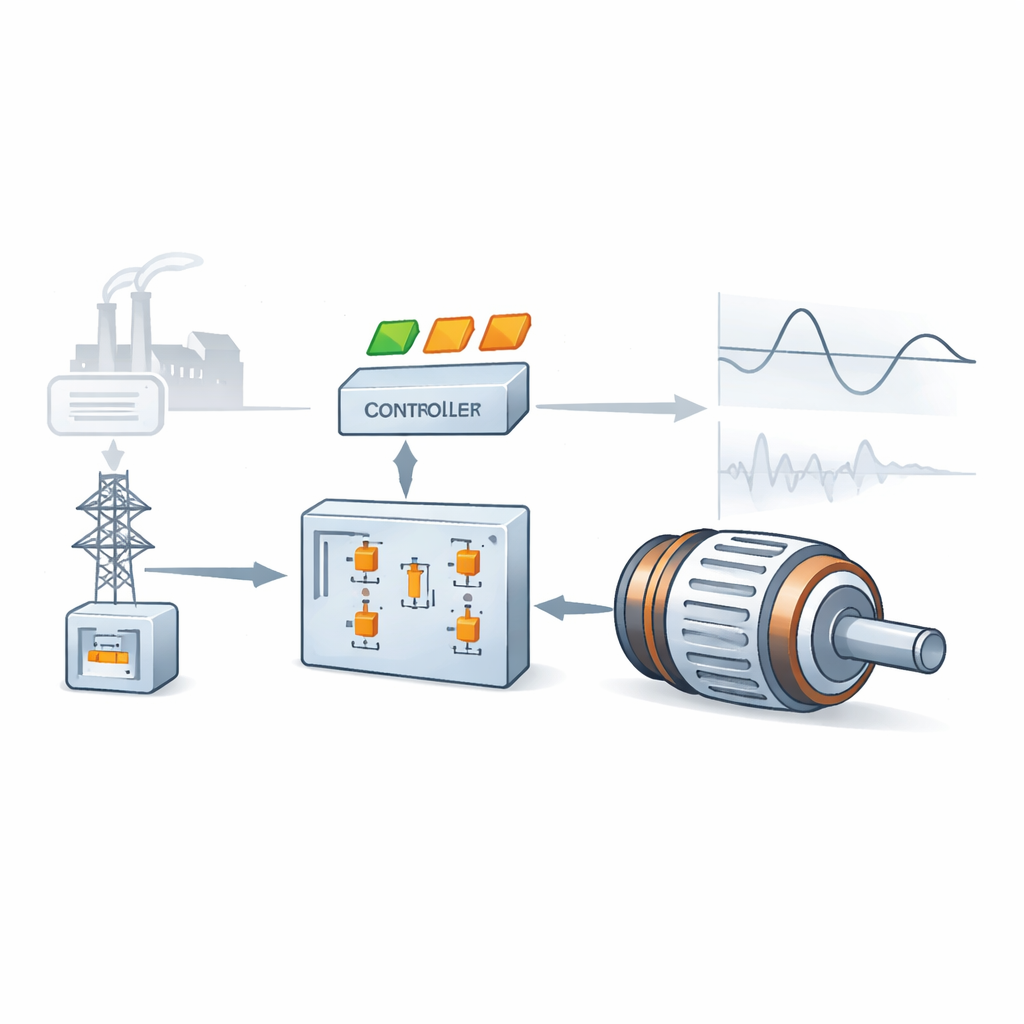
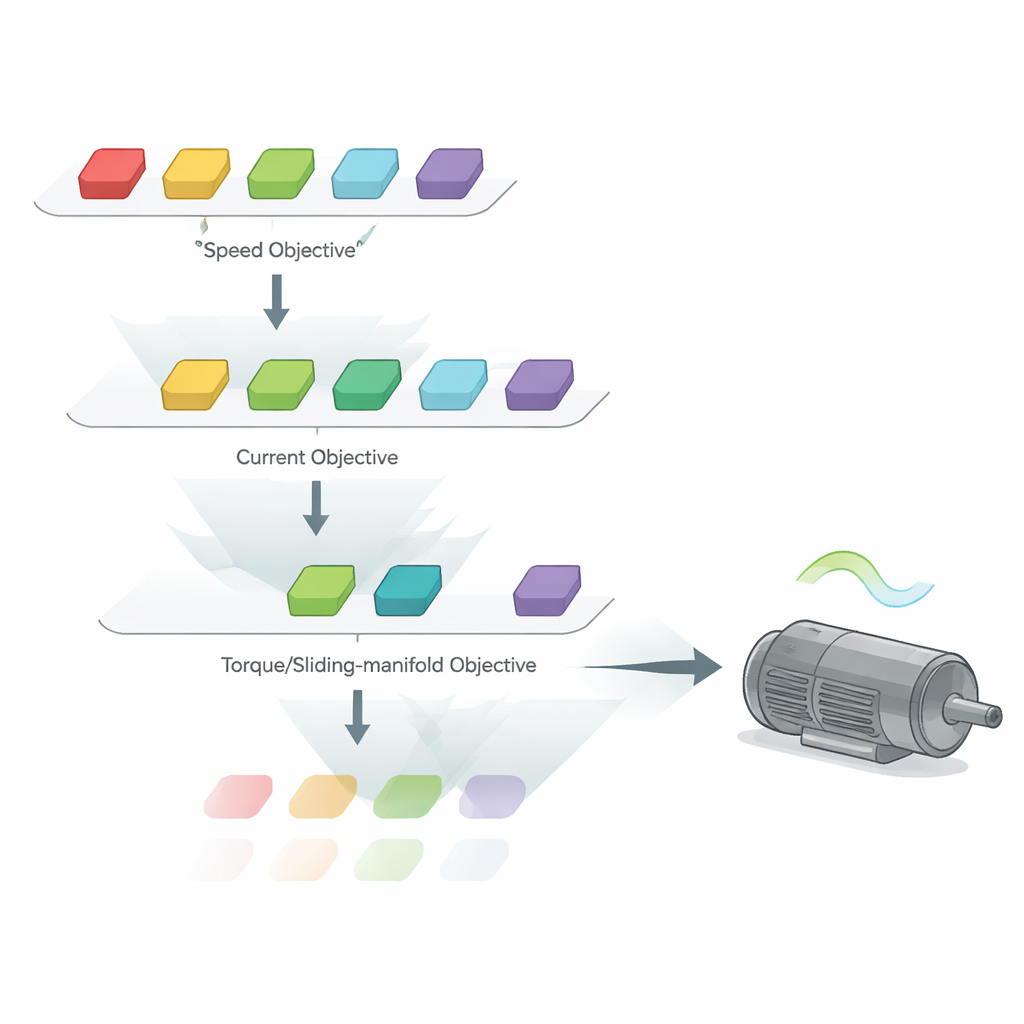
Plutôt que de rassembler tous les objectifs dans une formule compliquée, les auteurs étudient une approche « séquentielle ». Ici, le contrôleur prédit toujours le comportement du moteur pour chaque position d’interrupteur possible dans l’électronique de puissance, mais il évalue des objectifs séparés et plus simples les uns après les autres. D’abord, il élimine les options d’interrupteur qui conduiraient à un mauvais comportement de la vitesse. Puis, parmi les options restantes, il ne conserve que celles qui utilisent le courant de manière efficace. Enfin, il choisit l’option qui façonne le mieux le couple moteur, en utilisant une règle de glissement particulière qui relie l’erreur de vitesse et l’erreur de couple pour que la vitesse converge plus rapidement. Comme chaque étape se concentre sur un seul objectif, il n’est pas nécessaire de jongler avec plusieurs facteurs de pondération ; au lieu de cela, le contrôleur utilise un processus logique d’élimination. Un observateur compagnon estime le couple de charge inconnu à l’arbre afin que les prédictions restent précises même lorsque le moteur est perturbé.
Améliorer la stabilité par un design enrichi
Lorsque les auteurs ont testé pour la première fois cette méthode séquentielle, ils ont constaté que, bien qu’elle réagisse rapidement aux changements de vitesse, elle pouvait devenir instable et produire de fortes ondulations du courant moteur, surtout lorsqu’ils tentaient d’accentuer la réactivité. Pour corriger cela, ils ont proposé une version améliorée qui ajoute un subtil ajustement à la première étape de décision : elle n’examine pas seulement la vitesse prédite mais pénalise aussi légèrement certaines composantes du courant, et elle met cette pénalité à l’échelle de la vitesse demandée. À basse vitesse, le contrôleur se concentre davantage sur le maintien d’un courant stable ; à des vitesses plus élevées, il permet des actions plus fortes pour maintenir les performances. Ce changement rend possible l’utilisation d’une règle de glissement plus agressive pour le couple sans déclencher d’instabilité. Dans des simulations informatiques détaillées, la méthode améliorée a égalé le temps de montée d’un contrôleur prédictif conventionnel bien réglé et a produit des niveaux similaires de distorsion électrique, le tout avec moins de paramètres à ajuster.
Validation expérimentale en laboratoire
L’équipe a ensuite implémenté les contrôleurs séquentiels originel et amélioré sur un entraînement moteur réel de 1,1 kilowatt en utilisant une plate‑forme de prototypage rapide. Ils les ont comparés à un contrôleur prédictif standard dans des conditions réalistes, incluant des rampes de vitesse rapides, l’application soudaine de charges et même des inversions de sens. Le contrôleur séquentiel initial a pu réguler la vitesse mais a montré des pertes de stabilité occasionnelles et de fortes ondulations de courant, en particulier à haute vitesse. En revanche, la version améliorée a fonctionné de façon stable sur toute la plage testée. En ajustant un seul paramètre clé qui façonne la règle de glissement, les chercheurs ont pu arbitrer entre un suivi de vitesse plus serré et des formes d’onde de courant plus lisses. Des réglages intermédiaires ont offert un compromis pratique : les erreurs de vitesse étaient significativement réduites par rapport à des réglages conservateurs, tandis que l’augmentation de la distorsion du courant restait acceptable.
Ce que cela signifie pour les entraînements réels
Pour les non‑spécialistes, le message principal est que les auteurs ont démontré une façon plus simple mais néanmoins puissante de commander des moteurs électriques haute performance. Leur stratégie séquentielle améliorée réduit une grande partie des tâtonnements impliqués dans le réglage des contrôleurs prédictifs traditionnels, tout en préservant une réaction rapide aux changements de vitesse et aux perturbations. La méthode n’est pas parfaite — les formes d’onde de courant restent quelque peu plus bruyantes qu’idéal, surtout dans des réglages très exigeants — mais elle représente une avancée importante vers des variateurs plus robustes et plus faciles à mettre en service. Les travaux futurs porteront sur la réduction de ces distorsions de courant et l’analyse approfondie de la stabilité, dans le but de rendre ce type de commande séquentielle adapté à des systèmes industriels plus importants et plus strictement régulés.
Citation: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
Mots-clés: moteur synchrone à aimants permanents, commande prédictive, contrôle de la vitesse du moteur, commande séquentielle, variateurs d’électronique de puissance