Clear Sky Science · fr
Recherche sur une méthode de reconnaissance intelligente des pièces mécaniques à forte similitude de caractéristiques en environnement industriel
Pourquoi il est important d’identifier des pièces qui se ressemblent
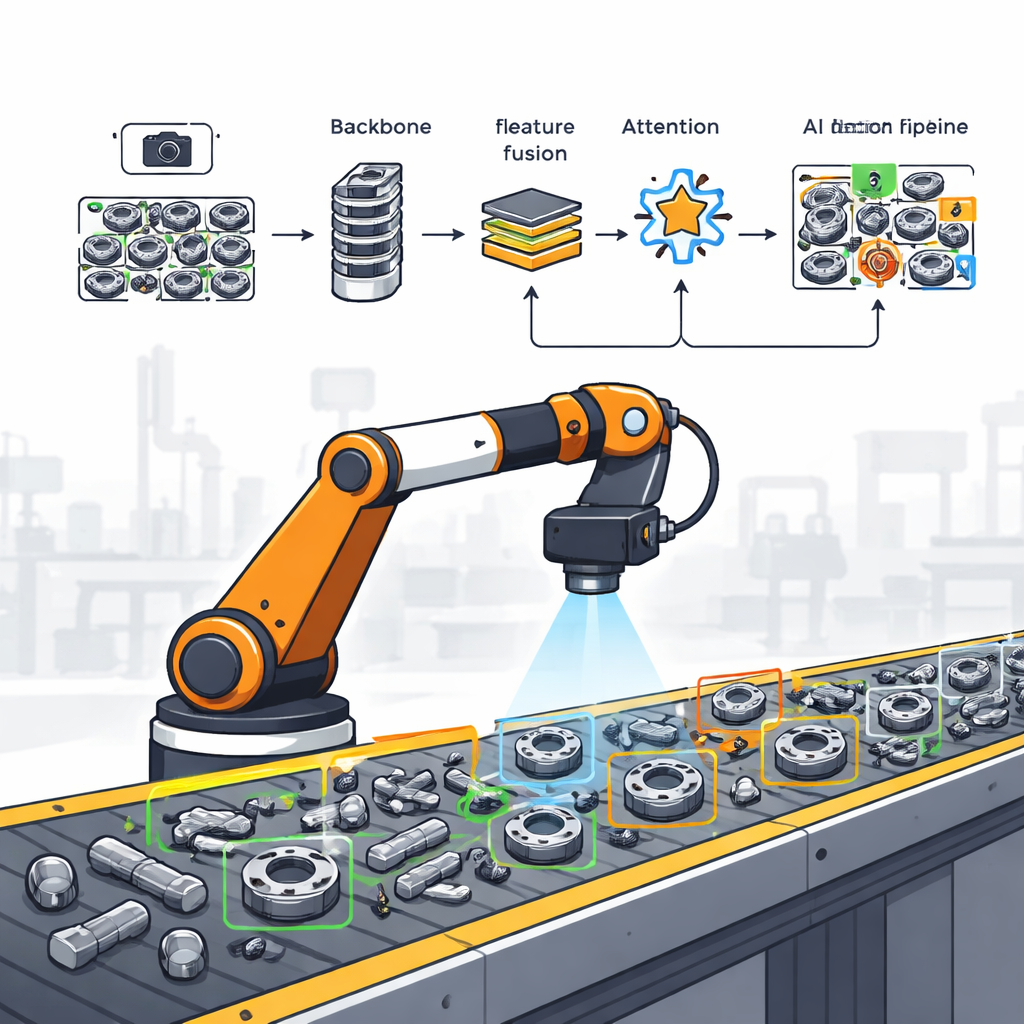
Les usines modernes dépendent de robots pour repérer, saisir et assembler des milliers de petites pièces métalliques. Beaucoup de ces éléments — engrenages, roulements, pignons, écrous et vis — se ressemblent de façon déroutante, notamment sous un éclairage difficile ou lorsqu’ils se chevauchent sur un convoyeur. Si un robot confond une pièce avec une autre, cela peut provoquer des bourrages, des défauts ou même endommager des machines. Cette étude s’attaque à une question apparemment simple mais aux grandes conséquences industrielles : comment un système de vision compact et rapide peut-il distinguer de façon fiable des pièces presque identiques dans des conditions réelles d’atelier ?
Les défis de la vision en contexte d’usine
Sur le plancher d’une usine, les caméras bénéficient rarement des vues propres utilisées dans les vidéos de démonstration. L’éclairage est inégal, provoquant de fortes réflexions sur le métal brillant et des ombres profondes ailleurs. Les pièces sont versées dans des bacs ou dispersées sur des bandes, se masquant souvent partiellement les unes les autres. Pire encore, de nombreux composants métalliques partagent des formes, couleurs et textures similaires, laissant très peu d’indices visuels évidents. Les logiciels traditionnels qui utilisent des modèles ou des descripteurs conçus manuellement peinent dans ces conditions : ils sont lents, fragiles face aux variations d’éclairage et échouent souvent quand les pièces se chevauchent ou sont pivotées de manière inattendue.
S’appuyer sur des détecteurs « one‑shot » rapides
Ces dernières années, une famille de modèles d’intelligence artificielle appelée YOLO (pour « You Only Look Once ») est devenue populaire pour détecter des objets en une seule passe rapide. YOLOv8, l’une des versions récentes, équilibre déjà bien précision et vitesse et peut fonctionner en temps réel. Toutefois, lorsque différentes pièces se ressemblent presque, même YOLOv8 peut manquer des indices subtils ou tracer des boîtes imprécises. Les tentatives antérieures de réduire la taille des modèles YOLO pour des appareils peu puissants ont souvent diminué le nombre de paramètres au prix d’une moins bonne représentation des détails fins, justement ce qui est nécessaire pour distinguer des pièces mécaniques quasi identiques.
Un réseau de détection plus léger mais plus net
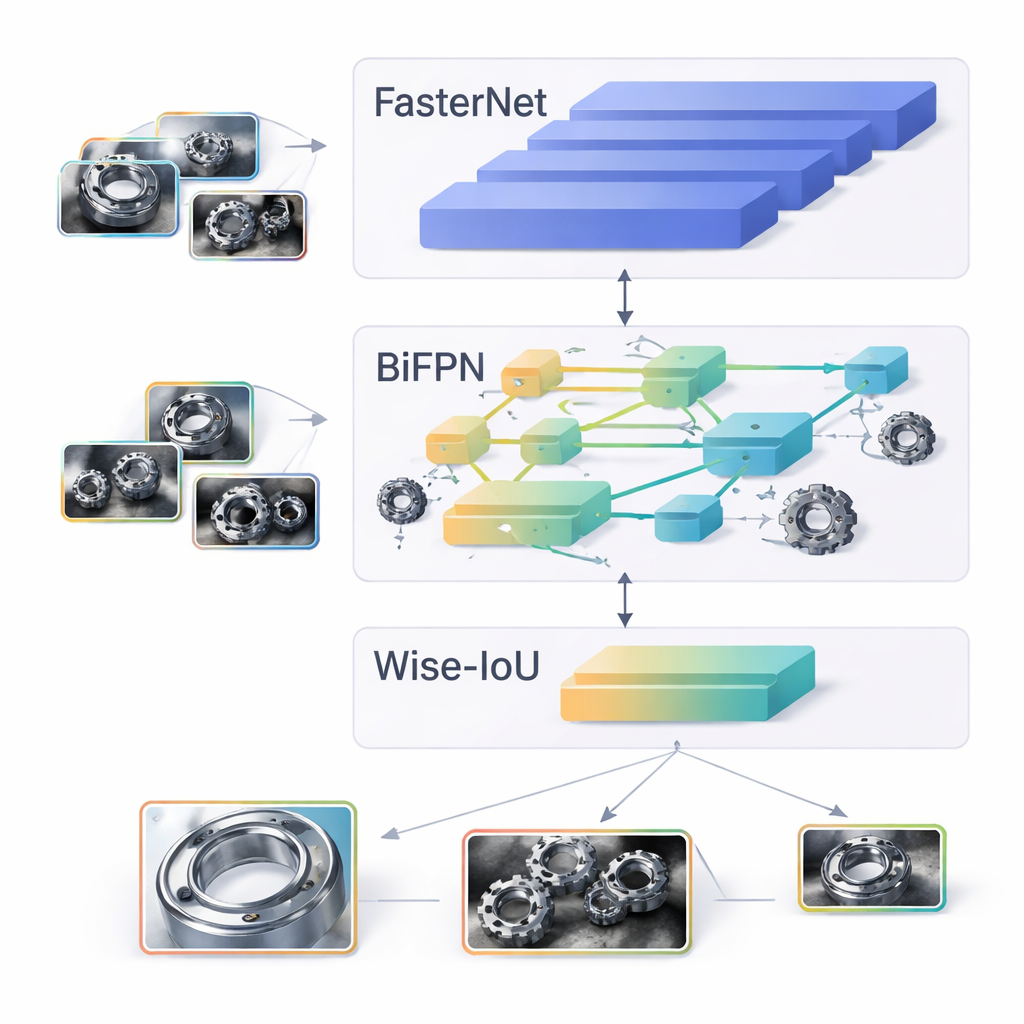
Les auteurs proposent une version améliorée du plus petit modèle YOLOv8, nommé YOLOv8n, spécialement adaptée aux pièces industrielles confuses et au matériel à ressources limitées. Premièrement, ils remplacent le noyau standard du réseau par une conception plus récente appelée FasterNet, qui utilise une astuce de convolution « partielle » pour ne travailler qu’au niveau des régions les plus utiles de l’image à chaque étape. Cela réduit les opérations redondantes en mémoire sans perdre les informations visuelles clés. Deuxièmement, ils reconfigurent la « gorge » centrale du réseau pour employer une pyramide de caractéristiques bidirectionnelle (BiFPN), permettant à l’information de circuler des vues grossières et globales vers les détails fins et inversement, de sorte que les petites pièces partiellement occultées profitent du contexte et que les détails fins bénéficient d’un apport global.
Apprendre au réseau à ignorer les mauvais indices
Au‑delà de l’architecture, la manière dont le réseau apprend ses réglages internes — guidée par une fonction de perte — influence fortement ce à quoi il prête attention. Les méthodes d’entraînement standard traitent tous les exemples plus ou moins de la même manière, ce qui fait que des boîtes d’entraînement de faible qualité (mal alignées ou ambiguës) peuvent induire le modèle en erreur. Les auteurs remplacent la règle habituelle d’appariement des boîtes par une méthode appelée Wise‑IoU. En termes simples, cette approche évalue chaque exemple d’entraînement non seulement par le recouvrement, mais aussi par son caractère d’« outlier », puis réduit discrètement l’influence de ces exemples peu fiables. Avec le temps, le système apprend surtout à partir d’exemples clairs et bien étiquetés, produisant des boîtes de détection plus serrées et plus fiables, en particulier quand les pièces se chevauchent ou apparaissent sous un éclairage difficile.
Mettre le système à l’épreuve
Pour évaluer leur conception, l’équipe a constitué sa propre collection d’images de six pièces mécaniques courantes, chacune capturée 1 250 fois sous différents niveaux d’éclairage et avec divers degrés de recouvrement mutuel. Ils ont comparé leur modèle amélioré au YOLOv8n standard et à plusieurs autres détecteurs légers. Le nouveau système a atteint une qualité de détection globale supérieure tout en utilisant moins des deux tiers de la puissance de calcul et en réduisant le nombre de paramètres d’environ 42 %. En particulier, il a augmenté un score clé appelé moyenne de précision (mAP) à un seuil couramment utilisé de 1,5 point de pourcentage, tout en restant suffisamment efficace pour une exécution en temps réel sur du matériel modeste.
Que cela signifie pour les usines intelligentes
En termes concrets, l’étude montre que les robots d’usine peuvent devenir à la fois plus intelligents et plus légers. Grâce au noyau de réseau repensé, à une fusion de caractéristiques plus intelligente et à une règle d’apprentissage plus sélective, un petit modèle d’IA peut distinguer de façon plus fiable des engrenages, roulements et autres pièces qui se ressemblent dans des scènes réelles désordonnées, même lorsque l’éclairage est mauvais et que les pièces se chevauchent. Cette combinaison d’une précision accrue et d’une charge de calcul réduite facilite le déploiement d’une vision robuste sur des appareils edge peu coûteux, ouvrant la voie à des lignes de production entièrement automatisées et plus flexibles sans nécessiter de serveurs massifs ni d’environnements parfaitement contrôlés.
Citation: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
Mots-clés: détection d'objets industriels, pièces mécaniques, apprentissage profond léger, YOLOv8, automatisation d'usine