Clear Sky Science · fr
Une stratégie de contrôle humanoïde basée sur l’apprentissage par renforcement profond pour un confort amélioré des robots de rééducation des membres inférieurs
Des robots qui aident les personnes à marcher à nouveau
Lorsqu’une personne a des difficultés à marcher après un AVC ou une lésion de la moelle épinière, la thérapie peut être lente, fatigante et inconfortable. Les robots de rééducation des membres inférieurs sont conçus pour soutenir et guider les jambes du patient pendant les séances, mais les machines d’aujourd’hui donnent souvent une impression de raideur et de « robotisation ». Cette étude explore comment doter ces robots d’un cerveau plus humain — en utilisant des algorithmes d’apprentissage avancés — peut rendre l’entraînement plus doux, plus naturel et, en fin de compte, plus efficace pour les patients.
Pourquoi la pratique de la marche doit sembler naturelle
Avec le vieillissement des populations, davantage de personnes vivent avec des troubles sérieux de la marche, et beaucoup se tournent vers la rééducation assistée par robot. Les robots traditionnels suivent des trajectoires de jambe préprogrammées et utilisent des règles de contrôle simples pour déplacer les articulations. Bien que fiables, ces méthodes peinent face à la réalité désordonnée du mouvement humain : la démarche de chacun est légèrement différente, et un robot rigide peut tirer ou pousser d’une manière qui paraît maladroite voire douloureuse. Les auteurs soutiennent que pour qu’une rééducation soit efficace, le robot doit non seulement maintenir le patient en position et en mouvement, mais aussi s’adapter aux motifs naturels de la marche et minimiser les forces qu’il exerce sur le corps.
Apprendre à partir de véritables pas humains
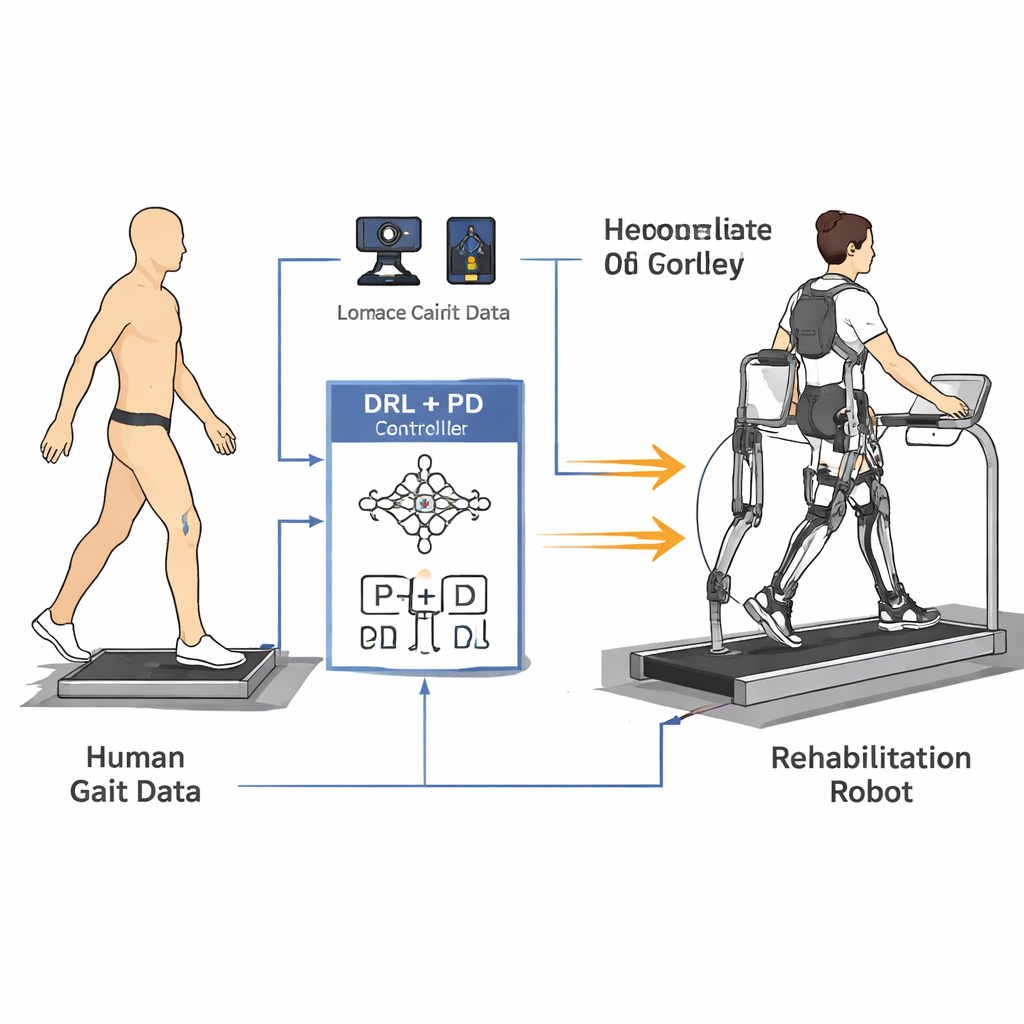
Pour apprendre au robot comment les personnes marchent réellement, les chercheurs ont d’abord construit un modèle mathématique simplifié des jambes et du tronc. Ils ont ensuite enregistré des données de marche auprès de cinq volontaires sains à l’aide d’un système de capture de mouvement 3D de haute précision et de plateformes de force au sol. Des marqueurs réfléchissants placés sur les hanches, les genoux, les chevilles et le tronc leur ont permis de calculer le mouvement de chaque articulation au cours d’un pas complet, tandis que des capteurs sous les pieds mesuraient la pression exercée par chaque jambe contre le sol. À partir de ces mesures, ils ont créé des courbes de référence lisses pour les angles de hanche et de genou et ont suivi l’évolution des forces articulaires dans le temps, capturant à la fois la forme et le rythme de la marche normale.
Un contrôleur plus intelligent qui reste prudent
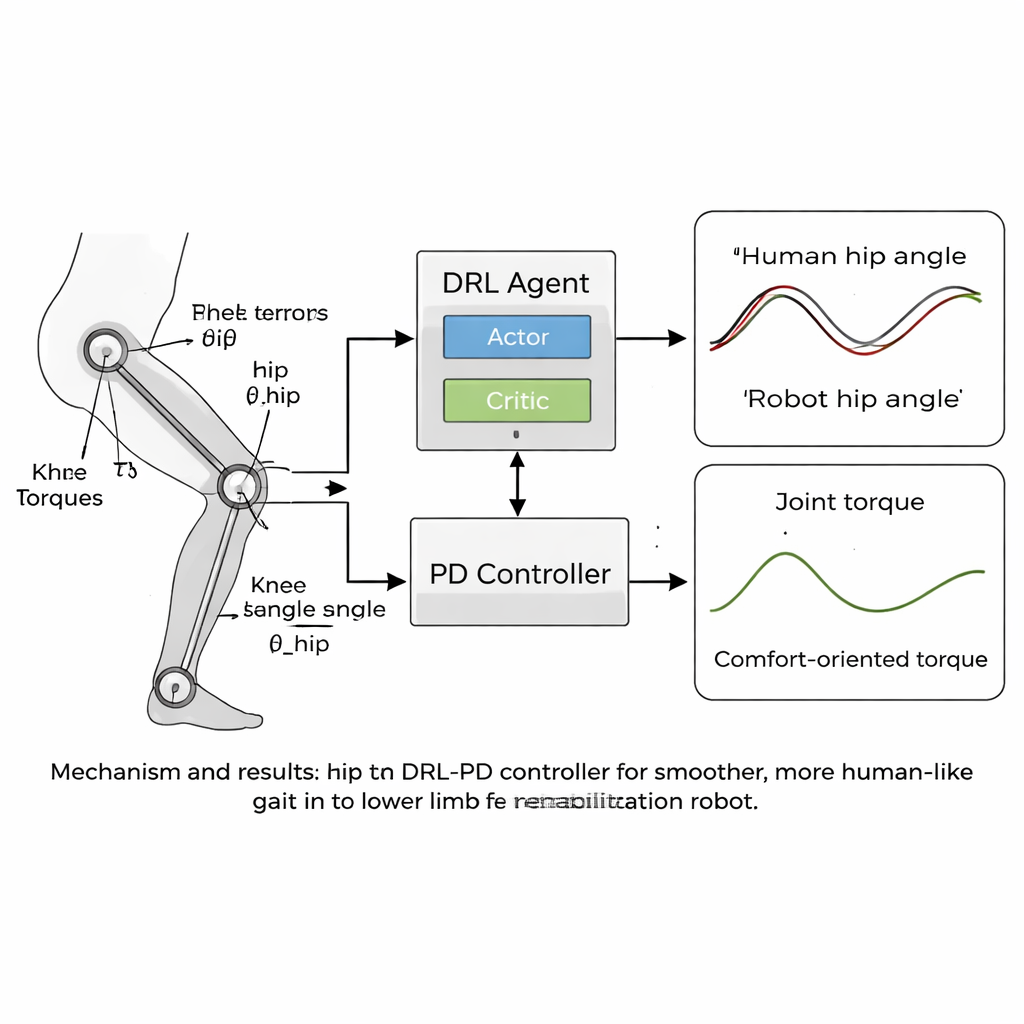
Le cœur de l’article est une nouvelle stratégie de contrôle « humanoïde » qui combine l’apprentissage par renforcement profond (DRL) avec un contrôleur classique proportionnel-dérivé (PD). Le DRL est un type d’intelligence artificielle où un agent virtuel essaie des actions, observe les résultats et découvre progressivement ce qui fonctionne le mieux en maximisant un signal de récompense. Dans ce cas, l’agent s’intercale au-dessus du contrôleur PD : il observe les angles et les vitesses des articulations du robot et décide quels couples appliquer, tandis que la couche PD veille à ce que les articulations ne s’écartent pas trop des angles cibles sûrs et proches du comportement humain. La fonction de récompense est soigneusement conçue pour favoriser une marche avant stable tout en pénalisant tout ce qui serait désagréable pour un patient — comme les mouvements saccadés, les forces importantes aux articulations ou des postures dangereuses telles qu’une inclinaison excessive ou une faible élévation du pied.
Mouvements plus fluides, plus proches d’une marche humaine
L’équipe a testé son approche en simulation informatique en utilisant un modèle de robot de rééducation des membres inférieurs avec des articulations de hanche et de genou correspondant à leurs données de marche. Au fil de milliers d’épisodes d’entraînement, le contrôleur DRL-PD a appris à produire un cycle de marche répétitif dans lequel les angles articulaires suivaient de près les modèles de référence humains. Les hanches et les genoux du robot se sont déplacés en boucles régulières et stables, signe d’une démarche fiable et reproductible. De façon cruciale, les couples nécessaires pour actionner les articulations sont devenus plus lisses et plus faibles comparés à un contrôleur PD standard. Les mesures quantitatives ont montré que les erreurs de suivi sont tombées à quelques centièmes de radian, et que le taux de variation des couples articulaires — un indicateur de la sensation de « saccade » pour le patient — a été réduit de plus de moitié. Le contrôleur est également resté stable lorsque les masses des jambes du modèle ont été modifiées de quelques pourcents, ce qui suggère qu’il pourrait tolérer des différences réelles entre les utilisateurs.
Ce que cela signifie pour les futurs robots de rééducation
Pour les non-spécialistes, le message est simple : en laissant un robot apprendre les rythmes et les limites de la marche humaine à partir de données réelles, et en le récompensant pour sa douceur et sa fluidité, on peut concevoir des machines qui aident les personnes à s’exercer à marcher d’une manière plus naturelle et moins stressante. Les patients pourraient être plus enclins à participer à des séances plus longues et plus fréquentes si le robot bouge avec eux plutôt que contre eux. Bien que les résultats actuels proviennent de simulations et nécessitent des ordinateurs puissants pour l’entraînement, une fois l’apprentissage achevé le contrôleur peut fonctionner efficacement sur des dispositifs réels. Les auteurs considèrent ce travail comme une étape vers des robots de rééducation personnalisés et adaptatifs qui s’ajustent à la démarche et aux besoins de confort de chaque patient, améliorant potentiellement à la fois la récupération et la qualité de vie.
Citation: Jin, Y., Zhang, J., Li, W. et al. A humanoid control strategy based on deep reinforcement learning for enhanced comfort in lower limb rehabilitation robots. Sci Rep 16, 7370 (2026). https://doi.org/10.1038/s41598-026-39011-7
Mots-clés: robots de rééducation, rééducation de la marche, apprentissage par renforcement profond, exosquelette, confort du patient