Clear Sky Science · fr
Stratégie de reconstruction des données de trajectoire des véhicules pour la reconnaissance vidéo basée sur une méthode en deux étapes d’interpolation et de filtrage
Pourquoi nettoyer les données de circulation numériques est crucial
Chaque fois qu’une caméra de circulation observe des véhicules traverser une intersection, elle génère un flux de données caché décrivant où va chaque véhicule, à quelle vitesse il se déplace et comment il accélère ou freine. Ces informations sont précieuses pour des routes plus sûres, des feux de circulation plus intelligents et les futures voitures autonomes. Mais en pratique, ces données sont bruitées : des voitures sont cachées derrière des camions, les phares éblouissent sous la pluie, et les systèmes de vision par ordinateur commettent des erreurs. Cette étude aborde une question très concrète : comment transformer ces données vidéo imparfaites en un enregistrement fiable des mouvements réels des véhicules ?
Quand les caméras interprètent mal les mouvements
Le suivi vidéo est attractif parce qu’il est peu coûteux, non intrusif et couvre de larges zones. Pourtant, la sortie brute comporte deux problèmes principaux. Le premier est fait d’erreurs manifestes, comme une voiture qui semble reculer brusquement, s’arrêter instantanément depuis une vitesse autoroutière, ou afficher des pics d’accélération impossibles. Ils proviennent généralement d’occlusions, de flou de mouvement ou d’une perte temporaire du suivi du véhicule par le logiciel. Le deuxième problème est le jitter aléatoire — de petites oscillations rapides de la position rapportée. Lorsque les vitesses et accélérations sont calculées à partir de ces positions, ces oscillations s’amplifient, faisant paraître une conduite normale comme erratique. Si ces problèmes ne sont pas corrigés, ils peuvent fausser les modèles de trafic de plus de 40 %, ce qui peut induire en erreur les études de sécurité et les systèmes de conduite automatisée.
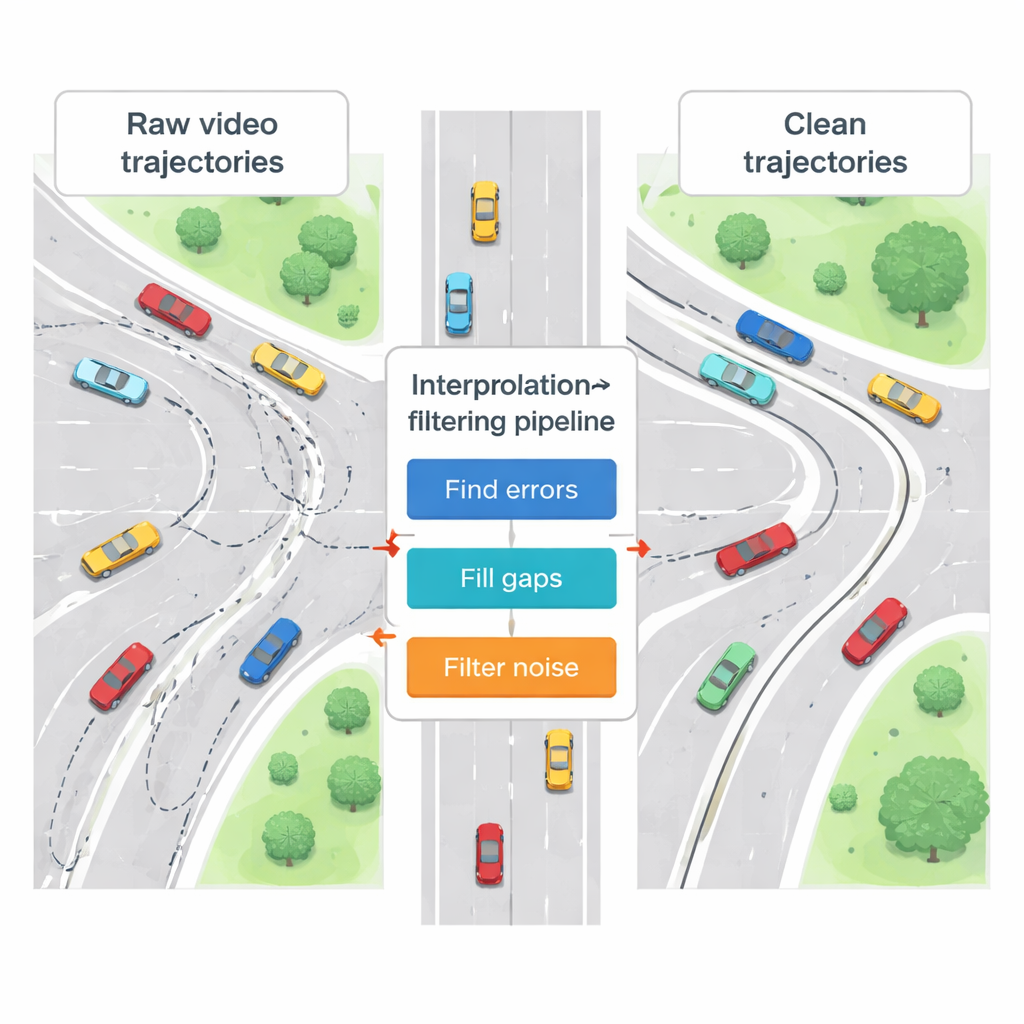
Un plan de nettoyage en deux étapes
Pour réparer ces dommages, les auteurs proposent une stratégie de reconstruction en deux étapes qui fonctionne comme un mécanicien numérique attentif. La première étape se concentre sur les erreurs évidentes : elle scrute l’historique de chaque véhicule à la recherche de vitesses et d’accélérations qui dépassent des limites physiques simples, comme des variations de jerk extrêmement élevées (changements très soudains d’accélération) ou des accélérations supérieures à ce qu’un véhicule et son conducteur peuvent raisonnablement supporter. Une fois ces points aberrants identifiés, ils sont remplacés à l’aide d’outils mathématiques appelés interpolations, qui estiment les valeurs manquantes à partir des points voisins plus fiables. L’étude compare plusieurs variantes d’interpolation et montre qu’une approche dite interpolation d’Hermite préserve mieux la forme naturelle de la trajectoire qu’une méthode de Lagrange plus traditionnelle, notamment lorsque le mouvement est complexe.
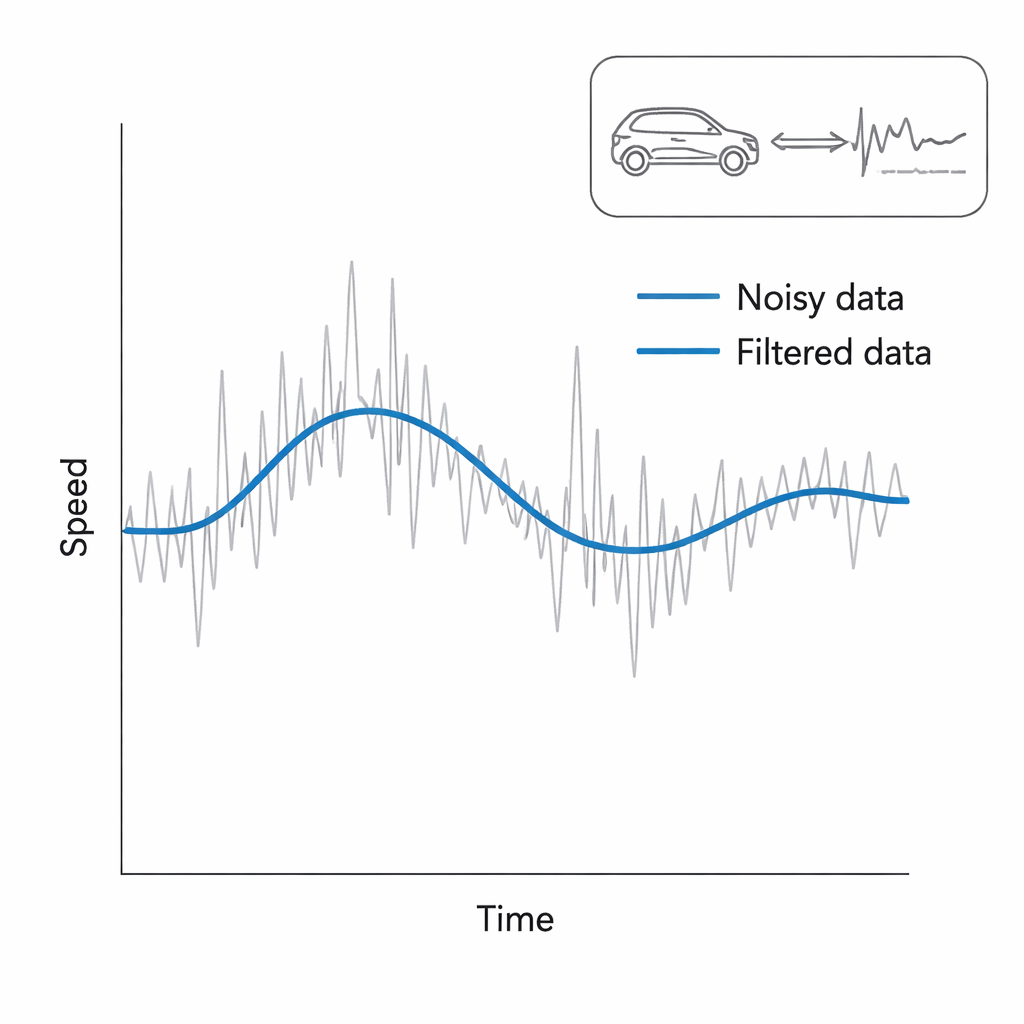
Lisser le parcours numérique
La deuxième étape traite le problème plus subtil du bruit. Même après correction des erreurs grossières, les traces restantes peuvent encore paraître légèrement instables. Les chercheurs testent ici deux façons de lisser les données : une méthode de moyenne mobile raffinée qui donne plus de poids aux points récents, et une technique statistique connue sous le nom de filtre de Kalman, qui met continuellement à jour sa meilleure estimation de la position et de la vitesse réelles d’un véhicule à mesure que de nouvelles mesures arrivent. Les deux techniques atténuent le jitter, mais le filtre de Kalman suit mieux les variations réelles de conduite — par exemple un léger freinage ou un changement de voie — sans les estomper. Le résultat est une description plus lisse et plus réaliste du comportement de chaque véhicule au fil du temps.
Évaluer la méthode
L’équipe applique son cadre à des vidéos réelles captées à une intersection urbaine fréquentée de Zhengzhou, en Chine, en utilisant des logiciels modernes de détection d’objets et de suivi pour extraire les trajectoires des véhicules. Ils font ensuite passer des dizaines de traces de véhicules différentes par leur processus en deux étapes et jugent le succès à l’aide d’indicateurs physiques simples : l’ampleur des fluctuations d’accélération, et la fréquence à laquelle le jerk dépasse un niveau jugé irréaliste pour des voitures particulières. Ils comparent également les trajectoires vidéo nettoyées aux données de référence enregistrées directement par les instruments du tableau de bord d’un véhicule. Sur de nombreux profils de conduite — croisière stable, freinage brusque, changements de voie — la stratégie combinée interpolation-et-filtrage réduit la variabilité de l’accélération d’environ 85 % et élimine presque complètement les pics de jerk peu plausibles, tout en se rapprochant davantage des enregistrements instrumentaux que plusieurs méthodes concurrentes.
Ce que cela signifie pour les trajets quotidiens
Concrètement, cet article montre comment transformer des images imparfaites provenant de caméras de circulation ordinaires en données sur lesquelles les ingénieurs et les véhicules automatisés peuvent réellement se fier. En réparant d’abord les anomalies évidentes puis en lissant soigneusement le bruit, la méthode proposée produit des traces numériques réalistes des déplacements des voitures, sans exiger de matériel exotique ni une puissance de calcul importante. Cette image plus propre peut alimenter une meilleure synchronisation des feux, des simulations de congestion plus précises et des algorithmes de conduite autonome plus sûrs qui dépendent de la compréhension du comportement réel de conduite. Bien que l’étude se focalise sur une seule ville et ne couvre pas encore toutes les conditions météorologiques ou routières, elle trace une voie claire et pratique pour utiliser les réseaux vidéo existants comme capteurs fiables pour la prochaine génération de systèmes de transport intelligents.
Citation: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Mots-clés: trajectoire de véhicule, données vidéo de trafic, dénoyautage des données, transport intelligent, conduite autonome