Clear Sky Science · fr
Contrôle neural adaptatif basé sur ESO pour un quadrirotor face aux perturbations de vent et de charge utile
Maintenir les drones stables dans un monde réel agité
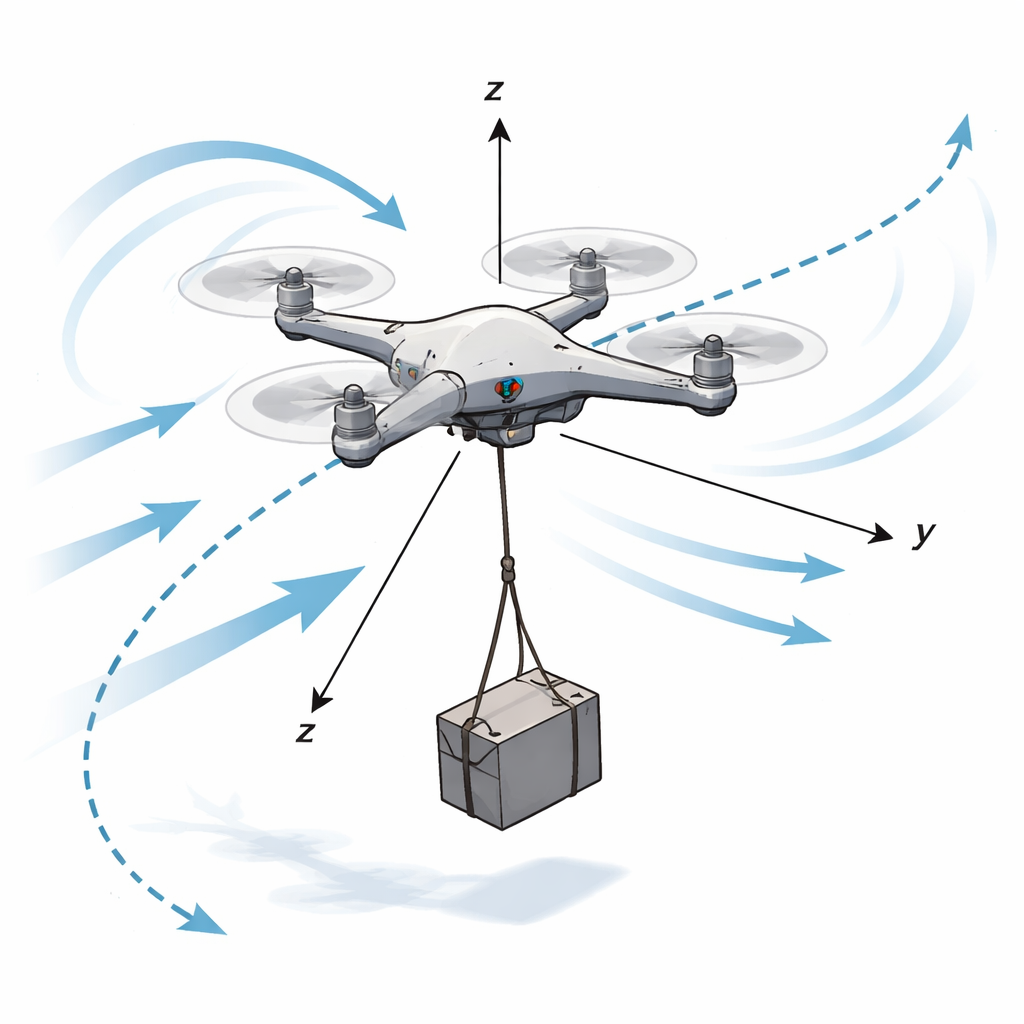
Les petits drones à quatre rotors sont de plus en plus utilisés pour des missions comme l’inspection de ponts, la surveillance des cultures ou la livraison de petits colis. Mais dans le monde réel, ces robots volants doivent faire face à des rafales de vent et à des charges oscillantes suspendues en dessous d’eux, qui peuvent facilement les dévier de leur trajectoire. Cet article présente une nouvelle méthode pour maintenir ces drones sur leurs trajectoires prévues, même lorsque l’air est instable et qu’une charge oscillante les tire dans tous les sens.
Pourquoi le vent et les charges suspendues sont si problématiques
Un drone quadrirotor est intrinsèquement difficile à contrôler. Il est léger, réagit rapidement à de petites variations de moteurs et ses mouvements selon différentes directions sont fortement couplés. Lorsque des vents forts ou changeant rapidement frappent le drone, ils le poussent de manière imprévisible. L’ajout d’une charge suspendue par câble, comme un support caméra ou une bouteille de liquide, aggrave la situation : la charge peut osciller comme un pendule et renvoyer des forces supplémentaires vers le drone. Les contrôleurs traditionnels, tels que la approche PID largement utilisée ou des schémas plus avancés comme le sliding-mode et le backstepping, fonctionnent bien seulement lorsque les ingénieurs connaissent la physique du drone avec précision et lorsque les perturbations sont modestes. Si le modèle mathématique est inexact, ou si le vent et les forces de la charge varient de façon complexe, ces méthodes peuvent produire des réponses lentes, des dépassements ou des oscillations visibles en vol.
Un chien de garde intelligent pour les perturbations inconnues
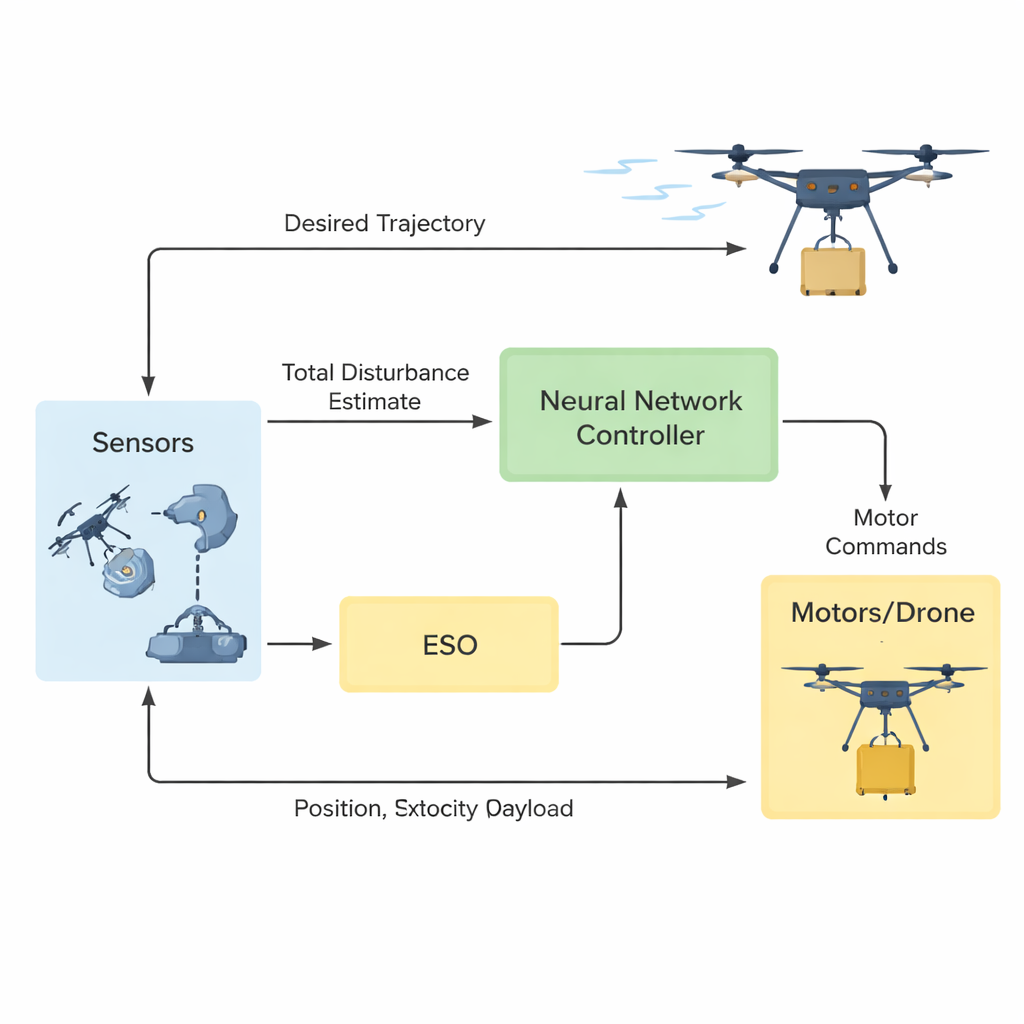
Pour répondre à ce problème, les auteurs s’appuient sur un concept appelé rejet actif des perturbations. Plutôt que d’essayer de modéliser chaque détail du vent et de la charge oscillante, ils traitent toutes les influences inconnues comme une « perturbation regroupée ». Un observateur d’état étendu spécialement conçu joue le rôle d’un chien de garde mathématique, inférant en permanence cette perturbation totale à partir du mouvement du drone. Notamment, leur observateur est réglé à l’aide d’un seul paramètre principal, ce qui simplifie grandement la mise en œuvre comparé à de nombreuses conceptions existantes. La théorie montre qu’avec un réglage approprié, l’estimation de la perturbation par l’observateur converge rapidement et reste strictement bornée, ce qui signifie qu’elle peut être utilisée comme correction en avance en temps réel plutôt que comme une estimation grossière.
Laisser un réseau de neurones apprendre les parties difficiles
Même avec de bonnes estimations de perturbation, le contrôleur doit encore connaître comment les moteurs du drone transforment les commandes en mouvement réel — une relation qui dépend de la masse, de la géométrie et d’autres détails physiques susceptibles d’évoluer dans le temps. Plutôt que de s’appuyer sur un modèle identifié laborieusement, les auteurs introduisent un réseau de neurones à fonctions de base radiale qui apprend cette relation directement à partir des signaux de vol. Le contrôleur n’a besoin de connaître que la position du drone, sa consigne et la dérivée seconde du trajet souhaité (c’est‑à‑dire l’accélération de la trajectoire cible). Une loi adaptative met à jour en continu les poids internes du réseau pour réduire les erreurs de suivi. À l’aide d’une analyse basée sur la fonction de Lyapunov, les auteurs démontrent que, sous ce schéma adaptatif, les erreurs de suivi restent uniformément bornées et peuvent être rendues arbitrairement petites, tandis que les mises à jour des poids demeurent stables.
Mise à l’épreuve de la méthode
L’équipe valide son approche à la fois par des simulations informatiques et des expériences réelles. Dans les simulations, le drone doit suivre des trajectoires spirales tridimensionnelles exigeantes tout en subissant des rafales de vent aléatoires et des forces de charge qui varient dans le temps. Le nouveau contrôleur est comparé à trois autres méthodes avancées : le rejet actif linéaire des perturbations, le contrôle en mode glissant (sliding-mode), le contrôle terminal en mode glissant sans modèle, et dans un test plus difficile, le contrôle adaptatif d’ordre fractionnaire. Dans de multiples scénarios, la méthode proposée obtient des trajectoires plus lisses et des erreurs quadratiques moyennes de position plus faibles, en particulier après l’apparition des perturbations. Dans les tests physiques, les chercheurs font voler un quadrirotor en intérieur pendant que deux ventilateurs industriels soufflent dessus et qu’une bouteille d’eau de 200 grammes est suspendue en dessous. Des caméras de capture de mouvement enregistrent la position du drone. Même sous vent continu et avec des tirages manuels sur la charge, le drone maintient son point cible à quelques centimètres près et les commandes moteurs restent bien comportées, ce qui suggère que la méthode est praticable sur du matériel réel.
Ce que cela signifie pour l’usage courant des drones
Pour les non‑spécialistes, l’idée principale est que ce travail propose un moyen de rendre les drones plus fiables en conditions difficiles sans exiger une connaissance parfaite de leur physique interne. En combinant un observateur de perturbation simple mais puissant avec un contrôleur basé sur l’apprentissage, le système peut s’adapter en temps réel aux rafales de vent et aux charges oscillantes, en maintenant le drone sur sa trajectoire avec un minimum d’efforts de réglage. Ce type de contrôle robuste et peu dépendant du modèle pourrait faciliter le déploiement des drones pour des tâches courantes en milieu urbain, agricole et industriel, et les mêmes idées pourraient à terme s’étendre à des essaims de drones et à des conceptions tolérantes aux fautes qui continuent de voler en sécurité même lorsque certains composants tombent en panne.
Citation: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Mots-clés: contrôle de quadrirotor, stabilité de drone, perturbation due au vent, contrôleur par réseau de neurones, suivi de charge utile