Clear Sky Science · fr
La «whitening» PCA améliore la tolérance à l’éclairage pour la reconnaissance de lieux visuels avec des signatures de Fourier
Les robots retrouvent leur chemin à l’intérieur
Imaginez un robot qui se déplace dans une maison ou un bureau où il fait un soleil éclatant un jour et une lumière tamisée le lendemain. Pour savoir où il se trouve, le robot compare ce que sa caméra voit maintenant avec des images qu’il a stockées auparavant. Mais lorsque l’éclairage change fortement, les lieux peuvent devenir presque méconnaissables. Cet article explore une méthode sobre et mathématique pour que les robots reconnaissent des lieux à partir d’images panoramiques, et montre comment une astuce statistique appelée «whitening» PCA rend cette méthode bien plus tolérante aux variations d’éclairage.
Voir le monde comme des ondes, pas des pixels
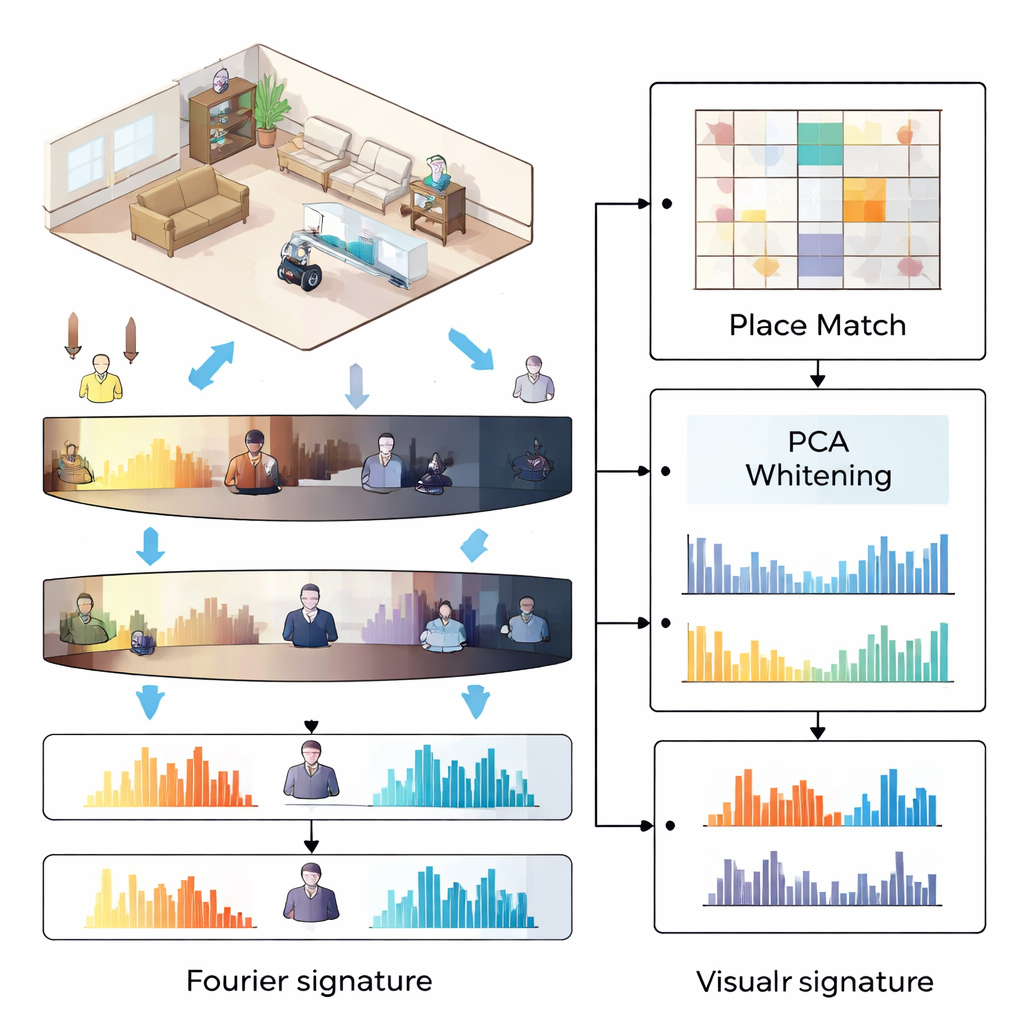
La plupart des systèmes modernes de reconnaissance de lieux visuels exploitent de nombreux petits détails dans une image — arêtes, coins et textures — puis les recombinent en une «empreinte» compacte. En revanche, ce travail s’appuie sur des signatures de Fourier, qui considèrent une image panoramique non pas comme une grille de pixels mais comme un mélange d’ondes de différentes fréquences. La caméra capture un champ de vue à 360 degrés ; ce panorama est découpé en bandes horizontales, et chaque bande est convertie en un spectre de fréquences unidimensionnel. Seules les amplitudes des basses fréquences sont conservées et empilées pour former un descripteur. Comme la méthode ignore l’information sur la position angulaire des éléments le long du cercle, le descripteur change peu lorsque le robot tourne sur lui‑même, ce qui lui confère une robustesse innée à la rotation.
Pourquoi l’éclairage compromet les signatures simples
Même si les signatures de Fourier sont compactes et rapides à calculer, elles restent vulnérables lorsque l’éclairage varie fortement entre deux enregistrements du même lieu. Les images naturelles ont tendance à concentrer beaucoup plus d’énergie dans les basses fréquences que dans les hautes, et ce déséquilibre est affecté par l’éclairage. En conséquence, certaines parties du descripteur dominent la mesure de similarité, et de nombreuses entrées sont fortement corrélées entre elles parce que des rangées voisines du panorama se ressemblent. Sans correction, la décision du système quant à savoir si deux images montrent le même endroit est pilotée par un petit sous‑ensemble redondant de valeurs, ce qui le rend fragile face à des conditions d’éclairage différentes.
Épurer le signal avec la «whitening» PCA
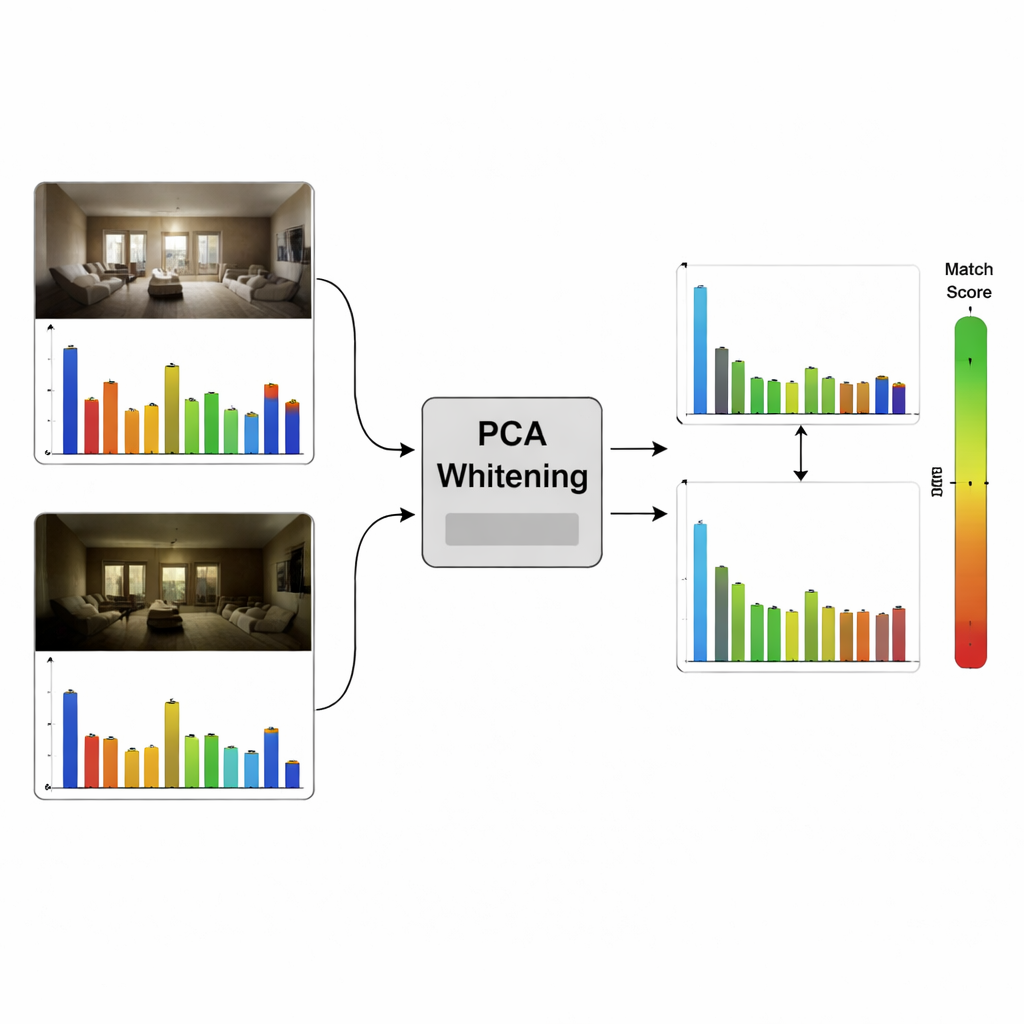
L’auteur propose d’ajouter une étape de «whitening» PCA en post‑traitement des descripteurs de Fourier. À partir d’un ensemble d’entraînements constitué de panoramas provenant de sept environnements intérieurs, le système apprend comment les entrées du descripteur varient et se corrèlent. La «whitening» PCA recentre ensuite le descripteur, le fait pivoter selon des directions de variation indépendantes, et rééchelonne chaque direction afin que toutes aient une influence égale. Cela supprime les corrélations redondantes et équilibre la contribution des différentes fréquences. Comme les composantes transformées sont triées par importance, le descripteur peut aussi être raccourci en toute sécurité en coupant la queue. Des expériences sur trois environnements inconnus comportant plusieurs variantes d’éclairage montrent que le whitening augmente de façon constante la probabilité que le lieu correct figure parmi les premiers candidats récupérés, en particulier dans le cas pratiquement important où l’on ne renvoie qu’une courte liste de correspondances plausibles.
Léger mais compétitif avec l’apprentissage profond
Pour évaluer la pertinence de cette approche allégée par rapport aux tendances actuelles, l’article la compare à AnyLoc, une méthode récente de reconnaissance de lieux visuels basée sur un très grand réseau de type vision transformer. AnyLoc utilise également une compression basée sur la PCA, mais à partir de caractéristiques de haute dimension produites par l’apprentissage profond. Sur le jeu de données panoramique intérieur, les signatures de Fourier blanchies égalent ou dépassent les performances d’AnyLoc lorsque le système est autorisé à proposer jusqu’à environ dix images candidates, ce qui constitue un point de fonctionnement réaliste pour de nombreux robots. Surtout, la méthode basée sur Fourier est beaucoup moins coûteuse à exécuter : elle s’appuie sur des transformées de Fourier rapides et des opérations matricielles simples sur CPU, alors qu’AnyLoc nécessite un GPU puissant et beaucoup plus de temps par image.
Ce que cela signifie pour les robots du quotidien
Pour un lecteur non spécialiste, le message central est que l’utilisation intelligente des mathématiques classiques peut encore rivaliser avec des intelligences artificielles lourdes sur certaines tâches. En transformant les images panoramiques en descripteurs équilibrés et décorrelés, la «whitening» PCA rend une méthode simple de reconnaissance de lieux basée sur les fréquences beaucoup plus résistante aux changements d’éclairage. Les robots qui adoptent cette approche peuvent se localiser de manière fiable dans des maisons et des bureaux sous une large gamme de conditions d’éclairement, tout en utilisant des ressources de calcul modestes. Cela rend la navigation visuelle robuste plus accessible pour des robots plus petits et moins chers qui pourraient un jour partager nos espaces quotidiens.
Citation: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
Mots-clés: reconnaissance de lieux visuelle, robots mobiles, imagerie panoramique, signatures de Fourier, whitening PCA