Clear Sky Science · fr
Poursuite pure améliorée avec commande de braquage dynamique pour robots mobiles autonomes et application à la navigation sûre dans les usines chimiques
Des robots qui restent sur la trajectoire
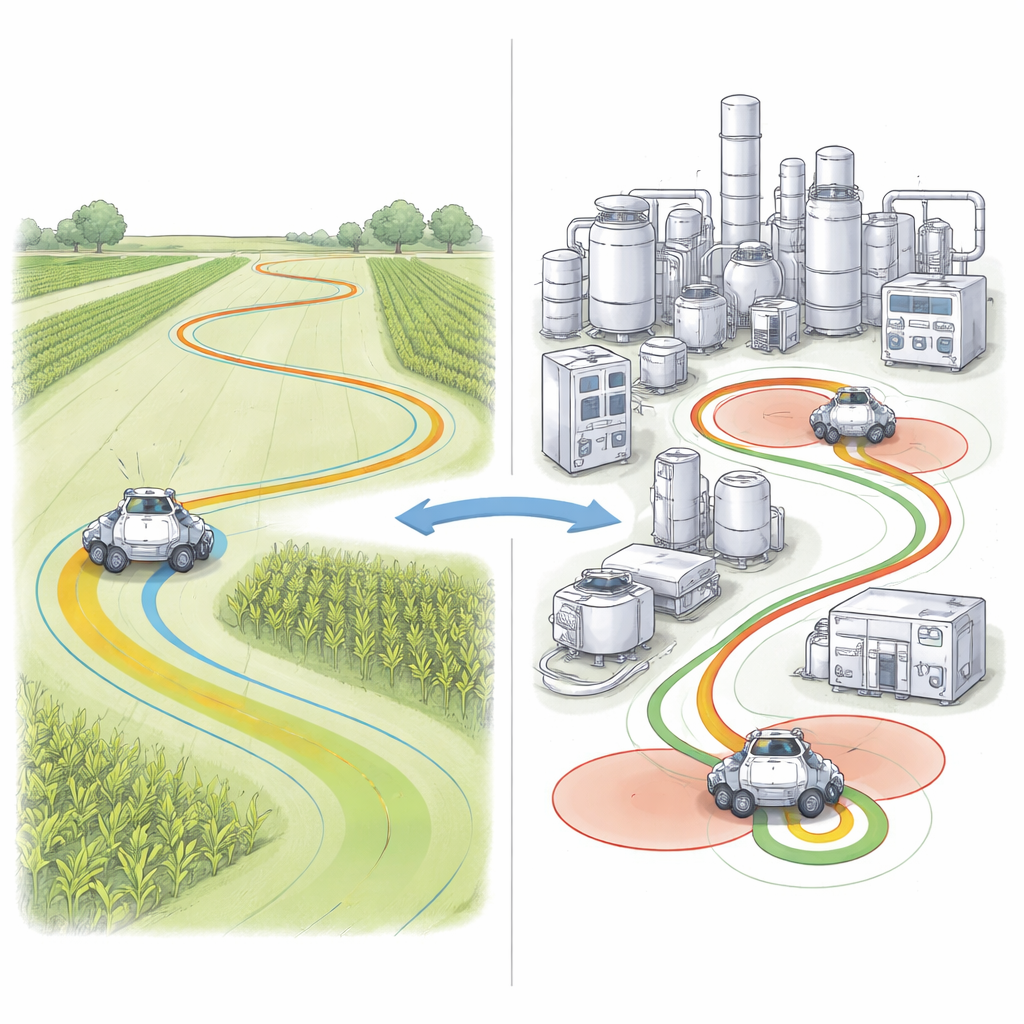
À mesure que les robots sortent des ateliers propres pour gagner les champs et les usines chimiques, ils doivent suivre des trajectoires étroites avec une grande précision. Un léger balancement peut écraser des cultures, heurter des canalisations ou rouler dans une zone où des gaz inflammables sont présents. Cet article décrit une nouvelle manière pour des robots à roues de diriger et contrôler leur vitesse afin de rester proches d’un itinéraire planifié, tant en espaces ouverts qu’en sites industriels confinés.
Pourquoi guider un robot est difficile
Beaucoup de robots mobiles autonomes utilisent aujourd’hui une règle simple appelée « poursuite pure » pour suivre une trajectoire. Le robot regarde un court instant vers l’avant le long de la route, vise ce point, et répète le processus rapidement. En pratique, les ingénieurs doivent choisir la distance d’anticipation et la vitesse. Si la distance d’anticipation est trop courte, le robot réagit de façon nerveuse et peut zigzaguer. Si elle est trop longue, il réagit trop lentement et coupe les virages, surtout sur les courbes serrées ou à grande vitesse. En extérieur, une autre complication apparaît : la position du robot est estimée en combinant signaux satellitaires, capteurs de mouvement et capteurs de rotation des roues, chacun ayant ses propres erreurs et délais.
Une manière plus intelligente de braquer et de régler la vitesse
Les auteurs proposent une méthode améliorée appelée Poursuite Pure avec Commande de Braquage Dynamique (PP-DSC). Plutôt que de garder la distance d’anticipation et la vitesse fixes, le robot ajuste les deux en temps réel selon la netteté du virage. Quand l’angle de braquage est faible et que la trajectoire est presque droite, le robot utilise une plus grande anticipation et une vitesse plus élevée pour un déplacement fluide et efficace. À mesure que l’angle de braquage augmente dans les virages, la distance d’anticipation diminue et la vitesse chute automatiquement, donnant au robot plus de temps pour réagir et réduisant la dérive latérale. Ce comportement est implémenté sur un robot à quatre roues de type automobile qui utilise un cadre logiciel de robotique moderne ainsi qu’un positionnement satellitaire haute précision, un capteur inertiel et des encodeurs de roue pour estimer son mouvement.

Tests sur le terrain et dans des usines chimiques virtuelles
Pour évaluer les performances de la PP-DSC, l’équipe a réalisé des expériences en extérieur sur trois trajectoires de base : une ligne droite, une boucle et un huit, à des vitesses de 1 à 5 mètres par seconde. Ils ont comparé la nouvelle méthode à l’approche classique de poursuite pure. Le contrôleur amélioré a permis de maintenir le robot beaucoup plus près de la trajectoire prévue dans tous les cas. Sur les lignes droites, l’erreur latérale moyenne est tombée à environ cinq centimètres, et sur les courbes l’erreur est restée inférieure à huit centimètres. En revanche, la méthode traditionnelle pouvait dériver de plusieurs dizaines de centimètres et présentait des pics plus importants lors de l’entrée ou de la sortie des virages, notamment à vitesse élevée.
Ajouter de la sécurité dans les zones dangereuses
Les chercheurs ont aussi examiné le comportement potentiel d’un tel robot à l’intérieur d’une usine chimique, où il pourrait inspecter des réacteurs chauds ou transporter des échantillons. Plutôt que de construire un banc d’essai industriel complet, ils ont utilisé un modèle informatique détaillé d’une usine de biodiesel incluant la position des équipements et des zones à risque accru d’incendie et d’explosion. Ils ont étendu leur contrôleur avec un facteur de sécurité qui ralentit automatiquement le robot lorsqu’il pénètre dans ces zones dangereuses, en s’appuyant sur un indice standard d’incendie et d’explosion utilisé en sûreté des procédés. Les simulations ont montré que cette version sensible à la sécurité de la PP-DSC n’augmentait que légèrement l’erreur de suivi — moins d’un pour cent en moyenne — tout en garantissant que le robot réduise sa vitesse autour des équipements dangereux.
Choisir l’outil adapté à chaque mission
Une conclusion intéressante est qu’aucune stratégie de braquage unique n’était la meilleure partout. Dans des champs ouverts aux courbes douces, la méthode dynamique a clairement surpassé l’approche traditionnelle, maintenant la trajectoire du robot serrée et fluide même à des vitesses plus élevées. Dans la géométrie confinée d’une usine chimique, cependant, la poursuite pure simple avec une anticipation fixe faisait parfois mieux, notamment sur des boucles serrées et des trajectoires en « huit » auto‑croisées où l’anticipation dynamique pouvait accidentellement déplacer le robot vers la mauvaise branche du chemin. Les auteurs concluent que les robots devraient basculer entre stratégies selon la forme du chemin : utiliser le contrôleur amélioré et intégré à la sécurité pour les courbes modérées et les déplacements sensibles au risque, et revenir à un schéma à anticipation fixe pour les trajectoires très serrées ou bouclées. Pour les non‑spécialistes, le message clé est que la navigation robotique sûre et fiable dans des usines et des champs réels ne se résume pas à de bonnes cartes et de bons capteurs — la manière dont le robot choisit où regarder et à quelle vitesse avancer est tout aussi importante.
Citation: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Mots-clés: robots mobiles autonomes, suivi de trajectoire, commande de braquage, navigation GNSS-RTK, sécurité des installations chimiques