Clear Sky Science · fr
Détection légère de cibles et suivi multi-cible pour l’inspection par UAV dans les mines à ciel ouvert
Des yeux plus intelligents dans le ciel
Les mines à ciel ouvert sont des espaces vastes et difficiles où camions lourds, excavatrices et personnel se déplacent en permanence. Assurer la sécurité et le bon fonctionnement nécessite généralement de nombreux agents au sol et des équipements de géolocalisation coûteux, et pourtant des petites défaillances ou des intrusions peuvent encore passer inaperçues. Cet article explore comment des drones intelligents et légers peuvent patrouiller ces carrières depuis les airs, repérer automatiquement en temps réel les équipements, les personnes et les problèmes, tout en respectant les contraintes de calcul serrées des électroniques embarquées.
Pourquoi les mines ont besoin de meilleures sentinelles
Les mines modernes s’appuient déjà sur des outils comme la géoposition par satellite et des balises radio spéciales pour suivre camions et engins. Mais ces systèmes « actifs » ont des angles morts : les signaux peuvent être bloqués par des parois abruptes, la poussière ou des interférences, et ils ne fonctionnent que sur les véhicules et personnes qui portent les dispositifs appropriés. Ils ne peuvent pas non plus montrer à quoi ressemble réellement une panne. Les drones, en revanche, peuvent survoler des terrains difficiles, capturer des images et des vidéos riches, et suivre des cibles non coopératives comme des véhicules en infraction. Le défi est que les algorithmes visuels puissants demandent normalement des ordinateurs lourds, alors que les drones disposent d’une capacité limitée en poids, énergie et calcul. Les auteurs se sont donc attachés à concevoir un système de détection et de suivi à la fois précis et suffisamment léger pour fonctionner directement sur un drone.
Apprendre aux drones à voir les cibles petites et cachées
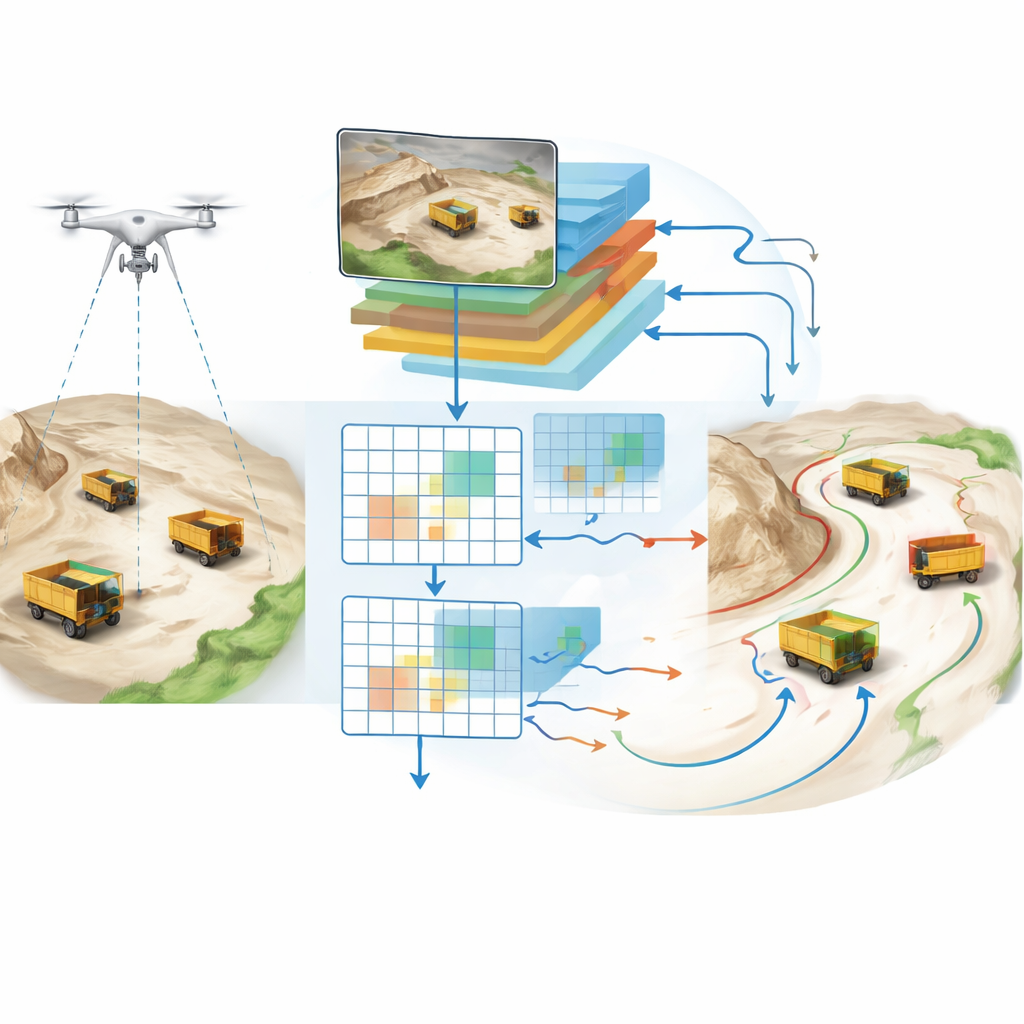
Au cœur du travail se trouve une version améliorée d’un modèle de vision populaire appelé YOLO, spécialement adaptée aux mines à ciel ouvert. Les chercheurs remodèlent le « backbone » du réseau afin qu’il puisse suivre les contours irréguliers des camions, des excavatrices et des tas de roches, plutôt que de s’en remettre à des filtres rigides en grille. Ils repensent également la partie du réseau qui fusionne l’information issue d’échelles d’image grossières et fines, de sorte que les machines petites et lointaines et les engins plus gros et proches soient captés ensemble sans confusion. Par-dessus cela, un nouveau module de décision léger concentre l’attention sur les détails les plus informatifs de la scène, aidant le système à distinguer de petits points de défaillance et des machines partiellement cachées du fond encombré.
Faire tenir des modèles puissants sur un drone
Même avec ces améliorations, un modèle de vision peut rapidement devenir trop volumineux pour le matériel d’un drone. Pour y remédier, l’équipe applique une stratégie d’élagage soigneuse qui analyse quelles connexions internes contribuent le plus aux performances, puis supprime le reste. Ce processus réduit le nombre de paramètres et la quantité de calcul tout en préservant les chemins les plus importants du réseau. À un niveau d’élagage optimal, le système conserve une forte précision de détection tout en diminuant la taille du modèle, les opérations et le temps de réponse suffisamment pour fonctionner sur un processeur embarqué compact, en consommant moins d’énergie et en prolongeant l’autonomie de vol. Des tests sur un jeu de données minier personnalisé et sur une référence publique pour drones montrent que le modèle élagué surpasse plusieurs alternatives bien connues, en particulier pour les cibles petites et partiellement cachées.
Des instantanés aux trajectoires fluides
Repérer des objets sur une image ne raconte qu’une partie de l’histoire ; les mines ont aussi besoin de savoir comment chaque camion ou personne se déplace au fil du temps. Pour cela, les auteurs améliorent une approche existante de suivi multi-objets afin qu’elle gère mieux les scènes encombrées, les véhicules se ressemblant et les changements soudains de mouvement. Ils créent une mesure de similarité combinée qui prend en compte la position d’une cible, son apparence et même si elle semble chargée ou vide. Ils corrigent aussi les prédictions de mouvement pour tenir compte des variations d’accélération, par exemple lorsqu’un camion tourne ou monte une pente. Ensemble, ces étapes réduisent les erreurs d’identité — où un véhicule est confondu avec un autre — et maintiennent des trajectoires lisses et fiables, tout en restant suffisamment rapides pour une utilisation en temps réel sur du matériel de niveau drone.
Vers des patrouilles minières non habitées et toujours actives
Enfin, les auteurs intègrent leurs modules de vision et de suivi dans un système d’inspection à plusieurs couches capable de coordonner plusieurs drones, de diffuser des données via des liaisons 5G et ad hoc, et d’alimenter les centres de contrôle au sol. Dans des expériences menées sur des mines réelles, cette configuration améliore nettement la précision et la stabilité de la surveillance des matériels par rapport aux méthodes traditionnelles. Pour les non-spécialistes, la conclusion clé est que l’étude montre une voie pratique vers l’utilisation de petits robots volants efficaces pour garder en continu d’immenses sites industriels, détecter de petites défaillances, des visiteurs non enregistrés et des situations à risque avant qu’elles n’empirent — sans nécessiter d’ordinateurs encombrants ni de réseaux denses de balises sur chaque véhicule.
Citation: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
Mots-clés: inspection par drone, exploitation à ciel ouvert, détection d’objets, suivi multi-objets, modèles d’IA légers