Clear Sky Science · fr
Une interface cerveau-machine intracorticale basée sur l’activité du cortex prémoteur ventral chez le macaque
Apprendre au cerveau à déplacer un curseur
Imaginez diriger un curseur d’ordinateur ou un bras robotique uniquement par la pensée, même si vos muscles ne peuvent plus bouger. Les interfaces cerveau–machine (ICM) visent à rendre cela possible en traduisant l’activité cérébrale en commandes pour des dispositifs externes. Jusqu’ici, la plupart des systèmes ont exploité une principale zone motrice du cerveau ; que se passe-t-il si cette zone est endommagée, comme dans les cas d’AVC ou de SLA ? Cette étude examine si une autre zone voisine, généralement impliquée dans la planification des actions de la main et dans l’observation des mouvements d’autrui, peut aussi piloter de façon fiable une ICM.
Une nouvelle zone rejoint l’équipe
Les ICM classiques lisent principalement les signaux du cortex moteur primaire, la bande de tissu cérébral qui contrôle directement les mouvements volontaires, et d’une région de planification voisine appelée cortex prémoteur dorsal. Les chercheurs se sont intéressés à une autre voisine : le cortex prémoteur ventral, plus précisément une zone nommée F5c. Chez le macaque, F5c contient de nombreuses cellules qui s’activent lorsque l’animal atteint et saisit des objets, et même lorsqu’il observe simplement des actions à l’écran. Ce mélange de réponses liées au mouvement et à l’observation suggérait que F5c pourrait convenir pour contrôler un curseur ou un « avatar » robotique sans nécessiter de mouvement corporel.
Macaques, microélectrodes et cibles mobiles
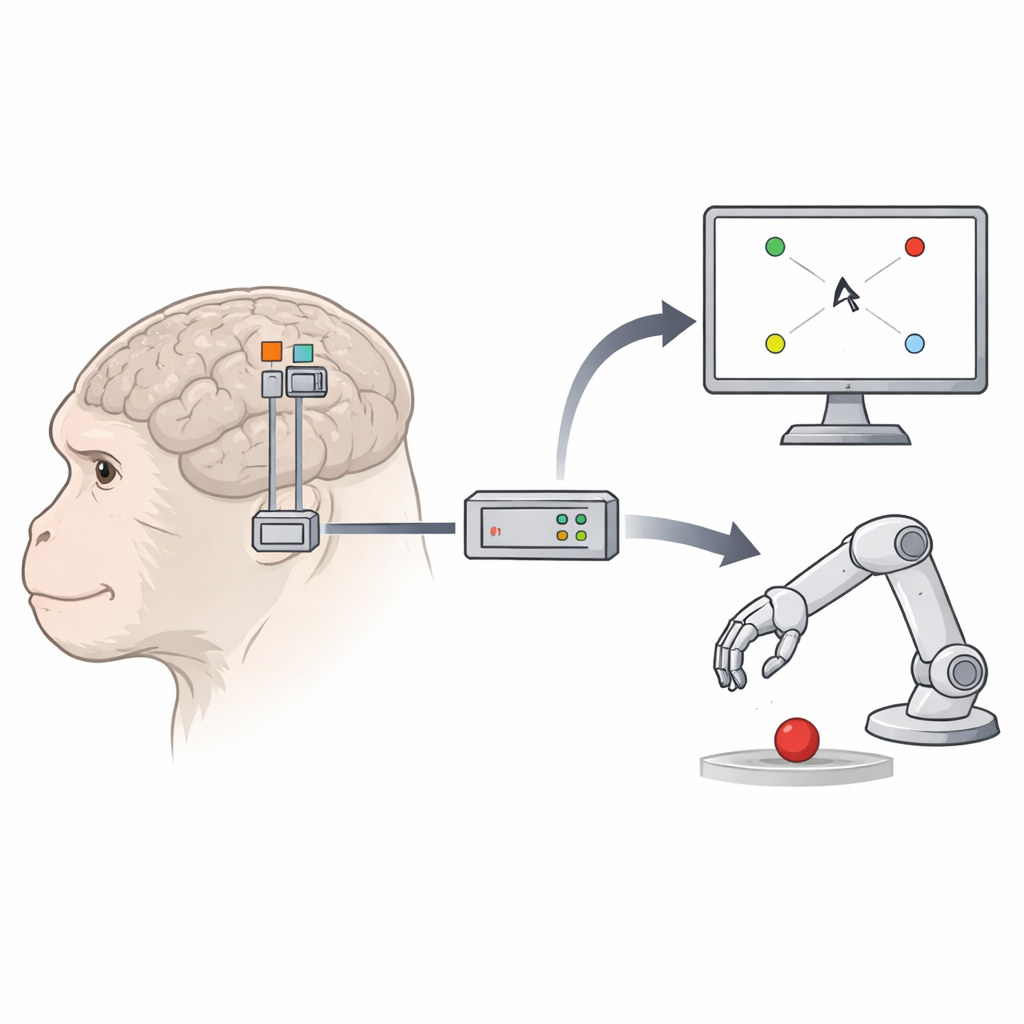
Deux macaques ont été implantés avec de petites grilles de 96 électrodes à trois emplacements : cortex moteur primaire, cortex prémoteur dorsal et F5c. Lors de sessions quotidiennes, les animaux ont réalisé plusieurs tâches visuellement simples mais exigeantes sur le plan comportemental. Dans une tâche, ils touchaient le centre d’un écran puis atteignaient l’une des huit cibles extérieures, tandis qu’un petit curseur à l’écran se déplaçait du centre vers la même cible. Dans une seconde tâche, ils gardaient la main immobile et se contentaient de regarder le curseur se diriger vers les cibles. Dans une troisième configuration plus réaliste, le curseur était remplacé par un bras robot 3D avatar atteignant des cibles dans une scène virtuelle. Grâce à ces tâches, l’équipe a pu comparer la capacité de chaque zone cérébrale à piloter le curseur ou l’avatar.
Comment les signaux cérébraux sont devenus un mouvement fluide
Pendant une phase d’entraînement, le curseur ou l’avatar suivait des trajectoires générées par ordinateur, légèrement courbées, pendant que les macaques bougeaient ou regardaient. Simultanément, les électrodes enregistraient des rafales rapides d’activité cérébrale. Les chercheurs ont ensuite entraîné un décodeur — un outil mathématique qui apprend à associer des motifs d’activité neuronale aux vitesses du curseur ou de l’avatar à l’écran. Pour ne retenir que les canaux les plus informatifs, ils ont sélectionné les électrodes dont l’activité suivait la direction et la vitesse du mouvement. Ils ont utilisé une méthode qui isole les schémas cérébraux les plus étroitement liés au comportement et l’ont enrichie par une étape non linéaire, permettant au système de capturer des relations plus complexes entre l’activité neuronale et le mouvement. En phase de décodage, l’ordinateur a cessé de piloter le curseur ou l’avatar ; le décodeur, utilisant des signaux cérébraux en direct mis à jour toutes les 50 millisecondes, dirigeait le mouvement à l’écran. Le décodeur était périodiquement réentraîné en arrière-plan afin de s’adapter aux évolutions des réponses neuronales au fil du temps.

Quelle performance pour cette « nouvelle » zone ?
La question centrale était de savoir si F5c pouvait égaler ou se rapprocher des performances des zones de contrôle traditionnelles. Chez les deux macaques, le décodage basé sur F5c accusait d’abord un retard dans le déplacement du curseur, surtout lorsque les animaux se contentaient d’observer et ne bougeaient pas la main. Mais au fil des sessions — et à mesure que davantage d’électrodes fournissaient des signaux fiables liés au mouvement — F5c a rattrapé son retard. Dans plusieurs conditions, ses performances ont égalé celles du cortex moteur primaire et les ont même dépassées lors de sessions ultérieures pour le contrôle passif du curseur. Lors du contrôle de l’avatar robot, le succès global était plus faible pour toutes les zones, mais F5c a néanmoins permis un contrôle significatif, surtout lorsqu’il était associé à un algorithme d’assistance doux qui guidait subtilement l’avatar vers la cible. Il est important de noter que les neurones des trois régions montraient des schémas similaires d’accordage directionnel et d’activité de population pendant la phase d’entraînement conduite par l’ordinateur et la phase de contrôle actif, seule une sous-population changeant ses directions préférentielles à mesure que les macaques apprenaient à piloter l’ICM.
Ce que cela signifie pour la neurotechnologie future
Pour un non-spécialiste, la conclusion essentielle est que la zone prémotrice ventrale F5c — autrefois considérée principalement comme une région de planification et d’observation des actions — peut aussi servir de centre de contrôle pratique pour les interfaces cerveau–machine. Lorsqu’un nombre suffisant de signaux liés au mouvement est disponible, des décodeurs entraînés sur l’activité de F5c peuvent guider un curseur d’écran ou un robot d’assistance presque aussi bien que ceux basés sur la zone motrice classique. Cela suggère que les futures ICM cliniques n’auront pas nécessairement à dépendre d’une seule région corticale. Pour des personnes dont le cortex moteur primaire est endommagé, des régions de planification voisines comme le cortex prémoteur ventral pourraient offrir une voie alternative pour retrouver le contrôle d’outils numériques, de dispositifs prothétiques ou d’aides à la mobilité.
Citation: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
Mots-clés: interface cerveau-machine, cortex moteur, cortex prémoteur, décodage neuronal, contrôle prothétique