Clear Sky Science · fr
Un système flou de type 3 basé sur une structure virtuelle pour la détection, la compensation et le contrôle prédictif des défauts de capteurs et d’actionneurs dans les systèmes non linéaires
Maintenir les machines sur la bonne trajectoire quand des pièces défaillent
Les technologies modernes — des bras robotiques sur les lignes de production aux usines chimiques régulant l’acidité — dépendent de capteurs et d’actionneurs qui font fonctionner les systèmes en silence. Mais lorsque ces éléments dérivent, se bloquent ou tombent en panne, un système peut devenir dangereux bien avant qu’on ne s’en aperçoive. Cet article présente une nouvelle méthode permettant aux machines de détecter et de corriger ces problèmes de manière autonome, même lorsque les ingénieurs ne disposent pas d’un modèle mathématique précis du comportement interne du système.
Pourquoi les problèmes cachés sont si difficiles à détecter
Dans de nombreux contextes réels, le comportement d’un système est fortement non linéaire : de petites variations d’entrée peuvent provoquer de grandes oscillations inattendues en sortie. Les méthodes de contrôle traditionnelles supposent que les concepteurs connaissent les équations régissant ce comportement et que les capteurs et actionneurs fonctionnent globalement comme prévu. En pratique, les composants vieillissent, deviennent bruyants ou sont remplacés par du matériel légèrement différent. Les contrôleurs tolérants aux pannes conventionnels ouvrent soit des marges de sécurité fixes (méthodes passives), soit s’appuient sur des modèles précis pour détecter et accommoder les défauts (méthodes actives). Les deux approches peinent lorsque le système évolue au fil du temps ou que son fonctionnement interne n’est pas entièrement connu. Les auteurs soutiennent que l’industrie a besoin de contrôleurs qui apprennent à partir de données en temps réel, détectent quand capteurs ou actionneurs se comportent mal et corrigent ces défauts en temps réel sans nécessiter un plan détaillé du système.
Un contrôleur apprenant qui traite le système comme une boîte noire
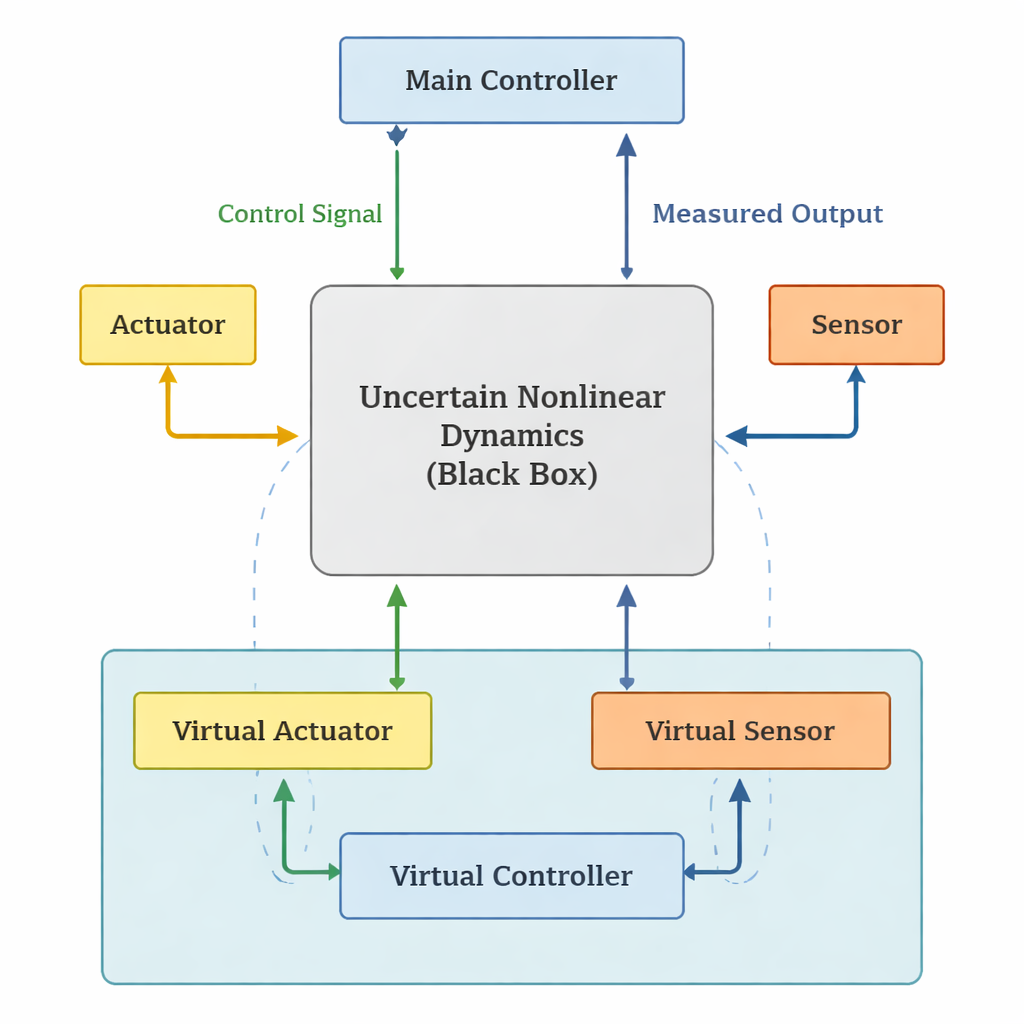
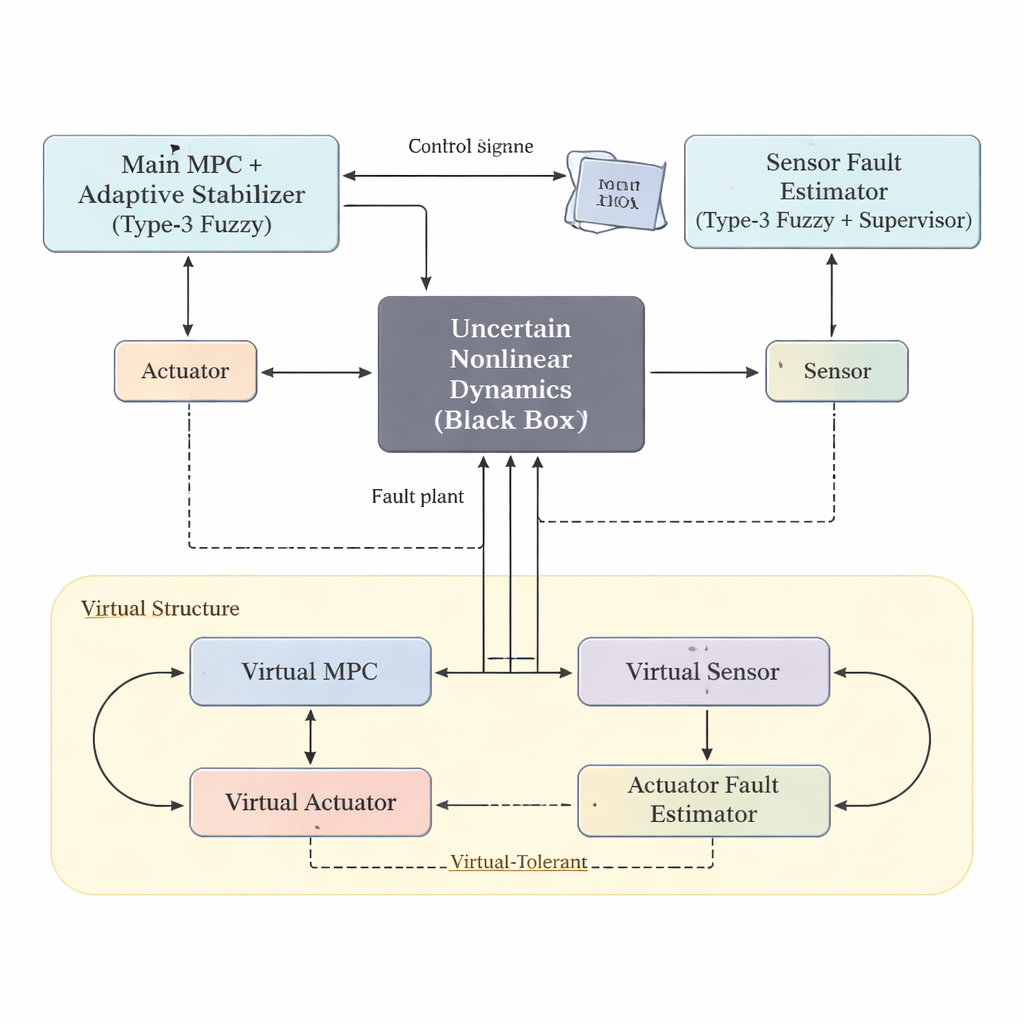
Le cadre proposé considère la plante purement comme une boîte noire : il ne voit que les signaux de commande envoyés et les sorties mesurées par les capteurs. Au cœur du dispositif se trouve un système de logique floue de type 3, une forme avancée de modélisation floue conçue pour gérer une forte incertitude et le bruit de mesure. Ce système flou apprend en ligne une description compacte entrée–sortie des dynamiques inconnues, tandis qu’un contrôleur prédictif basé sur un modèle (MPC) utilise ce modèle appris pour planifier les actions de commande futures sur un horizon court. Une unité adaptative de stabilisation fonctionne en parallèle, garantissant que, même si le modèle est imparfait ou que des paramètres dérivent, la rétroaction combinée maintient les erreurs de suivi bornées et les pousse finalement vers zéro.
Surveiller les surveillants : détection des défauts de capteurs et d’actionneurs
Le cadre répartit la gestion des fautes en deux volets coordonnés. D’abord, une unité de détection des pannes de capteur utilise deux estimateurs flous de type 3 supplémentaires ainsi qu’un bloc de supervision pour inférer dans quelle mesure une lecture de capteur s’est écartée de sa valeur d’équilibre attendue. À partir de cela, elle génère un signal correctif qui « contre-biais » efficacement la mesure défectueuse afin que le contrôleur principal continue de voir une sortie fiable. Ensuite, la méthode construit une structure virtuelle qui reflète le système réel : elle comprend un capteur virtuel, un actionneur virtuel, son propre identificateur flou et un MPC virtuel. Parce que la boucle virtuelle n’est pas affectée par la dégradation de l’actionneur réel, les différences entre les chemins de commande virtuel et réel révèlent l’ampleur de la défaillance de l’actionneur réel. Une formule simple transforme cet écart en un niveau de défaut estimé, qui est ensuite compensé dans le signal de commande principal.
Prouver la stabilité et tester sur des robots et des réacteurs chimiques
Pour montrer que l’approche est non seulement intuitive mais aussi mathématiquement fondée, les auteurs construisent une fonction de Lyapunov — une sorte de mesure d’énergie — qui inclut les erreurs de suivi, les erreurs de modélisation et les paramètres flous ajustables. Ils dérivent des lois d’actualisation pour les termes adaptatifs de sorte que cette énergie décroisse toujours, démontrant que les erreurs diminuent au fil du temps même en présence de perturbations et de défauts. Des simulations testent ensuite la méthode sur deux exemples très différents : un bras robotique à articulation unique et un processus de neutralisation du pH dans une cuve chimique. Dans les deux cas, les dynamiques réelles sont traitées comme complètement inconnues, les paramètres varient et des défauts de capteur et d’actionneur sont injectés pendant le fonctionnement. Le contrôleur maintient un suivi précis, apprend rapidement l’ampleur des défauts et garde les risques et mesures d’erreur faibles, surpassant des contrôleurs flous plus simples et d’autres schémas tolérants aux pannes avancés issus de la littérature.
Ce que cela signifie pour les systèmes réels
Pour les non-spécialistes, le message clé est que cette méthode confère aux systèmes complexes une forme de conscience intégrée. Plutôt que de s’appuyer sur un modèle parfait ou un réglage manuel par des ingénieurs, le contrôleur apprend en continu à partir des données qu’il observe, détecte quand les capteurs ou actionneurs commencent à tromper ou à s’affaiblir, et corrige automatiquement ses actions pour maintenir des performances stables. Parce qu’il n’a besoin que de données d’entrée et de sortie, il peut, en principe, être appliqué à de nombreuses machines différentes sans tout redessiner. Bien que les résultats reposent sur des simulations et que des questions matérielles restent à explorer, ce travail oriente vers des robots, des procédés industriels et d’autres systèmes autonomes plus résilients, capables de rester fiables même lorsque leurs composants et environnements sont loin d’être idéaux.
Citation: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Mots-clés: contrôle tolérant aux pannes, logique floue, contrôle prédictif basé sur un modèle, défaillances de capteurs et d’actionneurs, systèmes non linéaires