Clear Sky Science · fr
Recherche sur une méthode de positionnement pour le tri de colis en logistique désordonnée
Pourquoi un tri de colis plus intelligent compte
Chaque commande en ligne déclenche une chorégraphie invisible de paquets dans d’immenses centres logistiques. Avant qu’un colis ne puisse prendre la route vers votre porte, il faut le repérer, le saisir, le mesurer, le scanner et le diriger — souvent depuis un tas chaotique de paquets mélangés. Aujourd’hui, une grande partie de cette étape initiale « démêler le chaos » repose encore sur des opérateurs humains qui effectuent des tâches répétitives et pénibles. Cet article présente une nouvelle méthode basée sur la vision qui aide les robots à localiser de façon fiable le point de préhension de chaque colis dans un enchevêtrement, rapprochant ainsi le tri de colis d’une automatisation plus rapide et moins exigeante en main‑d’œuvre.
Des tas désordonnés à des données exploitables par les robots
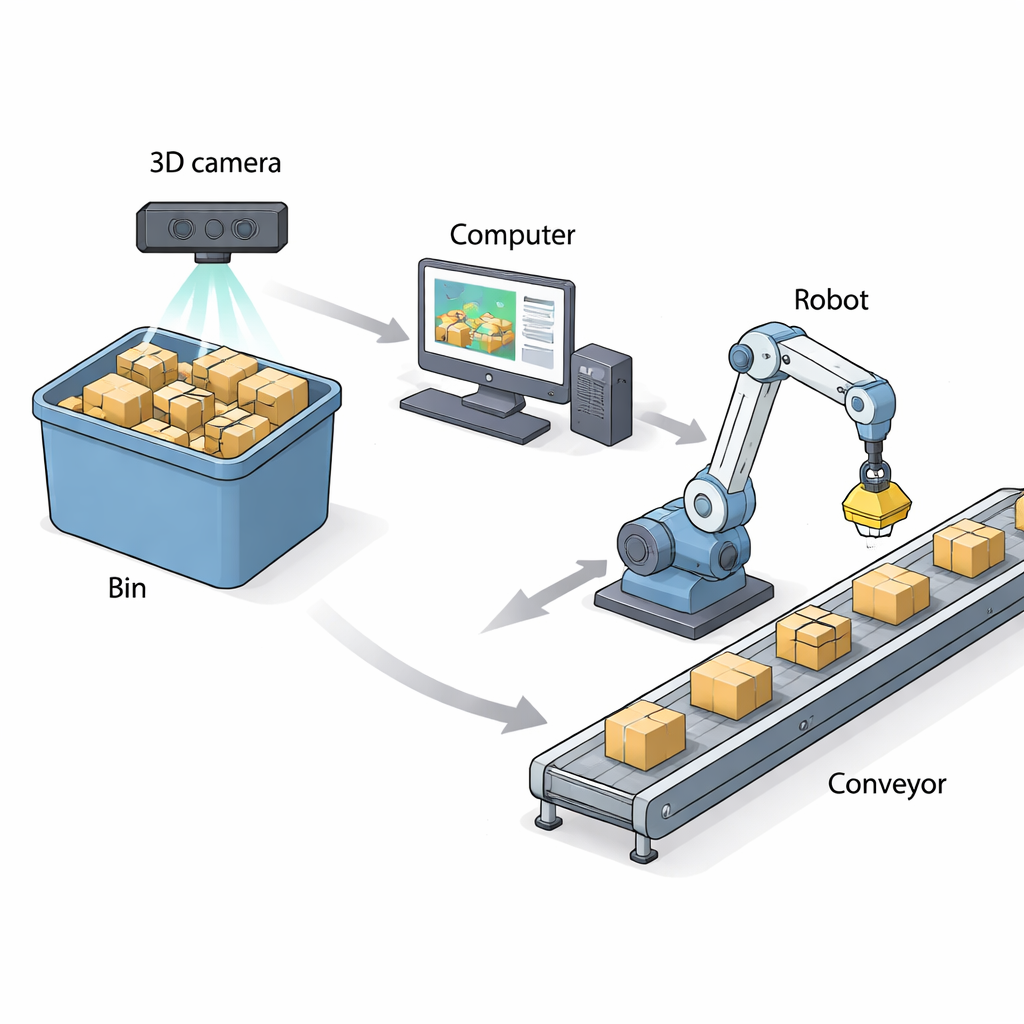
Les chercheurs s’intéressent à ce qu’ils appellent les colis de logistique « désordonnée » : des cartons et des enveloppes souples jetés dans des bacs sans ordre particulier, parfois écrasés ou déformés par empilement. Pour remplacer les opérateurs dans cet environnement encombré, un robot doit d’abord savoir exactement où atteindre et comment orienter sa pince sur la surface du colis ciblé. L’équipe a construit un système autour d’une caméra 3D qui capture à la fois une image couleur et une carte de profondeur de la couche supérieure des colis. Un réseau de reconnaissance moderne (basé sur YOLOv8) détecte les colis individuels dans l’image couleur, tandis que la carte de profondeur révèle leur forme tridimensionnelle. Cette combinaison permet à l’ordinateur de choisir le meilleur colis à saisir ensuite — un colis peu occulté et suffisamment éloigné des bords du bac — avant de calculer un point de préhension précis.
Trouver un point de préhension stable avec trois points et une ombre
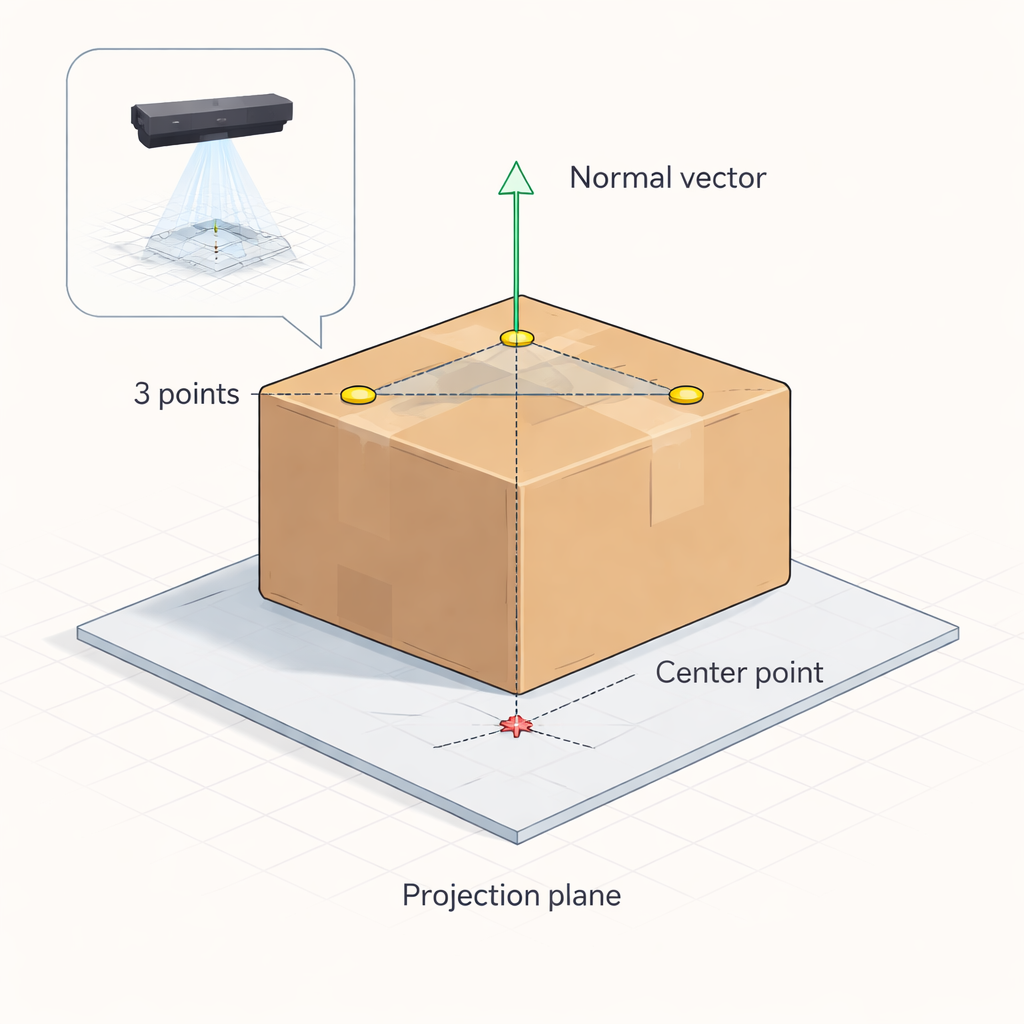
Le noyau de la méthode repose sur un tour géométrique que les auteurs appellent un algorithme de centrage orientation‑projection à trois points. Une fois un colis ciblé, le système sélectionne aléatoirement trois points sur sa surface supérieure à partir des données de profondeur. Ces trois points définissent un plan, de la même façon que trois clous plantés sur une table en définiraient l’inclinaison. À partir de ce plan, l’algorithme calcule une direction « normale » — une ligne droite perpendiculaire à la surface du colis. En parallèle, le système utilise les quatre coins supérieurs du colis dans l’image pour déduire le centre géométrique de sa projection, de manière analogue à la détermination du centre de l’ombre d’un rectangle. La combinaison de l’orientation du plan et de cette position centrale fournit un emplacement 3D de préhension précis et l’inclinaison de la face supérieure du colis, qui peuvent ensuite guider une ventouse ou une pince robotisée.
Gérer les colis écrasés et bombés
Les colis réels ne sont pas des blocs parfaits : les enveloppes à bulles s’affaissent, les sacs souples gonflent, et les cartons peuvent se déformer sous charge. Une hypothèse de surface plane simple échouerait dans ces cas. Pour y remédier, les auteurs étendent leur formalisme pour distinguer trois situations : colis quasiment plats, surfaces convexes (bombées) et surfaces concaves (affaissées). En comparant les valeurs de profondeur maximale et minimale sur la surface d’un colis, le système décide d’abord si celui‑ci est significativement déformé. Si c’est le cas, il analyse la manière dont la surface déformée intersecte un plan de référence imaginé et ajuste une ellipse approchée à cette intersection. À partir de là, il résout pour un plan « optimal » qui représente au mieux une surface de préhension stable — même si le sommet réel s’affaisse ou se bombe — puis projette le point de préhension clé sur ce plan.
Éprouver l’algorithme
Pour vérifier que les équations fonctionnent en pratique, l’équipe a construit un banc d’essai composé d’un robot industriel à six axes, d’une caméra 3D et d’un dispositif personnalisé laser‑et‑sonde. D’abord, ils ont marqué le véritable centre géométrique de la surface supérieure de chaque colis test et utilisé deux faisceaux lasers pour repérer physiquement cet emplacement dans l’espace. Ensuite, ils ont laissé leur algorithme de vision estimer ce même centre et commandé au robot de déplacer une seconde sonde vers le point calculé. En mesurant le léger décalage entre les deux pointes de sonde, ils ont pu calculer l’erreur de positionnement. Des tests sur des maquettes rigides en bois et sur des matériaux d’emballage réalistes — cartons ondulés, enveloppes à bulles et sacs plastiques, de dimensions allant jusqu’à 250×250 mm — ont montré une erreur maximale d’environ 1,7 millimètre et des erreurs moyennes proches de 1 millimètre par axe. Le calcul complet pour chaque colis prenait environ 17,5 millisecondes, assez rapide pour des lignes de tri à fort débit.
Ce que cela signifie pour les entrepôts de demain
En termes simples, l’étude démontre qu’un robot équipé d’une caméra 3D et de cet algorithme à trois points basé sur la projection peut déterminer de façon fiable où et comment saisir des colis dans un bac désordonné avec une précision de l’ordre du millimètre. Si de fortes déformations sur des colis très souples réduisent encore un peu la précision, la méthode reste suffisamment robuste pour des conditions d’entrepôt réalistes. Alors que les volumes de colis continuent d’augmenter et que les pénuries de main‑d’œuvre persistent, de tels algorithmes pourraient permettre des missions plus sûres et moins monotones en transférant aux machines les tâches de tri les plus lourdes et répétitives — tout en contribuant à maintenir le fonctionnement fluide du monde croissant du commerce en ligne.
Citation: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
Mots-clés: vision 3D, tri de colis, préhension robotique, automatisation logistique, localisation d'objets