Clear Sky Science · fr
Intégration d’un Swin-T simplifié avec un EFS‑Net modifié pour la segmentation guidée par attention des pipelines sous‑marins en environnements sous‑marins complexes
Pourquoi observer le fond marin compte
Cachés sous les vagues, d’immenses réseaux de tuyaux transportent le pétrole, le gaz et les câbles d’énergie dont dépendent les sociétés modernes. Si ces pipelines sous‑marins se fissurent, corrodent ou se déplacent, les conséquences peuvent être des arrêts coûteux et une pollution grave. Aujourd’hui, une grande partie des inspections est effectuée par des opérateurs humains qui scrutent des heures de vidéos troubles issues de robots sous‑marins. Cet article présente un nouveau système d’intelligence artificielle (IA) capable de repérer automatiquement les pipelines dans des images sous‑marines difficiles, même lorsque ceux‑ci sont peu visibles, recouverts de « neige marine » ou partiellement enfouis dans le sable. Ce progrès vers une inspection automatisée et fiable pourrait rendre l’énergie et les infrastructures offshore plus sûres et moins coûteuses à entretenir.
Voir clairement dans un monde trouble
Les images sous‑marines sont notoirement difficiles à interpréter pour les ordinateurs. La lumière s’atténue rapidement avec la profondeur, les couleurs tirent vers le vert et le bleu, et les particules en suspension créent un voile et des points semblables à de la neige. Les techniques classiques d’imagerie, qui reposent sur des contours nets et des contrastes propres, ont tendance à échouer lorsque le pipeline est recouvert de sable, masqué par la végétation ou flou à cause du brouillard. L’apprentissage profond a amélioré la situation, et plusieurs réseaux neuronaux populaires savent déjà détecter des tuyaux dans des jeux de données spécifiques. Pourtant, ces systèmes se spécialisent généralement dans un type de condition d’eau ou de caméra. Face à un nouvel environnement — eau, éclairage ou arrière‑plan différents — leur précision chute fortement. Le défi central est de concevoir un modèle à la fois précis et adaptable, tout en restant suffisamment efficace pour être utilisé dans des systèmes d’inspection réels.
Une approche à deux cerveaux pour les images sous‑marines
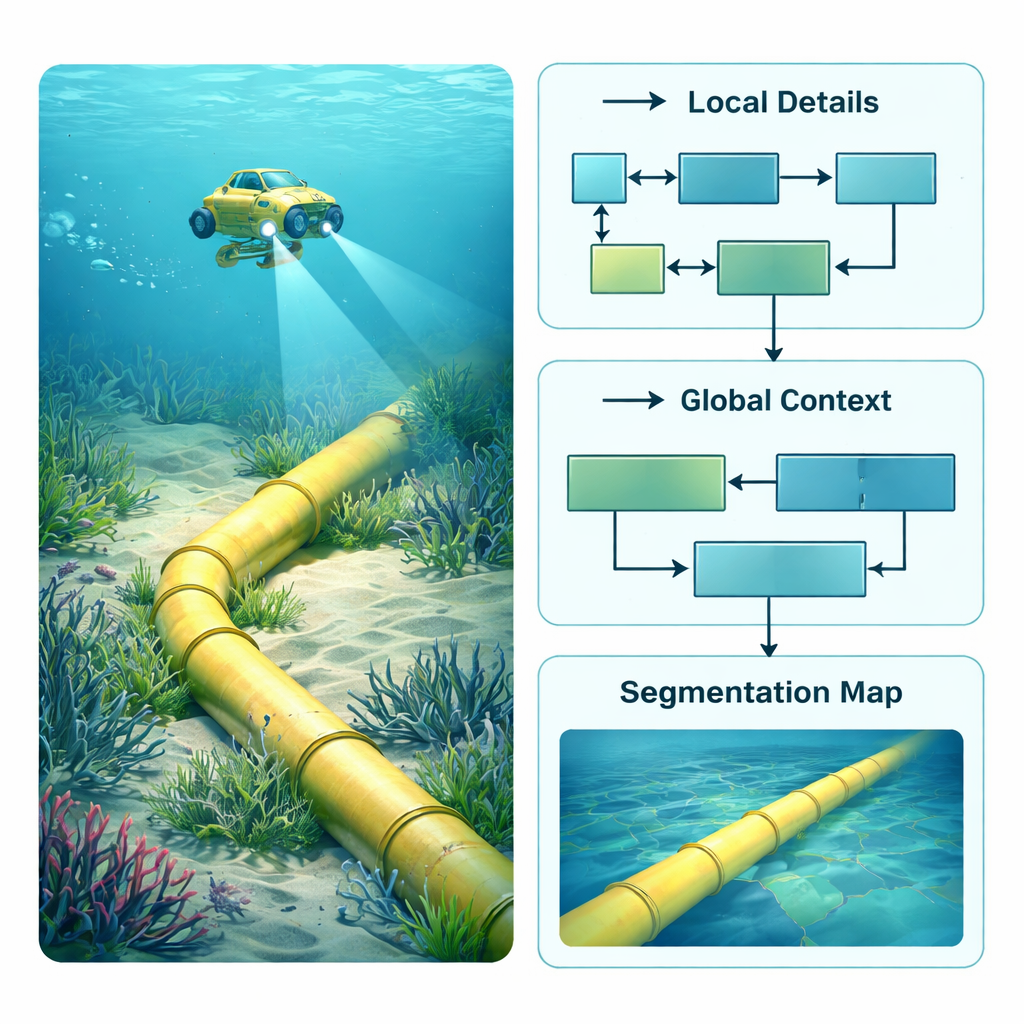
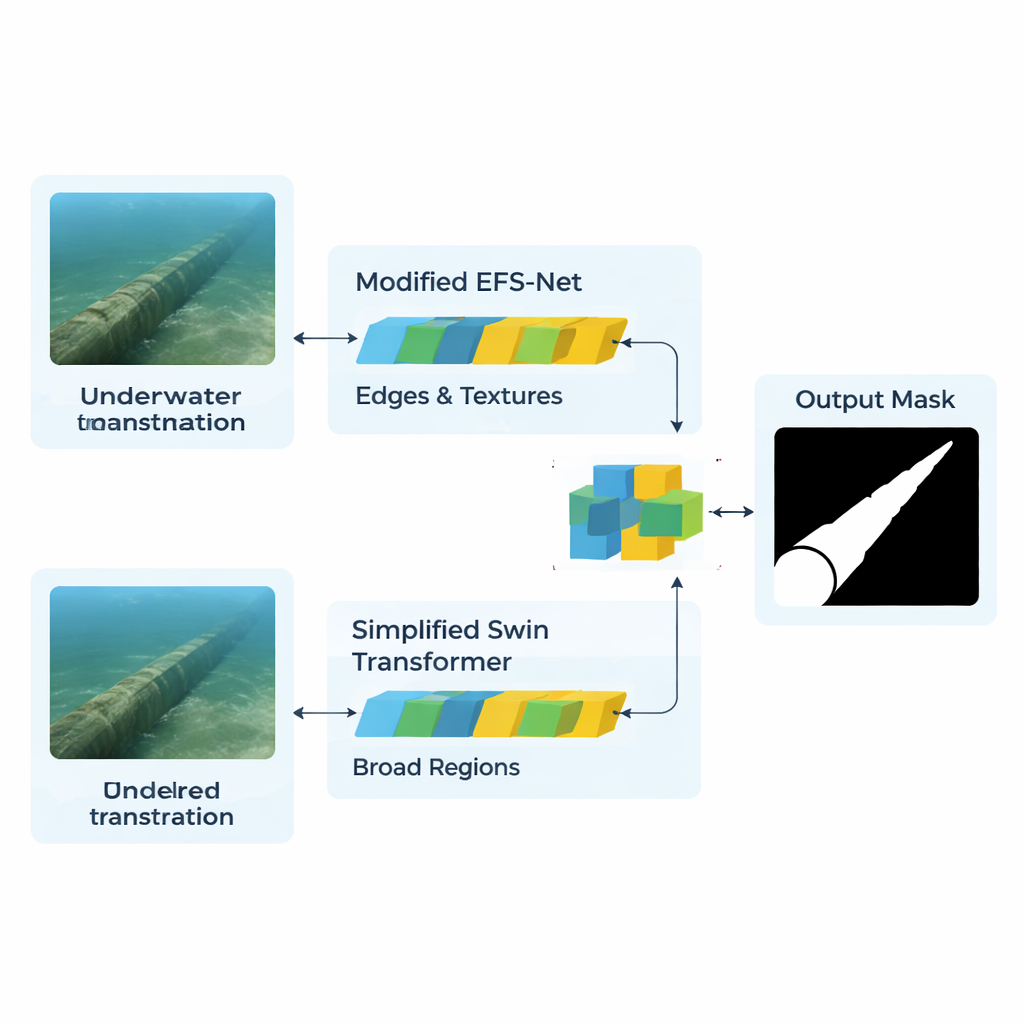
Les auteurs abordent ce problème en construisant une architecture IA hybride qui combine deux « façons de voir » très différentes. Une branche, basée sur une version allégée du Swin Transformer, joue le rôle d’observateur grand angle. Elle balaye l’ensemble de l’image pour comprendre les motifs à grande échelle, comme la trajectoire globale d’un tuyau sur le fond marin. La seconde branche, adaptée d’un modèle appelé EFS‑Net et soutenue par un backbone EfficientNet, fonctionne comme une loupe. Elle se concentre sur les détails fins — contours, textures et structures minces qui révèlent où commence le pipeline et où s’achève le sable ou la végétation. Les deux branches traitent les mêmes images redimensionnées et les convertissent en cartes de caractéristiques internes qui décrivent ce que le réseau estime être des structures significatives dans chaque région de l’image.
Laisser l’attention décider de ce qui compte
Empiler simplement les sorties de ces deux branches créerait un enchevêtrement d’informations redondantes. À la place, le modèle utilise un mécanisme d’« attention » pour décider, pixel par pixel, quels détails méritent d’être pris en compte. Un module de cross‑attention à trois têtes compare les caractéristiques issues de la branche axée sur les détails avec celles de la branche axée sur le contexte. En substance, la branche des détails pose des questions ciblées — « Ce contour fait‑il partie d’un pipeline ? » — tandis que la branche de contexte fournit des indices globaux — « Une ligne à cette position et dans cette direction a‑t‑elle du sens comme élément de pipe ? ». Une étape de raffinage supplémentaire, appelée CBAM, renforce encore le signal provenant des régions susceptibles d’être des pipelines et atténue le bruit de fond tel que les rochers, les algues ou les particules en suspension. Un réseau décodeur reconstruit ensuite progressivement un masque en pleine taille qui marque chaque pixel comme appartenant ou non à un pipeline.
Mettre le système à l’épreuve
Pour évaluer si cette conception fonctionne en pratique, les chercheurs ont assemblé un vaste jeu de données exigeant nommé HOMOMO. Il contient plus de 120 000 images couleur de pipelines réels prises le long de 1,2 kilomètre de tuyauterie dans des conditions variées et souvent hostiles : faible luminosité, brouillard marin, « neige » en suspension, dérives de sable et forte végétation. Ils ont entraîné leur modèle sur une partie de cette collection puis l’ont comparé à des systèmes largement utilisés tels que UNet, DeepLab, SwinUNet, TransUNet, Mask2Former et plusieurs versions du détecteur d’objets YOLO. Sur HOMOMO, leur modèle hybride a segmenté correctement les pixels de pipeline avec un indice moyen d’intersection sur union d’environ 98 %, nettement supérieur à la meilleure méthode concurrente. Tout aussi important, lorsqu’il a été testé — sans réentraînement — sur deux sources d’images très différentes, un jeu de données synthétique Roboflow et des séquences réelles extraites de YouTube, le modèle a conservé de bonnes performances, montrant sa capacité à faire face à de nouvelles caméras et conditions d’eau.
Ce que cela signifie pour l’océan réel
Pour les non‑spécialistes, la conclusion est que ce système d’IA peut tracer de manière fiable les contours des pipelines sous‑marins dans des images vidéo trop bruyantes et incohérentes pour les méthodes conventionnelles. En associant une vue globale de la scène à un œil affûté pour les contours et les textures, et en utilisant l’attention pour fusionner ces perspectives, le modèle atteint une grande précision sans exiger une puissance de calcul massive. En termes pratiques, un tel outil pourrait aider des robots autonomes à surveiller en continu de longues sections d’infrastructures sous‑marines, signalant d’éventuels dommages ou enfouissements pour examen humain. S’il éprouve encore des difficultés avec des tuyaux extrêmement fins ou complètement dissimulés, l’approche constitue une étape importante vers une inspection plus sûre et plus automatisée de la plomberie cachée qui soutient les réseaux modernes d’énergie et de communication.
Citation: Hosseini, N., Mohanna, F. & Moghimi, M.K. Integrating simplified Swin-T with modified EFS-Net for attention-guided underwater pipelines segmentation in complex underwater environments. Sci Rep 16, 6987 (2026). https://doi.org/10.1038/s41598-026-38081-x
Mots-clés: pipelines sous‑marins, segmentation d’image, apprentissage profond, inspection marine, réseaux transformeurs