Clear Sky Science · fr
Solutions à intégrale carrée et stabilité d’une équation integro-différentielle stochastique du second ordre
Pourquoi le passé et l’aléa comptent pour les systèmes conçus
De nombreux dispositifs modernes — des bras robotisés flexibles aux ponts munis d’amortisseurs de vibrations — ne réagissent pas seulement à l’état présent. Leur mouvement est modelé par des déplacements passés, des signaux capteurs retardés et des vibrations aléatoires toujours présentes dans l’environnement. Cet article pose une question fondamentale pour de tels systèmes : même lorsqu’ils sont soumis au bruit et se souviennent de leur passé, peut‑on garantir que leurs mouvements restent maîtrisés au lieu de croître indéfiniment ?
Une nouvelle manière de suivre des systèmes bruités avec mémoire
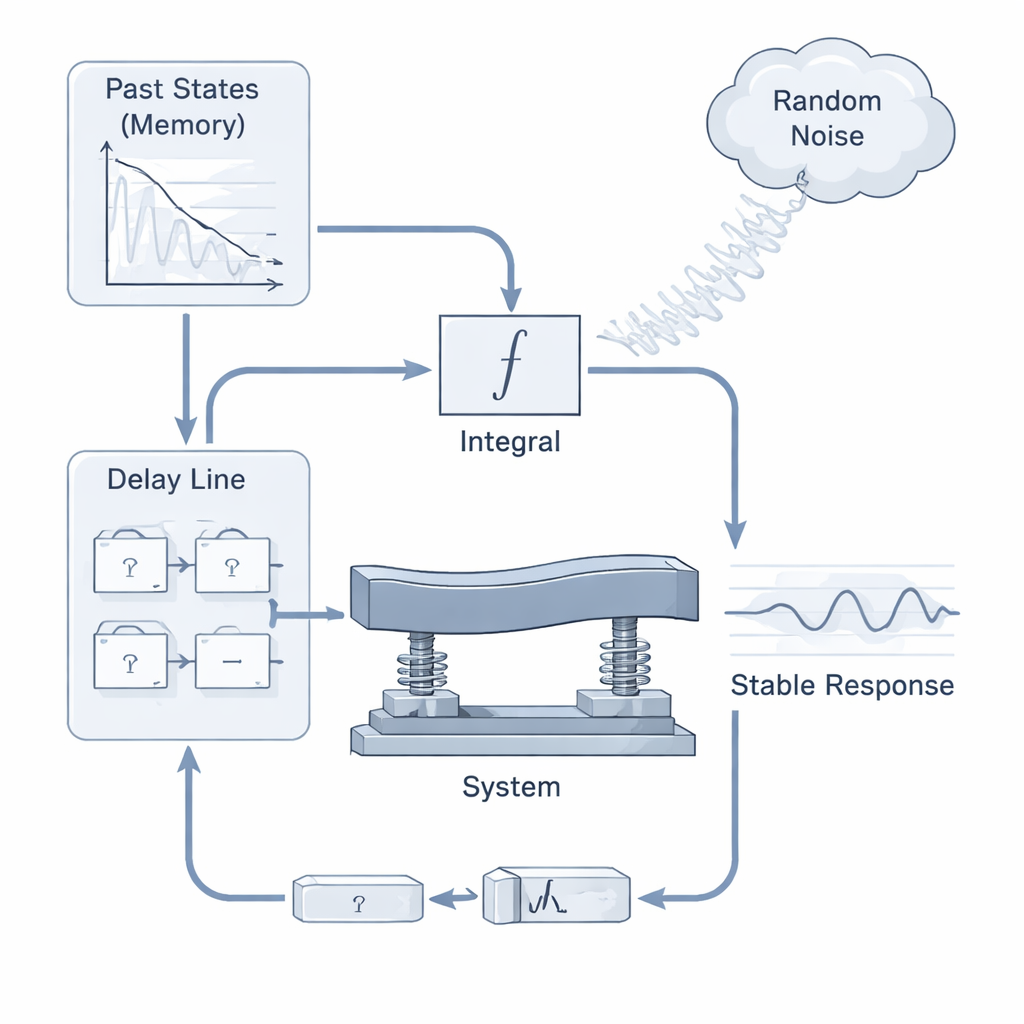
Les auteurs étudient une large famille de modèles mathématiques appelés équations integro-différentielles stochastiques du second ordre avec retard. En termes simples, ces équations décrivent comment une grandeur, telle que un déplacement, évolue lorsqu’elle dépend de sa position et de sa vitesse actuelles, de son histoire dans le temps, d’un retour d’information retardé et de fluctuations aléatoires. Ce type de description est naturel pour les matériaux viscoélastiques, les absorbeurs de vibrations et les systèmes mécaniques ou mécatroniques à commande en rétroaction. Une difficulté clé est que les outils traditionnels traitent souvent une seule complication à la fois — soit l’aléa, soit les retards, soit la mémoire — mais rarement les trois ensemble. Ici, les auteurs conçoivent un outil d’analyse plus puissant, un fonctionnel de Lyapunov–Krasovskii, construit avec soin pour capturer l’effet combiné du bruit, des retards variables et des termes de mémoire.
Maintenir le mouvement borné malgré retards et bruit
À l’aide de ce nouveau fonctionnel, l’article énonce des conditions sous lesquelles les systèmes modélisés se comportent correctement à long terme. Plus précisément, les auteurs montrent que, si l’on impose certaines limites naturelles sur l’intensité du retour d’information, de l’amortissement et des effets de mémoire, alors toute solution reste bornée au cours du temps. De plus, l’état du système tend, au sens stochastique, à se rapprocher d’une position de repos : les perturbations aléatoires peuvent provoquer des oscillations transitoires, mais celles‑ci ne s’accumulent pas en un mouvement incontrôlé. Cette propriété s’appelle la stabilité asymptotique stochastique. Les conditions sont exprimées par de simples inégalités portant sur les coefficients qui décrivent l’amortissement, la raideur, l’amplitude des retards et l’intensité du bruit aléatoire. Les ingénieurs peuvent, en principe, utiliser ces inégalités comme lignes directrices de conception pour assurer un fonctionnement sûr.
Mouvement à intégrale quadratique et contrôle de l’énergie
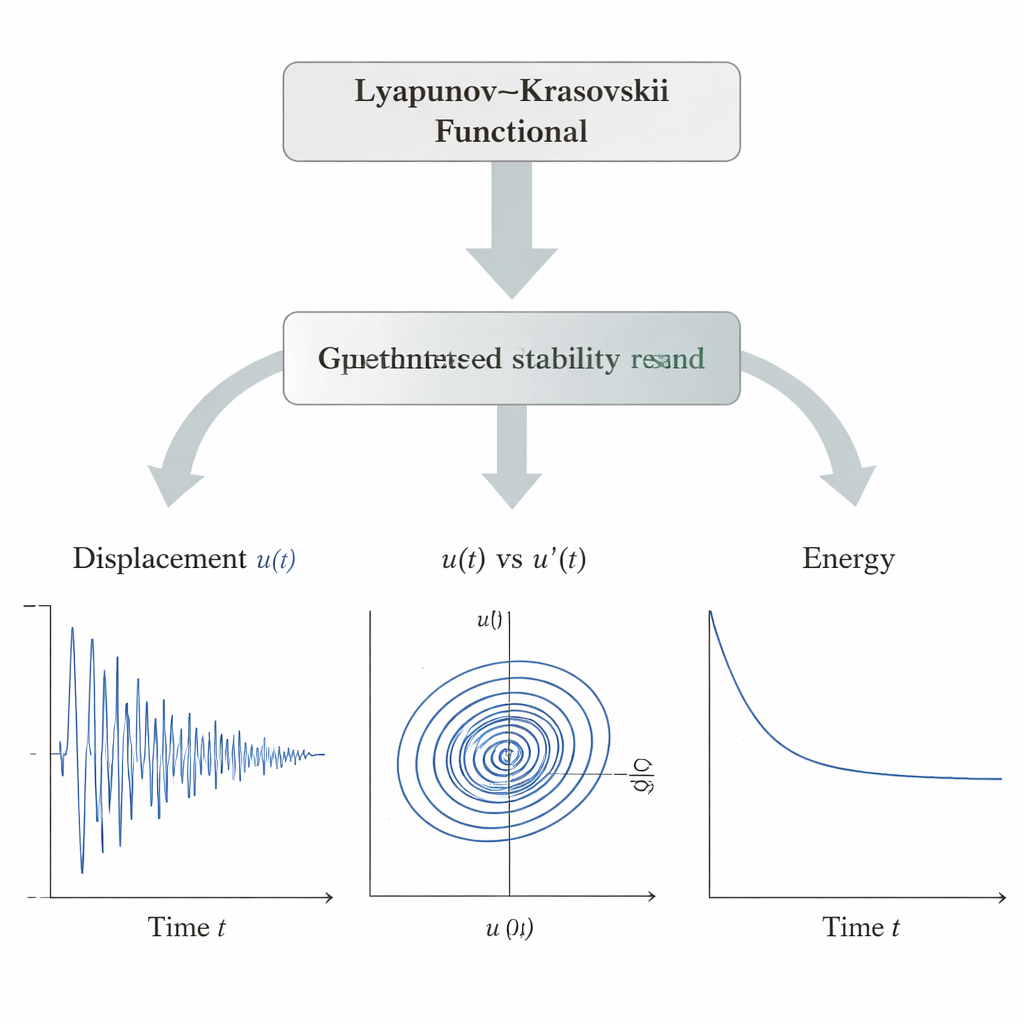
Au‑delà de la simple bornitude des trajectoires, les auteurs établissent une propriété plus forte impliquant ce qu’ils appellent l’intégrabilité au carré. Dit plus familièrement, cela signifie que si l’on considère l’énergie totale accumulée du système — construite à partir du carré du déplacement et du carré de sa vitesse — cette quantité reste finie sur l’ensemble de l’avenir. Une énergie accumulée finie implique que, en moyenne, les oscillations doivent s’éteindre plutôt que persister indéfiniment. Mathématiquement, cela se démontre en montrant que le fonctionnel de Lyapunov–Krasovskii décroît le long des trajectoires du système suffisamment rapidement pour que l’intégrale du mouvement au carré converge. Ce résultat relie le fonctionnel abstrait à une grandeur physiquement significative, analogue à une énergie.
Mettre la théorie à l’épreuve par des simulations
Pour illustrer les résultats abstraits, les auteurs simulent deux systèmes modèles détaillés qui entrent dans leur cadre général. En combinant la méthode d’Euler–Maruyama pour la partie aléatoire et des quadratures numériques pour les intégrales de mémoire, ils génèrent des trajectoires exemples au cours du temps. Les déplacements simulés présentent une phase transitoire initiale avec des oscillations aléatoires visibles, puis se stabilisent en de petites fluctuations bornées autour de l’état de repos. Les diagrammes de phase montrent des courbes en spirale restées confinéess dans une région limitée, et les courbes d’énergie calculées décroissent puis demeurent bornées. Ces expériences numériques confirment que les conditions théoriques de stabilité et d’intégrabilité au carré prédisent bien un comportement réaliste et bien maîtrisé, même en présence de retards et de forces aléatoires.
Ce que cela signifie pour les systèmes réels
Pour un lecteur non spécialiste, le message principal est que l’article propose une manière rigoureuse de certifier que des systèmes complexes, soumis à des retards et au bruit, ne vont pas dégénérer en comportements incontrôlables. En construisant une nouvelle mesure analogue à une énergie qui prend en compte à la fois la mémoire et l’aléa, les auteurs montrent quand les oscillations restent bornées et quand leur énergie globale reste finie. Cela fait progresser les fondements mathématiques de la conception d’appareils de contrôle des vibrations, de structures mécaniques flexibles et d’autres technologies où les retours retardés et les perturbations aléatoires sont inévitables. Les mêmes idées pourraient inspirer des travaux futurs dans des domaines aussi variés que la régulation biologique, la dynamique économique et le contrôle en réseau, partout où le passé et le hasard façonnent conjointement l’évolution d’un système.
Citation: Oudjedi-Damerdji, L.F., Meziane, M., Djidel, O. et al. Square integrable solutions and stability of a second-order stochastic integro-differential equation. Sci Rep 16, 7158 (2026). https://doi.org/10.1038/s41598-026-37970-5
Mots-clés: stabilité stochastique, équations différentielles à retard, méthodes de Lyapunov, systèmes integro-différentiels, contrôle des vibrations