Clear Sky Science · fr
Analyse reconfigurable et optimisation de l’espace de travail d’un robot parallèle modulaire suspendu par câbles
Des robots qui se déplacent sur des rails invisibles
Imaginez un robot capable de faire glisser une caméra lourde à travers un stade, de soulever des matériaux sur un chantier ou de guider un appareil de rééducation autour d’un patient, tout cela en étant suspendu à des câbles plutôt qu’installé sur des bras rigides. Cet article présente un nouveau type de robot suspendu par câbles dont la structure peut être remodelée à la demande, permettant à une même machine de s’adapter à de nombreuses tâches tout en exploitant au mieux les mouvements utiles de son espace de travail.
Construire un robot à partir de pièces interchangeables
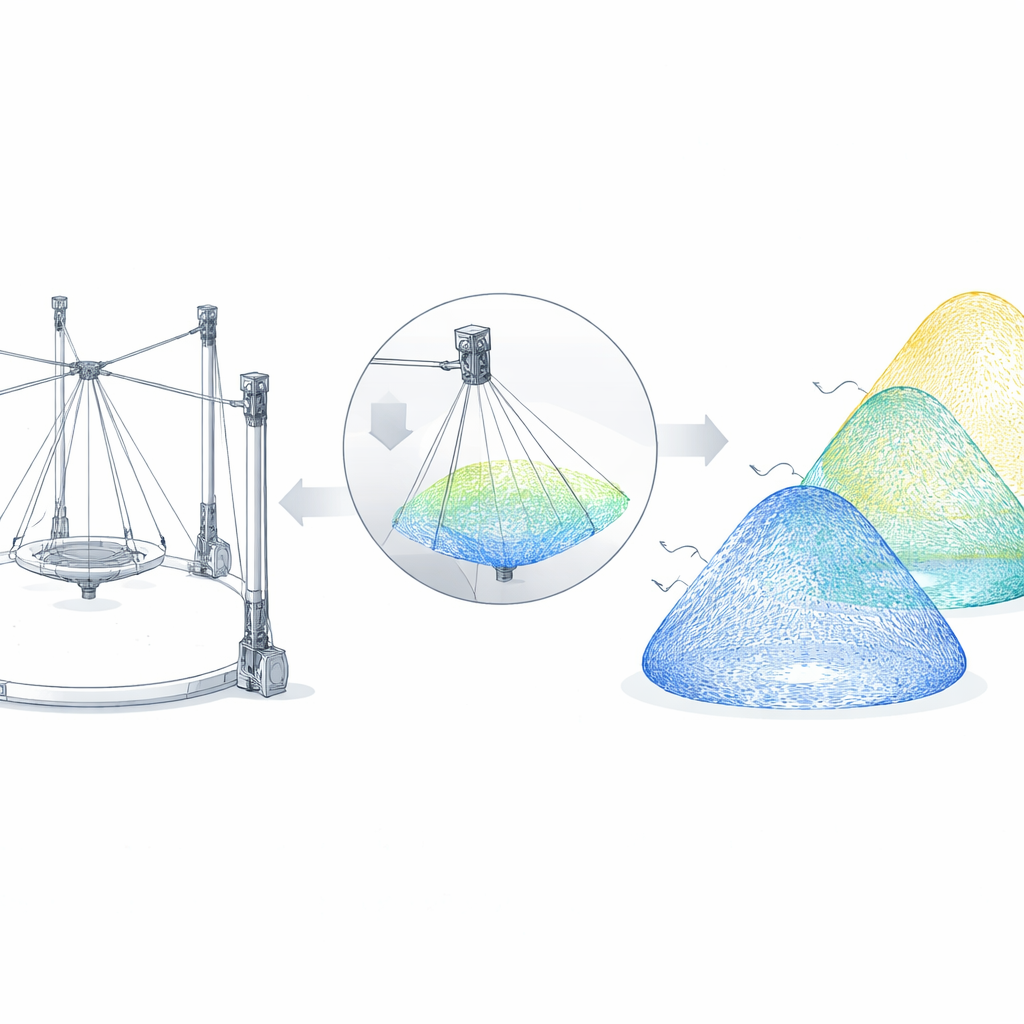
Au cœur de l’étude se trouve un robot parallèle suspendu par câbles modulaire (MCSPR). Plutôt que des bras métalliques fixes, il utilise jusqu’à six « branches » identiques, chacune constituée d’une tour avec des moteurs, des poulies et un câble relié à une plate‑forme mobile centrale, appelée effecteur final. Ces branches sont disposées autour d’un guidage circulaire et peuvent être ajoutées, retirées, pivotées ou élevées et abaissées. En les réarrangeant, le même matériel peut se comporter comme plusieurs robots différents : avec deux branches il se déplace dans un plan, avec trois ou quatre il se déplace librement dans l’espace, et avec cinq ou six il peut en outre incliner et faire tourner la plate‑forme dans plusieurs directions.

Planifier l’ossature d’une machine qui change de forme
Concevoir un système aussi flexible ne revient pas à simplement boulonner des pièces entre elles. Les auteurs utilisent une approche systématique de « synthèse structurale », traitant chaque câble, poulie et articulation comme un élément de base d’un réseau. À l’aide de diagrammes de type graphe, ils cartographient la manière dont ces éléments se connectent afin que la plate‑forme possède les libertés de mouvement souhaitées — par exemple se déplacer selon trois axes ou pivoter autour d’eux. Ce catalogue de modules et de connexions sert de boîte à outils de conception : selon le mouvement requis par une tâche, un concepteur peut choisir le nombre de branches à utiliser et leur placement sur la voie circulaire, en ayant la confiance que la structure résultante se comportera comme prévu.
Savoir dans quelle direction la plate‑forme va bouger
Puisque la plate‑forme est suspendue à des câbles qui ne peuvent que tirer et non pousser, prédire son mouvement est plus complexe que pour des robots traditionnels. L’équipe élabore une description mathématique unifiée qui s’applique à toutes les cinq configurations principales du MCSPR. Pour une position et une orientation désirées de la plate‑forme, ils calculent précisément la longueur de chaque câble et la vitesse de variation de cette longueur. Ils construisent ensuite un prototype physique et commandent la plate‑forme pour qu’elle suive une trajectoire hélicoïdale lisse dans l’espace. Des capteurs le long des câbles enregistrent les mouvements réels, qui correspondent étroitement aux prédictions. Cela confirme que le modèle peut diriger le robot de façon fiable même lorsque sa géométrie est reconfigurée.
Déterminer où le robot peut rester stable
Il est tout aussi important de savoir où la plate‑forme suspendue peut rester en équilibre. Si un câble se relâche, le contrôle est perdu. Les auteurs se concentrent sur ce qu’ils appellent l’espace de travail d’équilibre statique : la région de l’espace où tous les câbles peuvent rester en tension positive sous l’action exclusive de la gravité. À l’aide d’une approche Monte‑Carlo, ils échantillonnent aléatoirement de nombreuses positions et orientations possibles de la plate‑forme et vérifient, pour chacune, si les tensions de câble nécessaires pour maintenir cette pose sont toutes dans des limites sûres. Les échantillons acceptés forment un nuage tridimensionnel qui délimite le volume de travail disponible pour le robot.
Élargir la portée du robot par un réglage intelligent
Parce que les branches du MCSPR peuvent modifier leur hauteur et leur angle, et que la plate‑forme peut porter des charges de masses et d’inclinaisons variées, la taille et la forme de ce volume sûr ne sont pas fixes. Les chercheurs font varier systématiquement ces facteurs dans une configuration à six branches. Ils montrent qu’une charge utile plus lourde réduit fortement la région où le robot peut rester stable, tandis que des choix judicieux de hauteurs de branches et d’espacement angulaire peuvent l’agrandir. Ils posent ensuite un problème d’optimisation : ajuster la charge, les hauteurs des branches, leurs angles et la plage d’inclinaison de la plate‑forme pour maximiser le volume d’espace de travail sûr. En exécutant cette recherche par logiciel, ils trouvent une configuration dans laquelle l’espace atteignable et en équilibre est plusieurs fois plus grand que dans une disposition naïve.
Pourquoi cela compte pour les applications réelles
Pour un non‑spécialiste, le message essentiel est que ce robot peut être remodelé presque comme un kit de construction, tout en pouvant être analysé et réglé avec précision. En combinant du matériel modulaire avec une planification mathématique rigoureuse et une recherche assistée par ordinateur, les auteurs transforment une unique machine suspendue par câbles en une plate‑forme polyvalente pouvant être adaptée à de nombreuses tâches — de la fabrication de précision à la rééducation — tout en optimisant son espace d’exploitation et en maintenant la sécurité du portage des charges.
Citation: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Mots-clés: robots à câbles, robotique modulaire, mécanismes reconfigurables, espace de travail du robot, manipulateurs parallèles