Clear Sky Science · fr
Reconnaissance basée sur MLS et extraction de paramètres des boulons/câbles de toitures routières à partir de nuages de points 3D
Maintenir les tunnels miniers en sécurité
Les mines de charbon profondes s’appuient sur des boulons et des câbles métalliques forés dans la voûte du tunnel pour empêcher l’effondrement de la roche. Si ces éléments de soutènement sont mal placés ou commencent à défaillir, la vie des travailleurs est en danger. Pourtant, aujourd’hui, le contrôle de milliers de boulons se fait encore en grande partie manuellement, à l’aide de rubans à mesurer et de jauges, dans des galeries sombres et poussiéreuses. Cette étude présente une méthode automatisée pour « voir » et mesurer ces lignes de vie cachées à l’aide de scanners laser mobiles et de données 3D, promettant des contrôles de sécurité plus rapides et plus objectifs pour les mines modernes.
Scanner un tunnel en trois dimensions
Les chercheurs ont développé un système portable de scannage laser mobile conçu spécifiquement pour les voies souterraines. Équipé d’un télémètre laser et de capteurs de mouvement, l’appareil est porté ou poussé le long du tunnel, en émettant rapidement des impulsions laser vers la roche environnante. Au fur et à mesure du déplacement, une technique de navigation appelée SLAM (Simultaneous Localization and Mapping) assemble les mesures entrantes en un modèle 3D continu du tunnel. Même sans signaux GPS, qui n’atteignent pas les souterrains, le système peut reconstruire la forme d’un tronçon de voie de 50 mètres avec une précision au centimètre, capturant non seulement les surfaces rocheuses mais aussi le matériel de soutènement comme les boulons, les câbles et les plaques d’acier.
Nettoyer le tunnel numérique
Les scans 3D bruts d’une mine sont désordonnés. La poussière, la brume d’eau, les travailleurs et les machines génèrent des points parasites qui encombrent les données. L’équipe applique d’abord un processus de débruitage en deux étapes qui élimine les valeurs aberrantes évidentes tout en récupérant les surfaces réelles qui auraient pu être rejetées à tort. Ils isolent ensuite uniquement la voûte du tunnel, car c’est là que sont ancrés les boulons et les câbles de soutien. En faisant tourner mathématiquement les données, ils alignent la voûte pour qu’elle soit aplatie dans une orientation standard, ce qui facilite la compréhension du « haut » et du « bas » et permet de mesurer de manière cohérente la direction et la longueur de chaque élément de soutien sur l’ensemble de la scène.
Laisser un tissu virtuel trouver les boulons
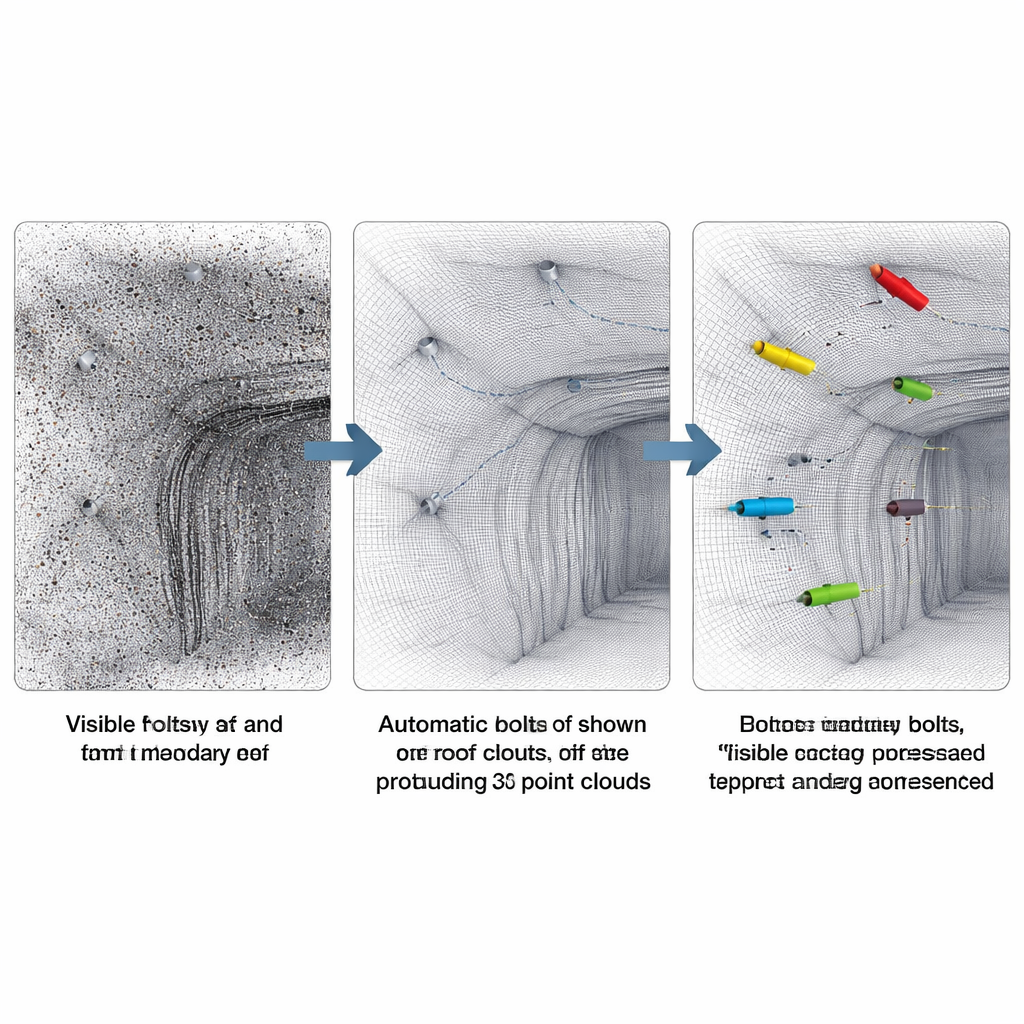
Pour séparer la surface de la voûte du matériel qui y est fixé, les chercheurs utilisent une astuce ingénieuse connue sous le nom de Cloth Simulation Filter. Ils imaginent une feuille souple de tissu qui se laisse doucement tomber sous l’effet de la gravité sur la voûte numérique inversée. Là où se trouve la vraie roche, le tissu épouse la surface. Lorsqu’un boulon, un câble ou une plaque dépasse, le tissu se drape par-dessus, laissant un creux. En mesurant la petite différence de hauteur entre le tissu et les points réels, l’algorithme étiquette les points appartenant à la voûte rocheuse lisse et ceux qui sont vraisemblablement des objets saillants. Des réglages soigneusement affinés assurent que le tissu est suffisamment détaillé pour suivre les irrégularités naturelles de la voûte, sans être si fin qu’il « engloutisse » accidentellement les boulons qu’il est censé révéler.
Apprendre à l’ordinateur à compter et mesurer les soutènements
Une fois les saillies potentielles isolées, la méthode doit encore décider quels amas de points correspondent à de vrais boulons ou câbles et lesquels sont des tuyaux, des fils pendants ou du bruit. Ici, une technique de regroupement basée sur la densité regroupe les points voisins formant des formes allongées. L’algorithme ajuste son rayon de recherche et sa taille minimale de cluster afin que chaque boulon devienne typiquement un groupe propre, sans fusionner les voisins. Pour chaque groupe, une analyse géométrique simple trouve l’axe principal de l’objet et projette tous les points sur celui-ci, fournissant une estimation de la longueur exposée et de l’angle d’inclinaison. Des règles supplémentaires basées sur la conception minière connue — comme l’espacement typique, le diamètre attendu et l’angle d’installation admissible — aident à filtrer les imposteurs et à ne retenir que les soutènements véritables et correctement installés.
Des cartes 3D à des informations pratiques sur la sécurité
La méthode a été testée dans une mine de charbon profonde en Mongolie intérieure, sur cinq segments de voûte consécutifs contenant 127 boulons et câbles qui avaient été soigneusement étiquetés à la main. Le système automatisé en a correctement identifié 118, avec seulement quelques omissions et faux positifs, même dans des conditions difficiles avec poussière, couverture partielle en béton projeté et pièces métalliques interférentes. Tout aussi important, il a produit une base de données structurée pour chaque soutènement : son emplacement exact, son espacement, la longueur dépassant de la voûte et l’angle par rapport à la roche. Pour les ingénieurs de la mine, cela transforme un nuage de points 3D complexe en une liste de contrôle prête à l’emploi pour la gestion de la qualité et le suivi de l’état à long terme. Bien que l’approche dépende encore de la qualité des données de scan et du fait qu’au moins une partie de chaque boulon soit visible, elle ouvre la voie à un avenir où les contrôles routiniers de la sécurité des tunnels peuvent être plus rapides, plus fréquents et moins dépendants du jugement subjectif humain.
Citation: Ren, Z., Zhu, H., Zhao, L. et al. MLS-based recognition and parameter extraction of roadway roof bolts/cables from 3D point clouds. Sci Rep 16, 6538 (2026). https://doi.org/10.1038/s41598-026-37689-3
Mots-clés: scannage laser mobile, nuages de points 3D, inspection des boulons d’ancrage, sécurité dans les mines souterraines, surveillance des soutènements de tunnel