Clear Sky Science · fr
Planification de trajectoire dynamique tenant compte de la qualité pour bras robotisés 6 DoF utilisant BiRRT et optimisation métaheuristique basée sur des trajectoires B-spline
Des robots qui se déplacent en douceur et en sécurité
Les robots industriels partagent désormais des postes de travail encombrés avec des personnes, des outils et des convoyeurs. Dans ces espaces restreints, un bras robotique ne peut pas se contenter d’aller du point A au point B ; il doit le faire sans collisions, en consommant peu d’énergie et sans se secouer — ni détériorer l’équipement voisin. Cet article décrit une méthode pratique pour planifier de tels mouvements prudents pour un bras industriel courant à six articulations, transformant des trajectoires brutes trouvées par ordinateur en déplacements lisses et économes en énergie, exécutables en toute sécurité sur du matériel d’usine réel.
Pourquoi planifier un simple déplacement est étonnamment difficile
Lorsque le bras d’un robot bouge, plusieurs contraintes doivent être équilibrées simultanément. La trajectoire doit être courte pour réaliser la tâche rapidement, la consommation d’énergie doit rester modérée pour limiter la chaleur et l’usure, et le mouvement doit être suffisamment doux pour éviter à l’armature de hoqueter ou de vibrer. Les approches classiques tracent des courbes mathématiques lisses (comme des splines) à travers quelques points de passage choisis manuellement, ce qui fonctionne bien en espace dégagé mais peut devenir inefficace, voire dangereux, dans des cellules encombrées. Les méthodes d’échantillonnage plus récentes, comme les arbres de recherche aléatoire à exploration rapide (RRT), excellent à se frayer un chemin dans des champs d’obstacles complexes mais tendent à produire des trajectoires avec des coudes brusques, pénalisant les moteurs et les transmissions. Les auteurs soutiennent qu’aucune de ces familles de méthodes n’est suffisante seule ; ils les combinent donc dans un cadre en deux étapes.
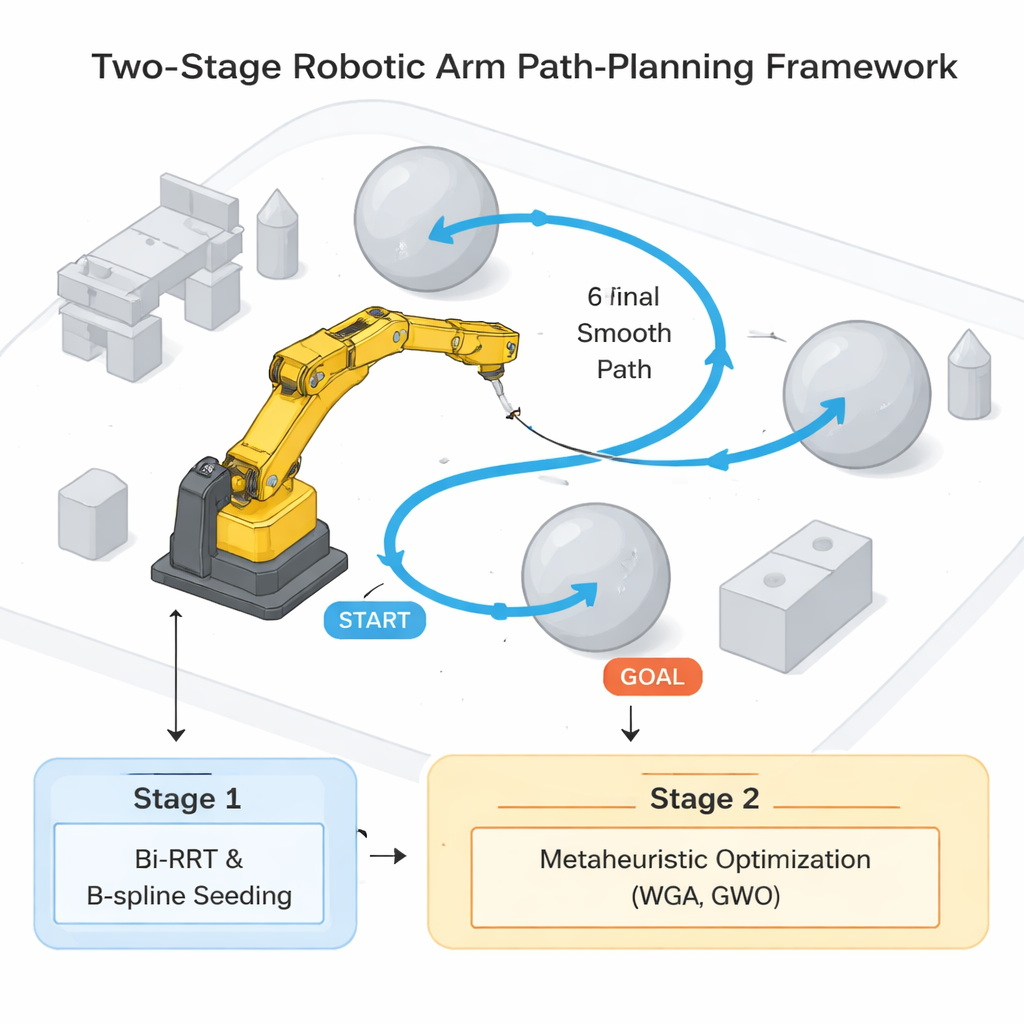
Une feuille de route en deux étapes pour le mouvement robotique
Dans la première étape, l’équipe construit une « route de référence » sécurisée dans l’espace des articulations du robot plutôt que de se limiter à la position de l’effecteur. Ils partent d’une courbe B-spline lisse reliant les positions de départ et d’arrivée tout en contournant des obstacles sphériques avec une marge de sécurité. Cette courbe sert ensuite de guide à un planificateur Bi-RRT bidirectionnel qui fait pousser deux arbres aléatoires — depuis le départ et depuis l’arrivée — jusqu’à ce qu’ils se rejoignent en une trajectoire exempte de collisions. À chaque étape, chaque mouvement candidat de l’ensemble du bras est vérifié par rapport à des formes d’obstacles simplifiées. Une fois une trajectoire trouvée, les coudes redondants sont éliminés par « raccourcissement », puis le résultat est ré-exprimé comme une spline paramétrée en temps que le robot pourrait, en principe, suivre.
Apprendre au robot à bouger plus doucement
La deuxième étape prend cette trajectoire faisable mais imparfaite et l’ajuste pour en améliorer la qualité. Ici, les auteurs utilisent deux méthodes d’optimisation inspirées de la nature : un algorithme hybride Whale–Genetic (WGA) et l’optimiseur Grey Wolf (GWO). Les deux agissent sur un ensemble limité de points de contrôle et de paramètres temporels le long de la spline initiale, mais ils ne sont autorisés à déplacer ces points qu’à l’intérieur de couloirs sûrs pré-calculés autour de la trajectoire. Chaque mouvement candidat est évalué par une mesure combinée unique qui mêle trois ingrédients : la distance parcourue par l’effecteur, l’énergie au niveau des articulations (basée sur les caractéristiques de chaque moteur) et la « saccade » des articulations — la rapidité des variations d’accélération dans le temps. En proposant, testant et améliorant répétitivement des trajectoires candidates, ces optimiseurs recherchent des mouvements toujours sans collision mais beaucoup plus lisses et prêts à l’exécution.
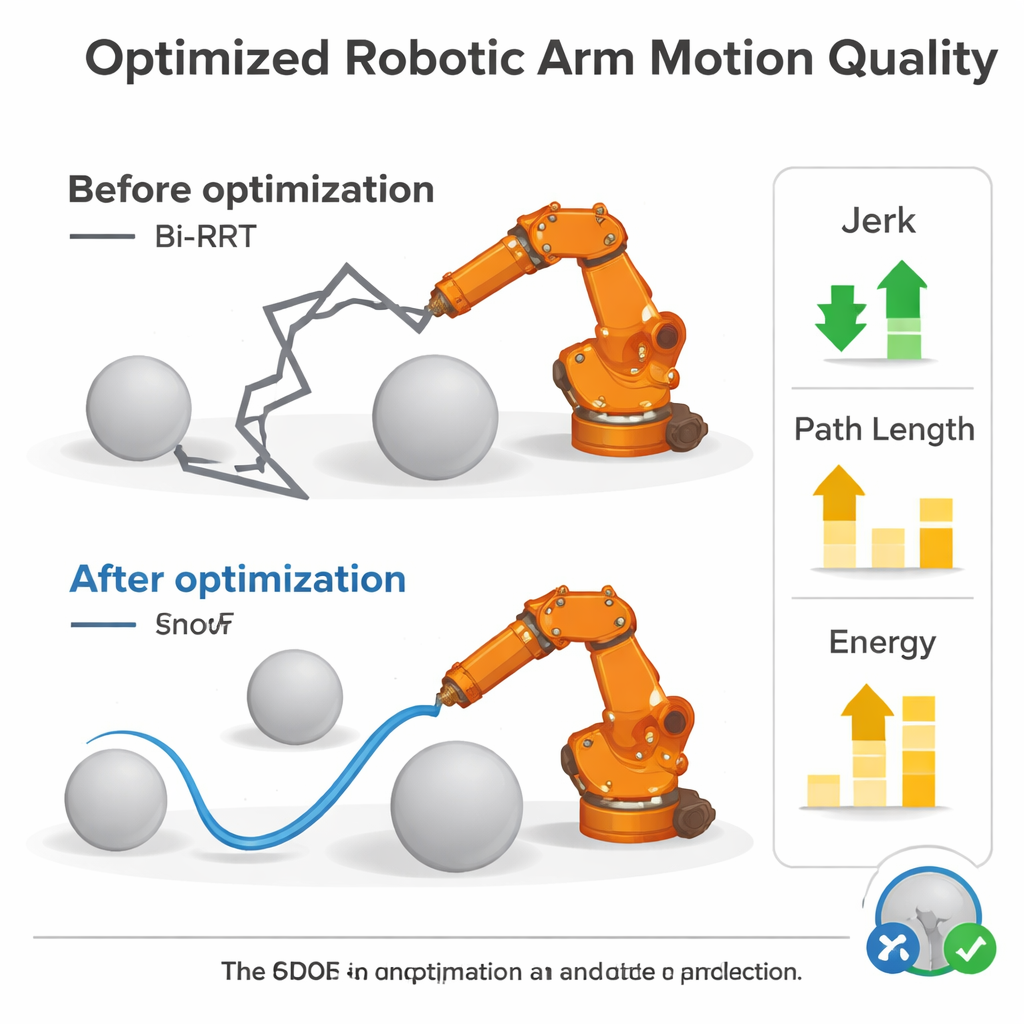
Ce que révèlent les simulations
Les auteurs testent leur chaîne de traitement sur un modèle numérique d’un bras industriel largement utilisé, le KUKA KR 4 R600, évoluant dans une scène à trois obstacles sur un déplacement fixé à deux secondes. Une solution purement basée sur les splines est déjà raisonnablement lisse mais n’exploite pas systématiquement toutes les routes sûres possibles. Un Bi-RRT avec raccourcissement trouve une trajectoire de longueur géométrique comparable et avec une consommation d’énergie même plus faible, mais avec un inconvénient majeur : son indice de jerk — indicateur de la brusquerie des variations d’accélération des articulations — est environ dix fois plus élevé, signalant un mouvement susceptible de provoquer des vibrations et des contraintes sur une machine réelle. Après application du WGA ou du GWO, le jerk est réduit d’environ 94–96 % par rapport à cette trajectoire Bi-RRT brute. Ce lissage spectaculaire s’accompagne uniquement d’augmentations modestes de la distance parcourue (environ 15–17 %) et de l’énergie (≈ un facteur deux), un compromis que les auteurs jugent largement acceptable pour du matériel réel.
De la théorie à l’atelier
Pour un non-spécialiste, l’idée clé est que les auteurs fournissent une recette concrète — et des outils basés sur MATLAB — pour transformer la première idée brute d’un robot sur la façon de se déplacer en un mouvement poli et adapté au matériel. Leur approche garantit d’abord l’existence d’une trajectoire dans un environnement encombré, puis redessine cette trajectoire afin que le bras effectue moins de secousses tout en respectant toutes les limites d’articulation et les dégagements. Le résultat final est une famille de mouvements qu’un robot industriel réel peut exécuter de manière plus sûre et plus fiable, ouvrant la voie à des extensions futures où les robots partagent des espaces de travail avec des humains et adaptent leurs mouvements en temps réel à l’aide de caméras et même d’interfaces par signaux cérébraux.
Citation: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Mots-clés: planification de trajectoire robotique, bras robotique industriel, évitage des collisions, fluidité du mouvement, optimisation métaheuristique