Clear Sky Science · fr
Apprentissage profond pour la détection des déchets de construction utilisant l’attention ConvNeXt V2 EMA et la perte WIoU v3
Pourquoi un tri plus intelligent des gravats est important
Chaque nouvelle construction, rénovation ou démolition génère des montagnes de débris — béton cassé, briques, carreaux, bois, mousse, et plus encore. Une grande partie de ces matériaux pourrait être recyclée, mais finit souvent enfouie en décharge parce que leur tri manuel est lent, coûteux et sujet aux erreurs. Cette étude examine comment une forme avancée d’intelligence artificielle peut reconnaître et trier automatiquement différents types de déchets de construction à partir d’images, aidant les villes à réduire la pollution, économiser des matières premières et progresser vers une véritable circularité des ressources du bâtiment.
Gravats, ressources et un problème mondial croissant
Les déchets de construction et de démolition constituent aujourd’hui l’un des flux de déchets à la croissance la plus rapide dans le monde, avec environ un milliard de tonnes générées chaque année. Ces tas de débris consomment de l’espace, risquent de polluer les sols et les eaux, et gaspillent des matériaux dont la production a nécessité énergie et émissions. Aujourd’hui, leur traitement repose encore largement sur l’enfouissement et le stockage. Des systèmes de vision automatisés capables de distinguer rapidement le béton de la brique, le carreau du bois ou la mousse du plâtre pourraient améliorer sensiblement les taux de recyclage. Pourtant, les chantiers réels sont chaotiques : les objets se chevauchent, sont couverts de poussière et partagent des couleurs et textures similaires, rendant la reconnaissance automatique fiable particulièrement difficile.
Un « œil » numérique neuf pour les déchets sur la bande transporteuse
Les auteurs présentent un système de détection d’objets adapté appelé YOLO‑CEW, construit à partir de la populaire famille de modèles YOLO pour la vision en temps réel. Ils l’entraînent sur un jeu de données spécialisé de 1 774 images prises dans une usine de recyclage à Chypre, contenant plus de 11 000 éléments étiquetés de déchets de construction et de démolition répartis en six catégories courantes : béton, brique, carreau, plaque de plâtre, bois et mousse. Les images sont divisées en ensembles d’entraînement, de validation et de test pour éviter le surapprentissage, et le modèle est exécuté plusieurs fois avec des initialisations aléatoires différentes pour garantir la robustesse des résultats. L’objectif est de maintenir le système assez rapide pour une utilisation sur des bandes transporteuses en mouvement tout en améliorant nettement la précision avec laquelle il repère et étiquette chaque fragment de déchet.
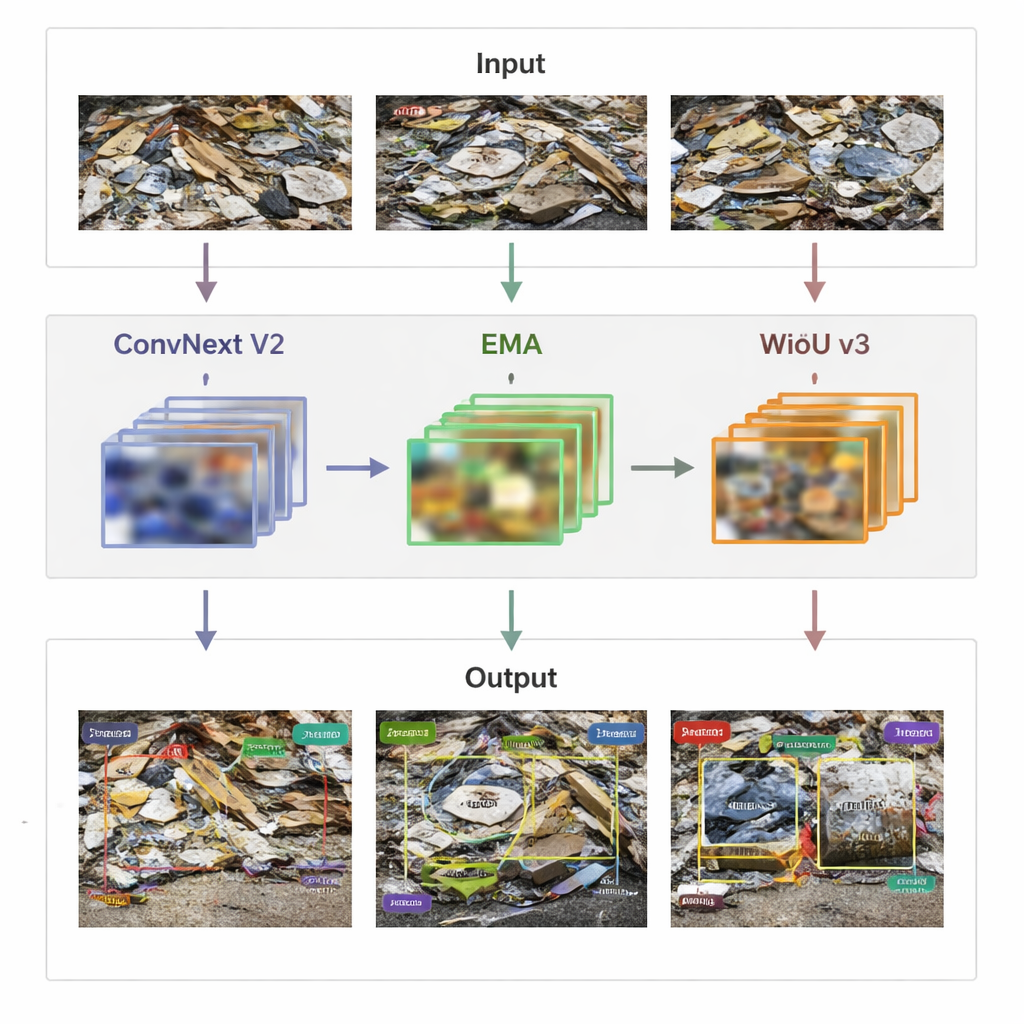
Comment l’IA améliorée regarde de plus près et apprend de ses erreurs
YOLO‑CEW améliore le modèle de référence YOLOv8 de trois manières clés. Premièrement, il remplace certaines étapes par un nouveau backbone d’extraction de caractéristiques, ConvNeXt V2, plus performant pour capter des différences visuelles subtiles — comme les motifs fins qui distinguent les carreaux du béton — sans trop ralentir le système. Deuxièmement, il ajoute un module d’Attention Multi‑échelle Efficace (EMA) qui apprend au réseau à se concentrer sur les régions les plus informatives à différentes tailles, renforçant sa capacité à détecter à la fois de grandes dalles et de petits fragments partiellement cachés tout en ignorant le bruit de fond distrayant. Troisièmement, il introduit une fonction de perte d’entraînement mise à jour, WIoU v3, qui réduit le poids des prédictions de boîtes englobantes très mauvaises et concentre l’apprentissage sur des exemples plus prometteurs, aidant le modèle à resserrer ses boîtes autour des objets réels au lieu d’être trompé par des échantillons bruyants.
Évaluer le modèle dans des conditions réalistes
Sur le jeu de données de déchets de construction, YOLO‑CEW atteint une précision de 96,84 %, un rappel de 95,95 % et un score global de détection (mAP@50) de 98,13 %, tous supérieurs à la baseline YOLOv8. Concrètement, cela signifie qu’il rate moins d’objets et génère moins de fausses alertes. Le modèle est particulièrement performant pour distinguer des classes difficiles comme les carreaux et la mousse, même si une certaine confusion entre brique et béton persiste lorsque la poussière brouille les contours. Fait important, le système fonctionne encore à environ 128 images par seconde — bien au‑delà de ce qui est nécessaire pour une surveillance en temps réel — ce qui le rend adapté aux lignes de recyclage actives. Des tests statistiques par bootstrap confirment que ces gains ne sont pas dus au hasard. Des comparaisons avec plusieurs autres variantes de YOLO montrent que YOLO‑CEW domine régulièrement en précision tout en conservant un bon équilibre entre vitesse et performances.
Au‑delà d’une usine : adaptation à d’autres flux de déchets
Pour vérifier la généralisabilité de leur approche, les chercheurs testent également YOLO‑CEW sur un jeu de données public distinct de détection de déchets domestiques couvrant des matériaux courants tels que le plastique, le verre et le carton. Même sans être spécialement conçu pour ce nouveau contexte, le modèle surpasse encore le YOLOv8 standard en précision, rappel et qualité de détection globale. Cela suggère que les améliorations architecturales — meilleure extraction de caractéristiques, attention plus intelligente et gestion plus fine des mauvais exemples d’entraînement — pourraient être réutilisées dans d’autres tâches de recyclage et de surveillance environnementale, du tri des déchets ménagers à la détection de détritus par drones.
Ce que cela signifie pour des villes plus propres et plus intelligentes
Pour les non‑spécialistes, la conclusion est que YOLO‑CEW fonctionne comme un système de vision bien plus précis et plus perçant pour les gravats. Il peut observer un flux de débris en mouvement, isoler chaque objet et indiquer avec une grande fiabilité et rapidité de quel matériau il est composé. Cela facilite grandement la conception de lignes automatisées où des machines trient et redirigent les matériaux vers la réutilisation plutôt que l’enfouissement. Bien que des défis subsistent — tels que la gestion d’un encombrement extrême, de la poussière et de matériaux rares — l’étude montre que des modèles d’apprentissage profond finement ajustés peuvent transformer les tas de « déchets » d’aujourd’hui en flux de ressources de demain, soutenant des pratiques de construction plus vertes et des villes plus intelligentes.
Citation: Han, D., Ma, M., Li, X. et al. Deep learning for construction waste detection using ConvNeXt V2 EMA attention and WIoU v3 loss. Sci Rep 16, 6441 (2026). https://doi.org/10.1038/s41598-026-37473-3
Mots-clés: déchets de construction, recyclage IA, détection d’objets, villes intelligentes, apprentissage profond