Clear Sky Science · fr
Mise à l’échelle sûre des formations et planification de mouvement pour des équipes hétérogènes UAV–UGV dans des environnements encombrés
Robots qui coopèrent dans les airs et au sol
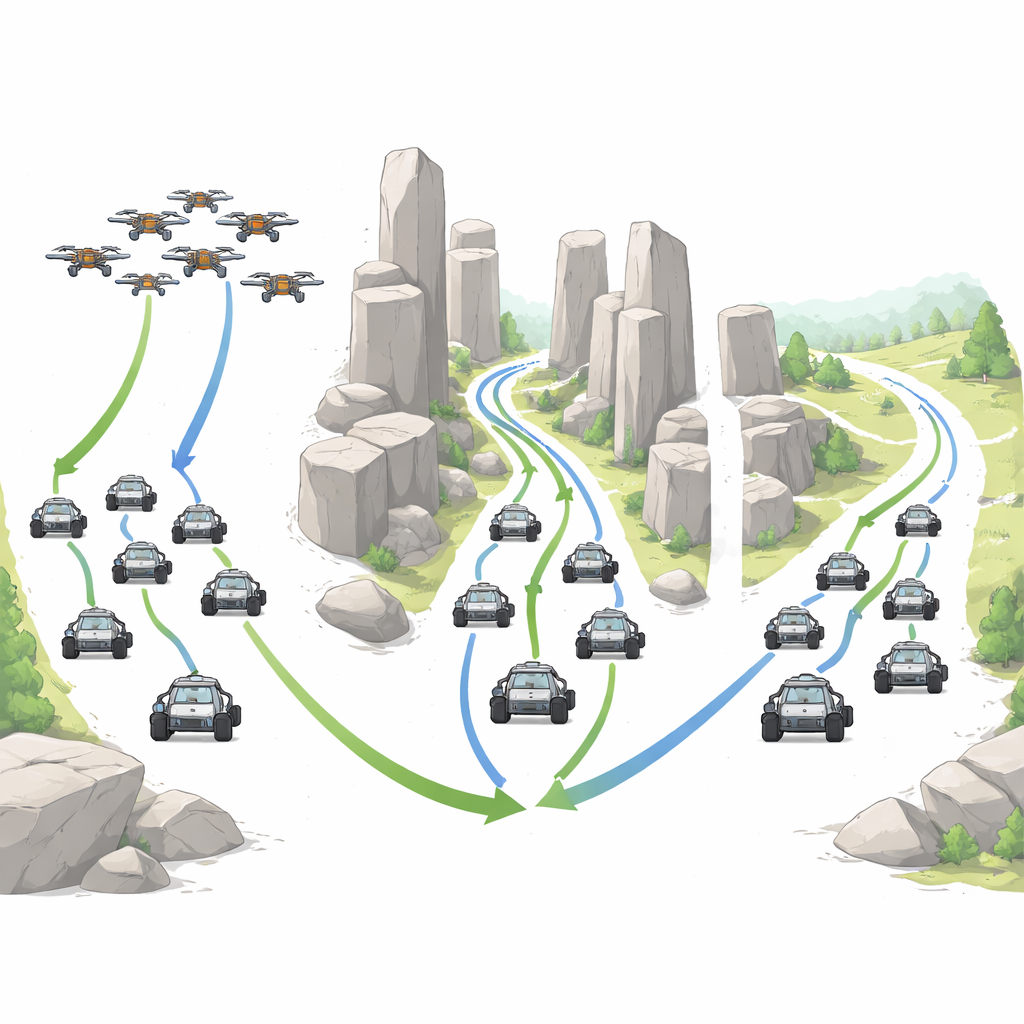
Imaginez un essaim de petits drones volant au-dessus d’une zone sinistrée pendant que des véhicules tout-terrain se faufilent entre les décombres en dessous, tous se déplaçant comme une équipe coordonnée. Cet article explore comment maintenir de tels groupes robotiques mixtes assemblés dans des espaces encombrés et étroits sans collisions ni replanifications frénétiques. Les auteurs proposent une nouvelle méthode permettant aux robots aériens et terrestres de partager une formation stable, de se faufiler dans des passages étroits et d’atteindre leur objectif rapidement et en toute sécurité.
Pourquoi il est difficile de coordonner des équipes mixtes
Les drones volants et les véhicules terrestres à roues se comportent très différemment. Les drones se déplacent dans l’espace tridimensionnel et sont facilement déviés par le vent. Les véhicules terrestres doivent respecter des limites de braquage et composer avec un terrain accidenté. Pourtant, de nombreuses missions réelles — des opérations de recherche et sauvetage à l’inspection d’infrastructures — gagneraient à voir ces robots voyager ensemble comme un seul groupe tridimensionnel. Les méthodes existantes traitent souvent le maintien de la formation et l’évitement d’obstacles comme des problèmes séparés. Quand l’environnement devient encombré, les formations ont tendance à se rompre puis à se réassembler, ce qui fait perdre du temps et augmente le risque de collisions.
Une nouvelle façon de maintenir le groupe uni
Pour y remédier, les auteurs conçoivent un cadre qu’ils appellent RG–ASAPF, qui couple étroitement la forme du groupe et sa façon de se déplacer. Au cœur de l’approche se trouve une description mathématique de la formation en tant que structure « rigide » : les distances souhaitées entre robots sont choisies de sorte que la forme globale soit déterminée de manière unique, comme les barres d’un échafaudage stable en 3D. Chaque robot utilise ensuite une règle commune pour ajuster son mouvement afin que ces distances soient retrouvées et maintenues, même lorsque la formation se déplace et tourne. Cette règle est conçue pour fonctionner à la fois pour les robots volants et roulants, et elle s’adapte en ligne aux incertitudes telles que les frottements non modélisés ou de petites poussées externes.
Permettre à la formation de se « respirer » dans des espaces étroits
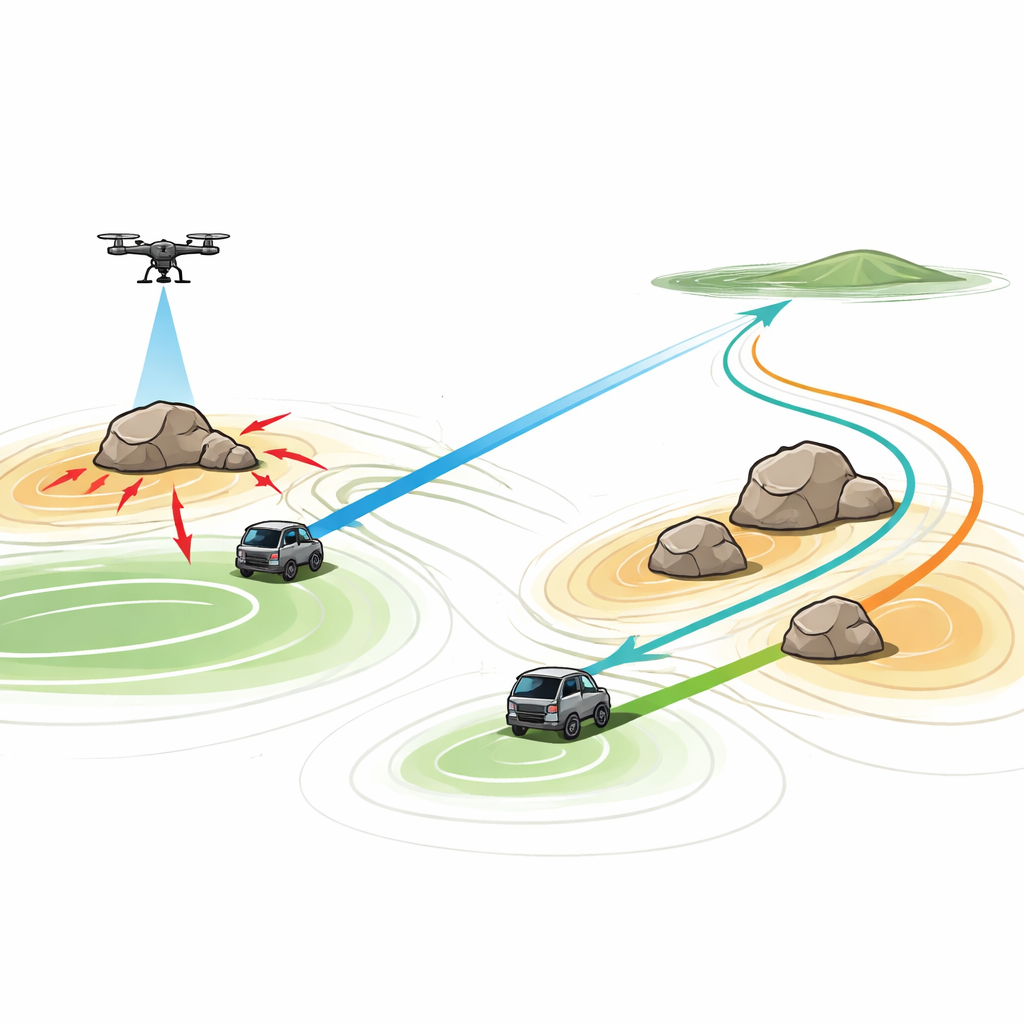
Les environnements réels sont rarement des champs ouverts ; ils sont remplis de bâtiments, d’arbres, de véhicules et d’objets mobiles. Une formation sûre en espace ouvert peut être trop large pour passer dans une ruelle étroite ou un cluster d’obstacles dense. La méthode proposée permet à la formation de se mettre à l’échelle en douceur — en rétrécissant ou en s’étendant — tout en préservant sa structure de base. L’équipe introduit un véhicule terrestre leader qui planifie une trajectoire en utilisant un champ de potentiel artificiel, où l’objectif agit comme un attracteur et les obstacles repoussent la formation. Contrairement aux champs de potentiel traditionnels, qui peuvent se coincer dans des impasses ou provoquer des mouvements saccadés, leur version « adaptative et sûre » module en continu l’intensité de la répulsion des obstacles afin que la formation garde une distance de sécurité sans devenir excessivement prudente ni piégée.
Des trajectoires plus intelligentes à travers l’encombrement et le mouvement
Le champ de potentiel est affiné de sorte que le « paysage » global d’attraction et de répulsion ait toujours son point le plus bas au niveau de l’objectif. Cela aide à empêcher la formation d’être bloquée dans des positions inconfortables entre des obstacles. L’intensité de l’effet répulsif est ajustée à la volée à l’aide d’une règle d’apprentissage simple empruntée aux premiers entraînements de réseaux neuronaux. Quand les robots se rapprochent trop des obstacles, la répulsion augmente automatiquement ; lorsqu’il y a suffisamment d’espace libre, elle se relâche. Si l’environnement devient tellement étroit qu’une formation réduite ne peut toujours pas passer en toute sécurité, la méthode active une solution de secours : l’équipe fait une brève pause, élargit une corridor de sécurité notionnel, et replanifie une route plus sûre autour de la zone problématique avant de reprendre son avancée.
Tests dans des mondes virtuels
Pour évaluer l’efficacité de la méthode, les auteurs réalisent de nombreuses simulations informatiques avec des équipes mixtes de drones et de véhicules terrestres. Ils testent des espaces ouverts avec peu d’obstacles, des labyrinthes denses avec de nombreuses barrières, des scènes contenant des obstacles mobiles, et des formations devant se transformer en formes 3D plus complexes comme un prisme hexagonal. Dans tous ces cas, la formation se maintient en trois dimensions, évite en toute sécurité les obstacles statiques et mobiles, et ajuste sa taille lorsque nécessaire. Les robots suivent des trajectoires fluides et efficaces plutôt que de zigzaguer autour des barrières. Comparée à plusieurs méthodes de planification populaires — y compris les champs de potentiel classiques et améliorés, l’optimisation par essaim de particules, et le contrôle prédictif basé sur des modèles linéaires et non linéaires — la nouvelle approche trouve des trajectoires généralement plus courtes, plus lisses et moins énergivores, tout en les calculant plus rapidement que des techniques lourdes basées sur l’optimisation.
Ce que cela signifie pour les missions réelles
Pour un non-spécialiste, le message clé est que l’article montre comment faire évoluer des équipes mixtes de robots volants et roulants comme un seul corps flexible à travers des espaces 3D encombrés. Plutôt que de rompre la formation dès l’apparition d’obstacles, le groupe peut se plier, se contracter et se réorienter tout en restant cohérent et sûr. Cela pourrait se traduire par un soutien robotique plus rapide et plus fiable lors de catastrophes, d’inspections industrielles et de patrouilles de sécurité. Bien que le travail actuel soit démontré en simulation et s’appuie sur un véhicule leader désigné, les auteurs esquissent des étapes futures vers des équipes plus tolérantes aux pannes et des expérimentations sur le terrain, rapprochant la vision d’essaims robotisés aériens–terrestres fortement coordonnés de la pratique.
Citation: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Mots-clés: formation multi-robots, coopération UAV UGV, évitement d’obstacles, planification de mouvement, robotique en essaim