Clear Sky Science · fr
Un exosquelette de téléopération du membre supérieur avec paramétrage continu de la longueur du bras et intégration adaptative de l’impédance déclenchée par la force
Travail pratique plus sûr à distance
De nombreux métiers les plus dangereux sur Terre — et dans l’espace — exigent encore du jugement et de la dextérité humains. Pensez à réparer une installation nucléaire endommagée, manipuler des explosifs ou stabiliser un engin spatial. Cette étude présente un nouveau type d’exosquelette motorisé pour le membre supérieur qui permet à une personne de contrôler un bras robotique distant comme s’il s’agissait du sien, tout en restant à l’écart du danger. L’appareil vise à faire en sorte que le robot bouge et « ressente » comme une extension naturelle du corps du porteur, tout en s’adaptant à différentes longueurs de bras et aux forces changeantes de l’environnement.
Pourquoi les bras à distance comptent
Les robots travaillent déjà sous l’eau, dans les zones sinistrées et à l’intérieur des réacteurs, mais la plupart sont soit préprogrammés soit guidés par de simples joysticks. Cela limite leurs capacités quand les conditions changent soudainement. Les systèmes de téléopération — où une personne contrôle en temps réel un robot éloigné — offrent une solution intermédiaire, associant la prise de décision humaine à la force et à la portée du robot. Les systèmes antérieurs pouvaient déplacer des outils, mais manquaient souvent de retour de force précis et ne s’ajustaient pas facilement aux corps des différents utilisateurs. Le résultat était des mouvements maladroits, une faible « sensation » et une fatigue accrue pour l’opérateur comme pour la machine.
Un bras robotisé portable qui s’adapte vraiment
L’équipe a construit un exosquelette portable du membre supérieur avec sept articulations motorisées alignées sur l’épaule, le coude et le poignet. Des matériaux légers comme la fibre de carbone et l’aluminium maintiennent l’appareil réactif plutôt que lourd et lent. Une innovation majeure est que la longueur du bras supérieur et de l’avant-bras de l’exosquelette peut être ajustée de manière continue, et non par quelques positions fixes. Des rails coulissants équipés de capteurs électriques intégrés mesurent en continu la longueur réelle du bras du porteur et alimentent un modèle corporel numérique. Ainsi, l’appareil reconstruit automatiquement sa géométrie interne pour chaque personne, améliorant le confort et rendant les mouvements du robot plus fidèles aux intentions humaines. 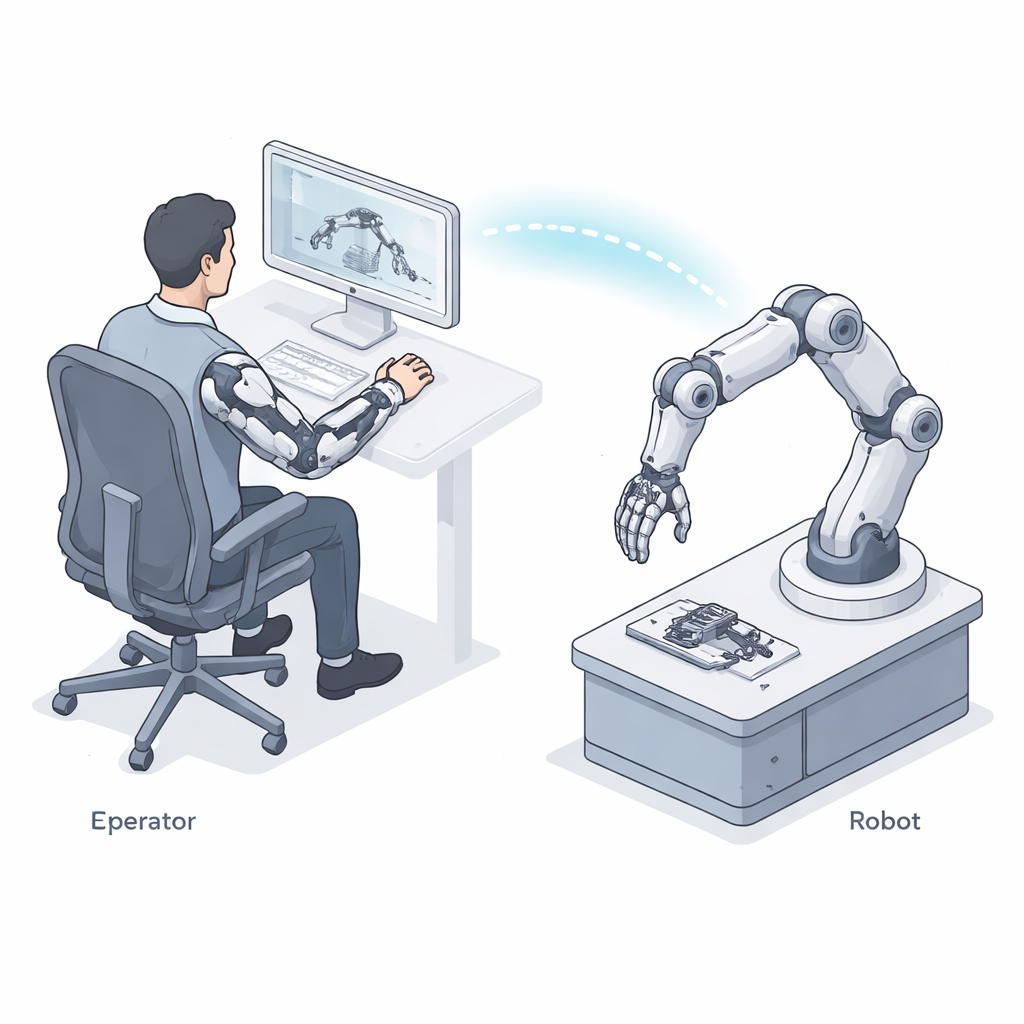
Se mouvoir avec le corps, et non contre lui
Les épaules humaines ne tournent pas seulement comme des charnières ; l’omoplate glisse aussi sur la cage thoracique. Beaucoup d’exosquelettes ignorent ce point et finissent par lutter contre le mouvement naturel, provoquant de l’inconfort. Cette conception intègre un module passif avec plusieurs degrés de liberté supplémentaires qui suit discrètement les déplacements subtils de l’épaule et du haut du corps, réduisant la pression sur la peau et les articulations. En parallèle, les articulations motorisées sont calibrées pour que leur couple — la force de torsion — reste en dessous des limites sûres pour les tissus humains. Des arrêts d’urgence et des détecteurs de blocage complètent les fonctions de sécurité, permettant au système de réagir rapidement en cas de problème.
Une façon plus intelligente de percevoir le contact
Au-delà de la mécanique, les auteurs se concentrent sur ce que le porteur ressent. Lorsque le robot distant touche ou pousse quelque chose — un mur, la poignée d’un outil ou un autre objet — ces forces sont renvoyées via l’exosquelette de sorte que l’utilisateur perçoive la résistance. Le système de commande combine deux exigences normalement contradictoires : suivre précisément les mouvements de l’opérateur et adopter un comportement souple et conforme lorsque les forces de contact augmentent. À faibles forces, le système se comporte de manière rigide et précise, suivant étroitement la trajectoire du bras du porteur. Quand les forces dépassent un seuil de sécurité, la commande s’adoucit automatiquement, laissant un peu de jeu afin que les impacts soient amortis plutôt que brutaux. Les auteurs utilisent des outils mathématiques basés sur l’énergie pour montrer que ce comportement mixte reste stable et n’entraîne pas d’oscillations incontrôlées. 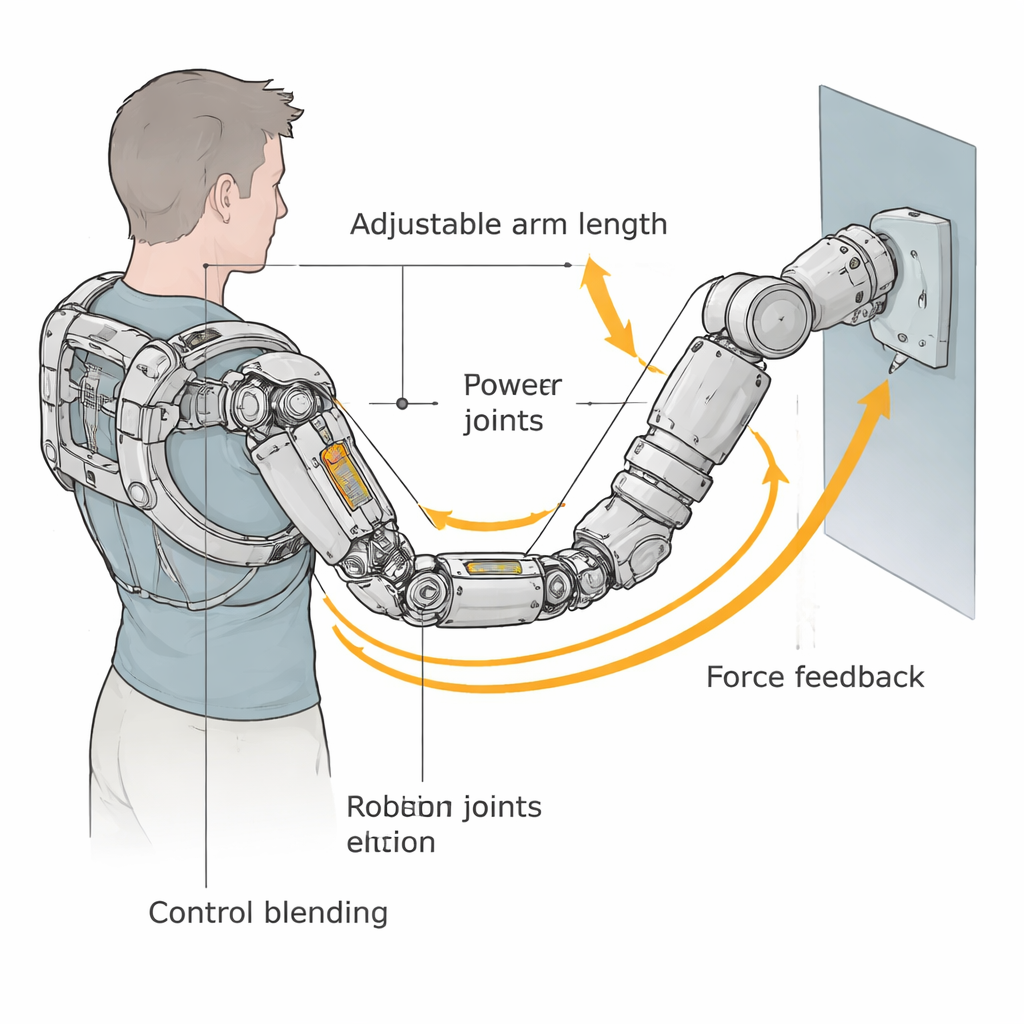
Mise à l’épreuve du système
Pour évaluer l’exosquelette, les chercheurs l’ont connecté à un bras robotique industriel largement utilisé. Lorsqu’une personne portant l’exosquelette traçait un huit dans l’air, le robot distant reproduisait le mouvement de près, malgré de petits délais de communication. Des tests supplémentaires ont examiné la précision de la mesure de la longueur du bras : les relevés de tension des capteurs coulissants correspondaient aux mesures physiques avec des erreurs de l’ordre de quelques millimètres, même après de multiples enfilages et retrait. Dans des simulations contrôlées où le robot appuyait contre un mur virtuel rigide, le schéma de commande complet a réduit les forces de contact maximales d’environ 70 % par rapport à une configuration basique, tout en conservant en grande partie la précision de suivi en mouvement libre.
Ce que cela signifie pour le travail et les soins réels
Concrètement, cette recherche nous rapproche de robots à distance qui donnent l’impression d’être aussi naturels et sûrs à piloter que le mouvement de son propre bras. En combinant un châssis ajustable proche du corps, un suivi précis du mouvement humain et une rétroaction de force intelligente qui s’adapte en temps réel, le système promet une téléopération plus précise et moins fatigante dans les environnements dangereux. La même technologie pourrait aussi servir des patients en rééducation après un AVC, permettant aux thérapeutes de guider et d’enregistrer les mouvements du bras pendant que les patients reçoivent une assistance et un retour d’information réalistes. À mesure que les futures versions intégreront des signaux musculaires et le regard, et apprendront de l’expérience, ces paires exosquelette–robot pourraient devenir des outils polyvalents pour les missions extrêmes comme pour la rééducation courante.
Citation: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Mots-clés: exosquelette de téléopération, contrôle de bras robotique, rétroaction de force, robotique de rééducation, opérations à distance en milieu dangereux