Clear Sky Science · fr
Protocole de réponse d’urgence de bout en bout pour les accidents en tunnel augmenté par apprentissage par renforcement
Pourquoi des sauvetages en tunnel plus intelligents comptent
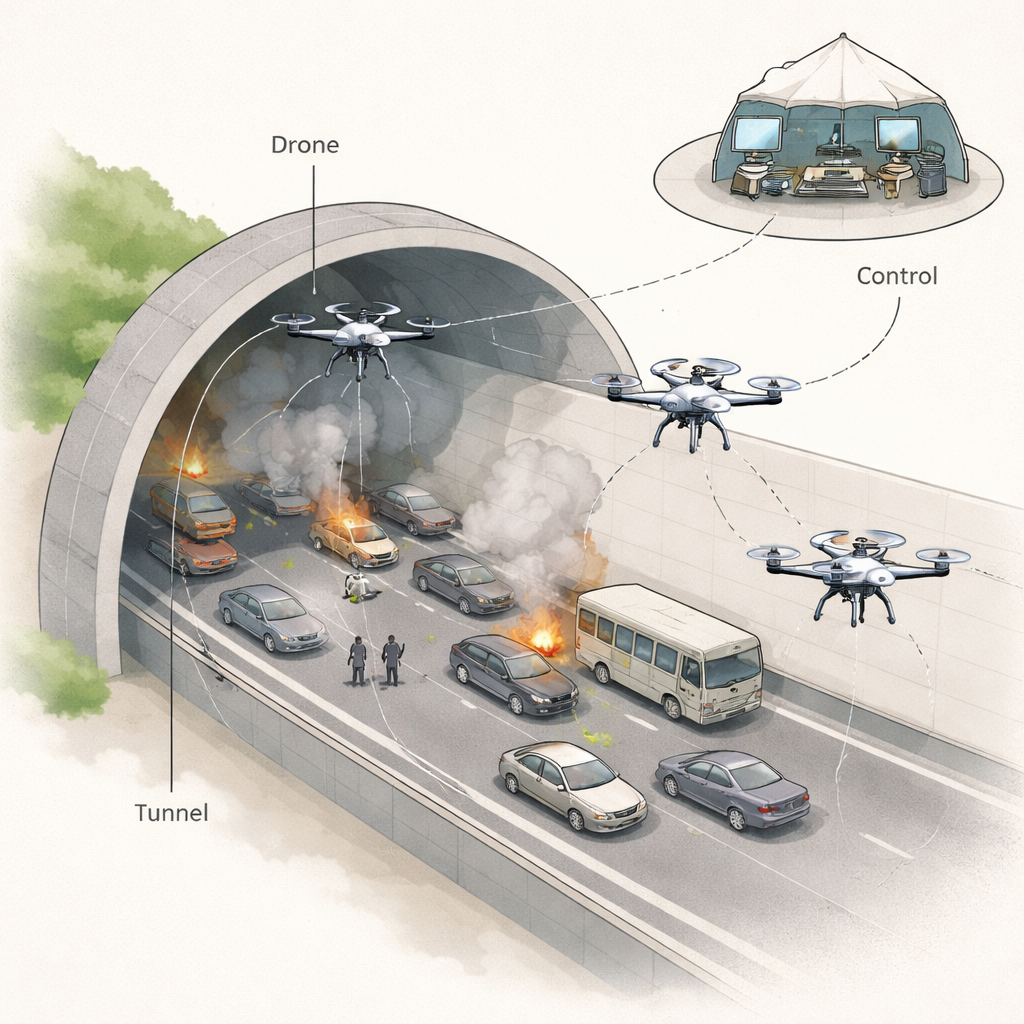
Lorsqu’une catastrophe survient dans un tunnel routier — qu’il s’agisse d’un accident, d’un incendie ou d’un effondrement structurel — des personnes peuvent se retrouver piégées dans un long tube enfumé et labyrinthique avec très peu de sorties. Les secouristes humains doivent s’engouffrer alors que la visibilité chute, que la température augmente et que des débris bloquent le passage. Cette étude examine comment de petits robots volants, ou drones, guidés par une stratégie d’apprentissage sophistiquée, pourraient devenir des assistants rapides et fiables dans ces situations dangereuses, en repérant les victimes et en cartographiant des itinéraires sûrs tout en maintenant les équipes humaines à l’écart des pires dangers.
Points d’étranglement souterrains dangereux
Les villes modernes reposent sur des tunnels pour les autoroutes, les trains et les services publics, mais la même conception fermée qui les rend efficaces les rend aussi particulièrement mortels en cas d’accident. Les incendies propagent rapidement la fumée, des gaz toxiques s’accumulent et des passages étroits peuvent se boucher avec des véhicules accidentés ou du béton effondré. Les équipes de secours traditionnelles entrent souvent avec des informations limitées, tâtonnant sur la direction à suivre alors que leurs radios peinent à fonctionner à travers la roche et le béton. Des catastrophes passées en Chine, au Japon et ailleurs ont montré combien il est difficile d’atteindre les victimes à temps, soulignant le besoin d’outils capables de voir et d’anticiper au‑delà des capacités humaines.
Apprendre aux drones à explorer et à chercher
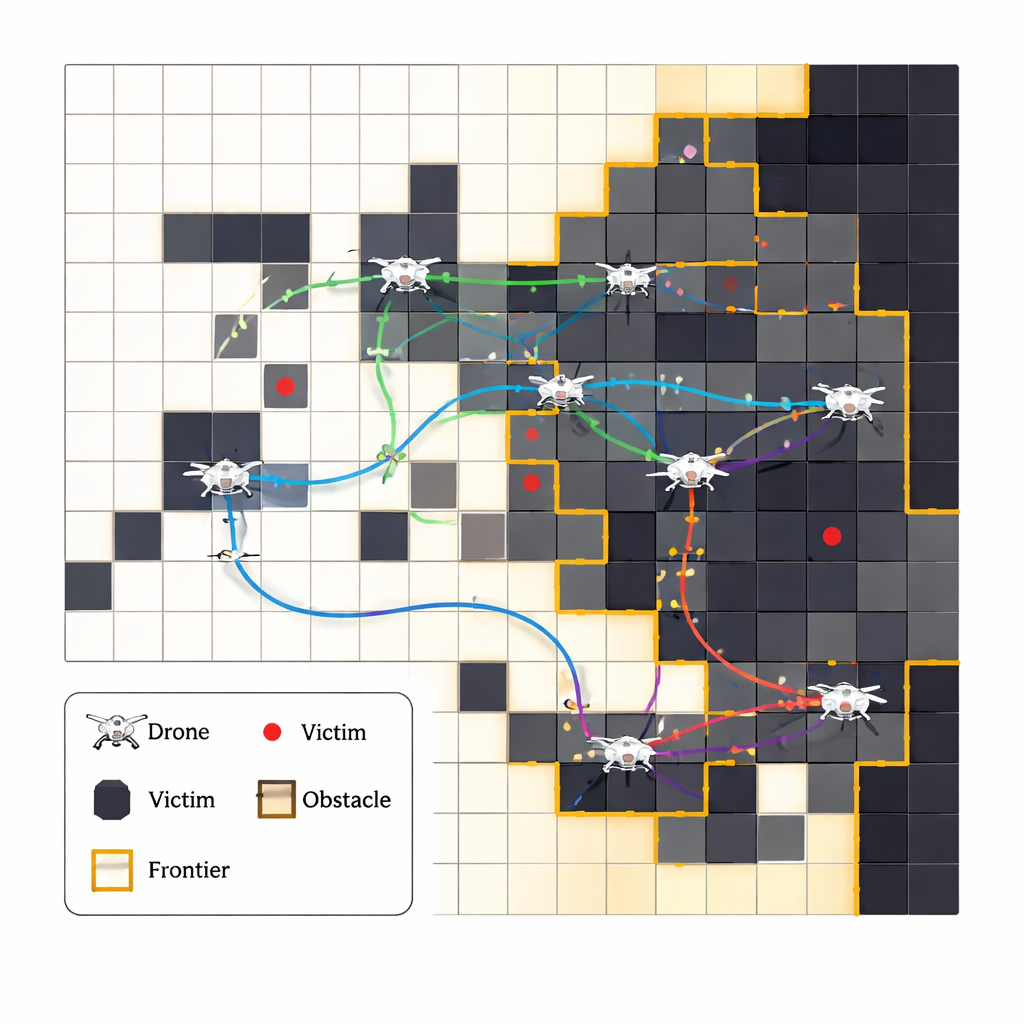
Les auteurs proposent un système où plusieurs drones autonomes coopèrent pour explorer un tunnel endommagé, construire une carte en temps réel et localiser des personnes piégées. Plutôt que de suivre un itinéraire fixe et préprogrammé, chaque drone apprend de l’expérience à l’aide d’une méthode appelée apprentissage par renforcement : il essaie des actions, observe les résultats et découvre progressivement quelles décisions tendent à conduire à des sauvetages plus rapides et à moins d’erreurs. Le tunnel est représenté comme une grille de cellules, et les drones se concentrent sur les « frontières » où l’espace connu rencontre l’espace inconnu, repoussant progressivement cette limite. À chaque étape, ils choisissent parmi un petit ensemble de mouvements de grille, mettant à jour leurs tableaux internes des mouvements qui ont le mieux fonctionné dans des situations similaires.
Faire coopérer de nombreux robots sans bavardage
Faire rechercher plusieurs drones dans le même tunnel soulève un nouveau défi : comment éviter qu’ils ne se percutent ou ne scannent à plusieurs reprises la même zone, surtout lorsque la communication peut être peu fiable ? Plutôt que de leur imposer un chef central ou un bavardage radio constant, les chercheurs conçoivent un système de notation simple qui encourage discrètement un bon comportement de groupe. Un drone gagne une grosse récompense lorsqu’il découvre une nouvelle victime, mais il est pénalisé s’il perd du temps à revisiter le même endroit, s’il entre en collision avec un autre drone ou s’il « échoue » en épuisant sa batterie. Avec le temps, cela pousse chaque drone à privilégier les régions inexplorées et à éviter ses coéquipiers, de sorte qu’une forme de coopération émerge naturellement des conséquences partagées, même si chaque appareil apprend techniquement de manière autonome.
Emprunter des astuces aux loups pour éviter de rester coincé
L’apprentissage purement par essai‑erreur peut parfois se bloquer dans des habitudes sûres mais sous‑optimales — par exemple toujours choisir un couloir familier plutôt que d’essayer un raccourci risqué. Pour maintenir la curiosité des drones, l’équipe emprunte des idées à un modèle mathématique décrivant la chasse des loups gris en meute. Ce composant « Grey Wolf Optimization » incite les drones à imiter occasionnellement les schémas de recherche les plus performants observés jusqu’alors, tout en laissant de la place à l’exploration. En pratique, il influence les nouvelles actions essayées, aidant le processus d’apprentissage à sortir des impasses et à s’adapter lorsque le tunnel change — par exemple si une partie du passage devient soudainement obstruée par le feu ou des débris.
Tester l’approche dans des catastrophes virtuelles
Parce qu’il n’est pas sûr de tester des stratégies non éprouvées dans de vrais tunnels d’urgence, les chercheurs construisent des simulations informatiques détaillées qui reproduisent des couloirs étroits, des impasses, des obstacles et des victimes dispersées. Ils comparent leur système basé sur l’apprentissage à plusieurs autres méthodes, y compris la déambulation purement aléatoire et l’optimisation isolée sans apprentissage. Tant dans les essais à drone unique qu’à multi‑drone, leur approche retrouve les victimes plus rapidement, explore une plus grande partie du tunnel avec moins d’étapes perdues et évite les collisions de manière plus fiable. Fait important, elle utilise des calculs légers basés sur des tableaux plutôt que des réseaux profonds gourmands en énergie, ce qui signifie qu’elle pourrait raisonnablement fonctionner sur de petits ordinateurs embarqués lors d’une urgence réelle.
Ce que cela pourrait signifier pour les sauvetages futurs
L’étude montre que des essaims de drones relativement simples, guidés par des règles d’apprentissage soigneusement conçues et quelques idées empruntées à la nature, pourraient devenir des partenaires précieux pour les pompiers et les équipes de secours dans les catastrophes en tunnel. En cartographiant rapidement des environnements enfumés et changeants et en se concentrant sur les lieux probables de victimes sans contrôle humain constant, de tels systèmes pourraient gagner des minutes précieuses sur les temps d’intervention tout en réduisant les risques encourus par les premiers intervenants. Bien que les travaux restent pour l’instant basés sur des simulations et des capteurs idéaux, ils posent une base pratique pour de futurs systèmes réels qui devront fonctionner sous de fortes contraintes de temps, d’énergie et de calcul dans certains des contextes de sauvetage les plus difficiles sur Terre.
Citation: ur Rehman, H.M.R., Gul, M.J., Younas, R. et al. End-to-end emergency response protocol for tunnel accidents augmentation with reinforcement learning. Sci Rep 16, 6226 (2026). https://doi.org/10.1038/s41598-026-37191-w
Mots-clés: réponse d'urgence en tunnel, drones de recherche et sauvetage, apprentissage par renforcement multi‑agent, gestion robotique des catastrophes, exploration autonome