Clear Sky Science · fr
Estimation en temps réel de l’état de charge de la batterie et stratégie de charge autonome pour un robot de recharge de stockage d’énergie dynamique avec filtre de Kalman étendu
Pourquoi des batteries de robot plus intelligentes comptent
Des coursiers d’entrepôt aux robots d’inspection, l’utilité des robots mobiles dépend largement de leurs batteries. Si un robot se trompe sur l’énergie restante, il peut s’immobiliser loin d’une station de charge, interrompant le travail et risquant d’endommager sa batterie. Cet article présente une nouvelle méthode permettant aux robots de « connaître » en temps réel leur niveau de batterie réel et de décider quand et comment se recharger, afin qu’ils puissent travailler plus longtemps, plus sûr et avec moins de supervision humaine.

Robots, tâches intenses et batteries stressées
À la différence des voitures électriques roulantes sur autoroute, de nombreux robots mobiles subissent des démarrages brusques, des arrêts et des variations fréquentes de charge. Ces secousses provoquent des fluctuations rapides du courant et de la tension de la batterie, qui perturbent les méthodes traditionnelles d’estimation de la charge restante. Les méthodes simples qui lisent la tension ou qui font l’intégration du courant dans le temps partent souvent du principe de conditions calmes et constantes et ne suivent pas l’évolution liée à l’usure ou au réchauffement de la batterie. En conséquence, leurs estimations dérivent, les erreurs s’accumulent et le robot peut soit se recharger trop souvent, soit solliciter excessivement la batterie, raccourcissant sa durée de vie.
Un modèle plus réaliste de ce qui se passe dans la batterie
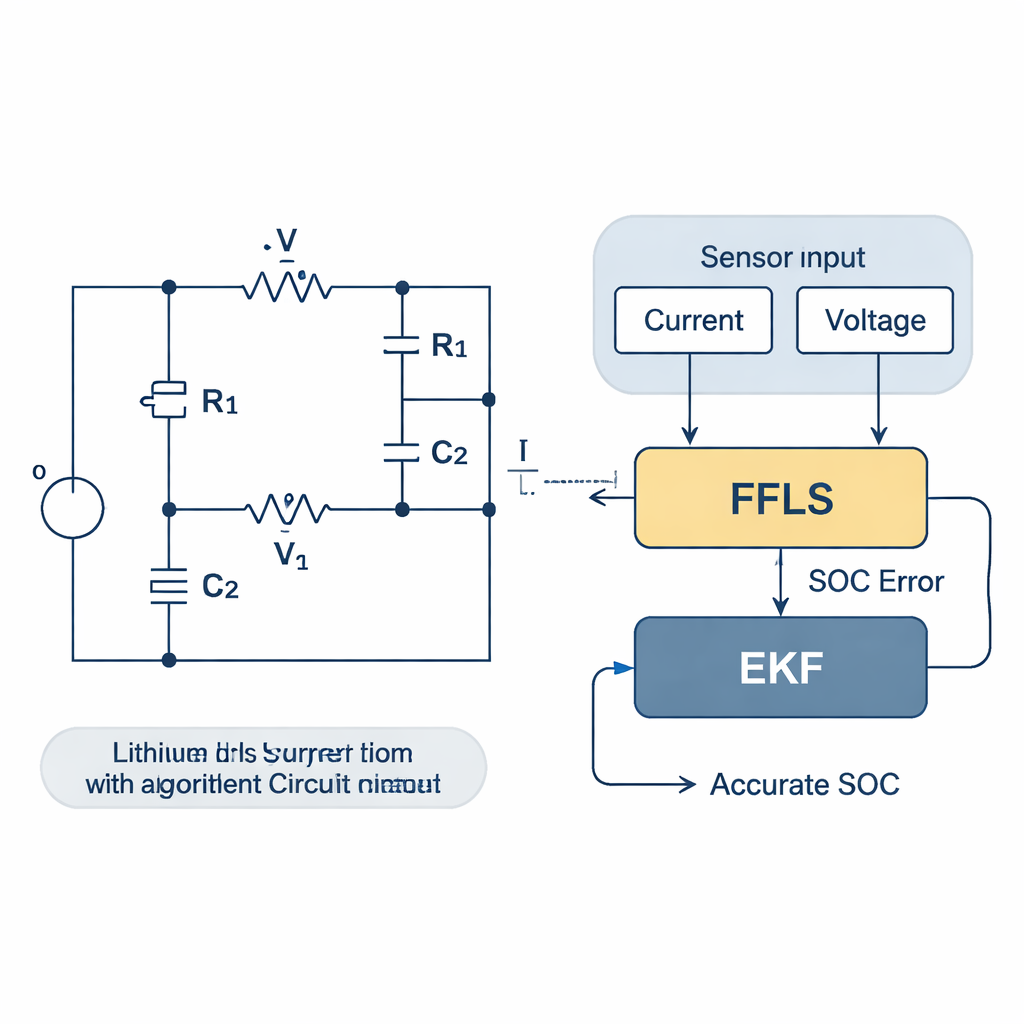
Les auteurs abordent ce problème en donnant au robot une vision plus réaliste de son pack de batteries lithium fer phosphate. Plutôt que de traiter la batterie comme une boîte noire avec un simple chiffre de tension, ils la représentent par un réseau électrique comportant une résistance interne et deux branches de « polarisation » qui reproduisent le déplacement et l’accumulation des ions à l’intérieur de la cellule. Ce modèle RC d’ordre deux capture les réponses rapides et lentes aux variations de charge. Le robot mesure en continu le courant et la tension et ajuste ces signaux sur le modèle à l’aide d’une méthode des moindres carrés avec un « facteur d’oubli » — un procédé mathématique qui accorde plus d’importance aux données récentes et atténue l’historique obsolète lorsque les conditions changent.
Laisser l’algorithme apprendre et s’adapter en continu
Sur ce modèle, l’équipe applique un filtre de Kalman étendu, un outil largement utilisé pour suivre des états cachés dans des données bruitées. Ici, l’état caché est l’état de charge réel de la batterie. Pendant le fonctionnement du robot, le filtre prédit comment la charge devrait évoluer en s’appuyant sur le modèle et le courant mesuré, puis corrige cette prédiction à l’aide de la tension mesurée. Le module des moindres carrés avec facteur d’oubli met à jour en ligne les paramètres clés du modèle, de sorte que le filtre ne dépend jamais d’une description de batterie obsolète calibrée en usine. Astucieusement, les chercheurs exploitent aussi une relation entre la résistance interne et une quantité appelée capacité de polarisation : quand la température monte, la résistance diminue et la capacité augmente. En observant les deux paramètres simultanément, le système peut déduire les effets de la température sans capteur de température physique et ajuster le modèle en conséquence.
Apprendre aux robots quand et comment se recharger
Des estimations de charge précises ne suffisent pas à elles seules; l’autre volet est la manière dont le robot les utilise. Les auteurs conçoivent une stratégie de charge autonome qui évite à la fois le « plein d’appoint » constant et les décharges profondes. Ils définissent des limites de charge supérieure et inférieure : si la batterie descend sous un seuil, le robot privilégie le retour à une station ; si elle est déjà proche de la limite supérieure, il repousse la charge et continue de travailler. Dans la plage sûre, le robot se recharge pendant les moments d’inactivité. Le système surveille également chaque cellule du pack et équilibre leur charge afin qu’aucune cellule ne soit surchargée pendant que d’autres restent en retard, une étape clé pour prévenir le vieillissement prématuré. Pour rendre l’accostage efficace, le robot combine la navigation à l’échelle d’une pièce avec une guidance infrarouge courte portée, raccourcissant les distances et le temps d’accostage.
Une alimentation de robot plus durable et plus fiable
Dans des tests utilisant des jeux de données publiques sur les batteries, des simulations et des robots réels, la nouvelle méthode a estimé l’état de charge avec environ 98 % de précision, surpassant nettement plusieurs alternatives avancées basées sur des filtres particulaires, des réseaux neuronaux et des Transformers. Les batteries gérées avec cette approche ont mieux conservé leur charge au fil de semaines d’utilisation simulée et ont résisté à 15 à 40 % de cycles charge–décharge en plus que avec des méthodes concurrentes. La résistance interne a augmenté plus lentement, indicateur de cellules en meilleure santé, et les robots ont passé moins de temps au dock tout en maintenant une meilleure santé de la batterie. Pour le grand public, la conclusion est que cette technique permet aux robots de mieux « prendre soin » de leurs propres batteries : ils peuvent évaluer leur énergie plus précisément, choisir des moments de recharge plus judicieux et prolonger discrètement la durée de vie des packs de batteries coûteux sans capteurs supplémentaires ni forte puissance de calcul.
Citation: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Mots-clés: robots mobiles, état de charge de la batterie, charge autonome, filtre de Kalman étendu, batteries lithium fer phosphate