Clear Sky Science · fr
Recherche sur la détection multi‑échelle des fissures des routes de mines à ciel ouvert
Pourquoi les micro‑fissures des routes minières comptent
Les mines à ciel ouvert dépendent de routes longues et sinueuses pour déplacer chaque jour des milliers de tonnes de roche. Lorsque ces routes se fissurent, les camions peuvent être endommagés, la circulation ralentit et, dans les pires cas, des accidents peuvent survenir. Pourtant, ces fissures commencent souvent comme des cheveux de verre difficiles à voir à l’œil nu, surtout dans des environnements miniers poussiéreux et ombragés. Cette étude présente une méthode d’intelligence artificielle (IA) capable de repérer et de cartographier les fissures des routes de mines à ciel ouvert de manière plus précise et plus efficace que les techniques existantes, ouvrant la voie à des opérations plus sûres et plus rentables.
Le défi de repérer les fissures dans un paysage hostile
L’inspection des routes minières se fait encore souvent par des agents qui marchent ou roulent lentement le long des voies d’exploitation et examinent visuellement la surface. Cette approche est lente, subjective et quasi impossible à déployer à l’échelle sur les nombreux kilomètres de routes d’une grande mine. Les techniques classiques de traitement d’image, comme le seuillage simple ou la détection de contours, peinent aussi parce que les routes à ciel ouvert sont visuellement chaotiques : pierres détachées, traces de pneus, flaques d’eau et forts contrastes d’éclairage créent des motifs qui peuvent être pris pour des fissures. Même les modèles d’apprentissage profond modernes ont des difficultés dans ce contexte, car les fissures elles‑mêmes sont fines, discontinues et parfois partiellement recouvertes de débris, et les architectures standard tendent à perdre ces détails fins.
Un modèle d’IA qui fusionne des détails à plusieurs niveaux
Pour surmonter ces obstacles, les auteurs partent de l’U‑Net, un réseau populaire pour la segmentation d’images, et repensent la façon dont il combine l’information. Leur module de fusion de caractéristiques adaptatif agit comme un mixeur intelligent qui rassemble des caractéristiques à plusieurs échelles de l’image — des textures fines au niveau du pixel jusqu’aux formes larges — et les ajuste à une même taille. Il utilise ensuite deux étapes d’attention : l’une qui apprend quelles canaux contiennent les indices de fissure les plus utiles, et une autre qui injecte des informations sur la scène globale. En re‑pondérant dynamiquement ces apports, le module amplifie les signaux de fissures faibles tout en atténuant les distractions telles que les ombres et le gravier, conduisant à des bords de fissure plus précis dans la carte de sortie. 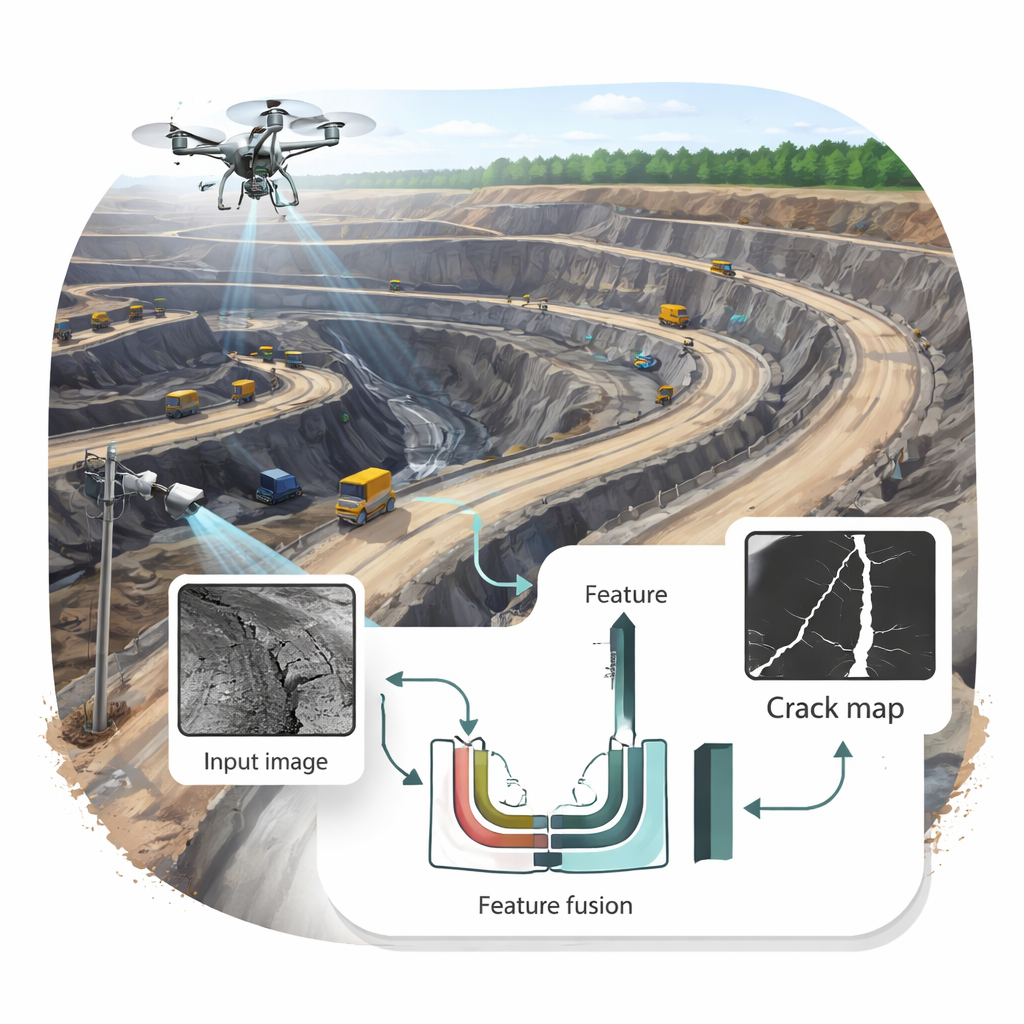
Apprendre au réseau où regarder
Au‑delà de la fusion des caractéristiques, les chercheurs introduisent un module d’attention canal‑spatial qui apprend au réseau à la fois quoi regarder et où regarder. Inspiré des techniques d’auto‑attention largement utilisées dans les modèles de langage, il analyse d’abord comment les différentes canaux de caractéristiques se relient entre eux, se demandant en quelque sorte quelles combinaisons indiquent « ceci est une fissure ». Il ajoute ensuite une étape d’attention spatiale qui met en évidence les régions exactes de l’image où les fissures sont les plus probables. Combinées, ces étapes aident le modèle à distinguer les textures de fissure d’un arrière‑plan encombré et à maintenir la continuité des fractures fines et sinueuses, même lorsque des parties sont masquées ou de faible contraste.
Rendre l’IA suffisamment rapide pour le terrain
La haute précision ne suffit pas pour une mine opérationnelle, où les ordinateurs peuvent être installés dans des camions, des bureaux de terrain ou des drones avec une puissance de calcul limitée. Pour répondre à ce besoin, l’équipe applique une stratégie d’élagage appelée Layer‑Adaptive Magnitude Pruning. En termes simples, elle mesure l’importance de chaque groupe de poids internes pour les décisions du modèle puis supprime les moins utiles, couche par couche. Jusqu’à un niveau d’élagage modéré, le réseau devient plus léger et plus rapide — en éliminant environ un quart de ses paramètres et près d’un tiers de ses opérations — sans nuire à la précision de détection et, dans ce cas, en l’améliorant légèrement. Le modèle final peut traiter une tuile d’image en environ un tiers de seconde, rendant le contrôle des fissures presque en temps réel réalisable.
Performances du système dans des mines réelles
Les chercheurs ont testé leur méthode sur 2 847 images haute résolution collectées dans une mine de charbon à ciel ouvert de Mongolie intérieure, couvrant une grande variété de revêtements routiers, de conditions d’éclairage et de formes de fissures. Comparé à l’U‑Net d’origine et à plusieurs autres modèles de segmentation bien connus, le réseau amélioré a obtenu un recouvrement plus important avec les masques de fissures tracés par des humains, moins de fausses alertes et une meilleure continuité pour les fissures petites ou partiellement cachées. Parallèlement, il a tourné plus rapidement et requis moins de mémoire que de nombreux concurrents. Ces gains suggèrent que l’approche est non seulement solide académiquement, mais aussi pratique pour un déploiement sur des dispositifs en périphérie tels que serveurs de site minier, caméras ou plates‑formes de drones. 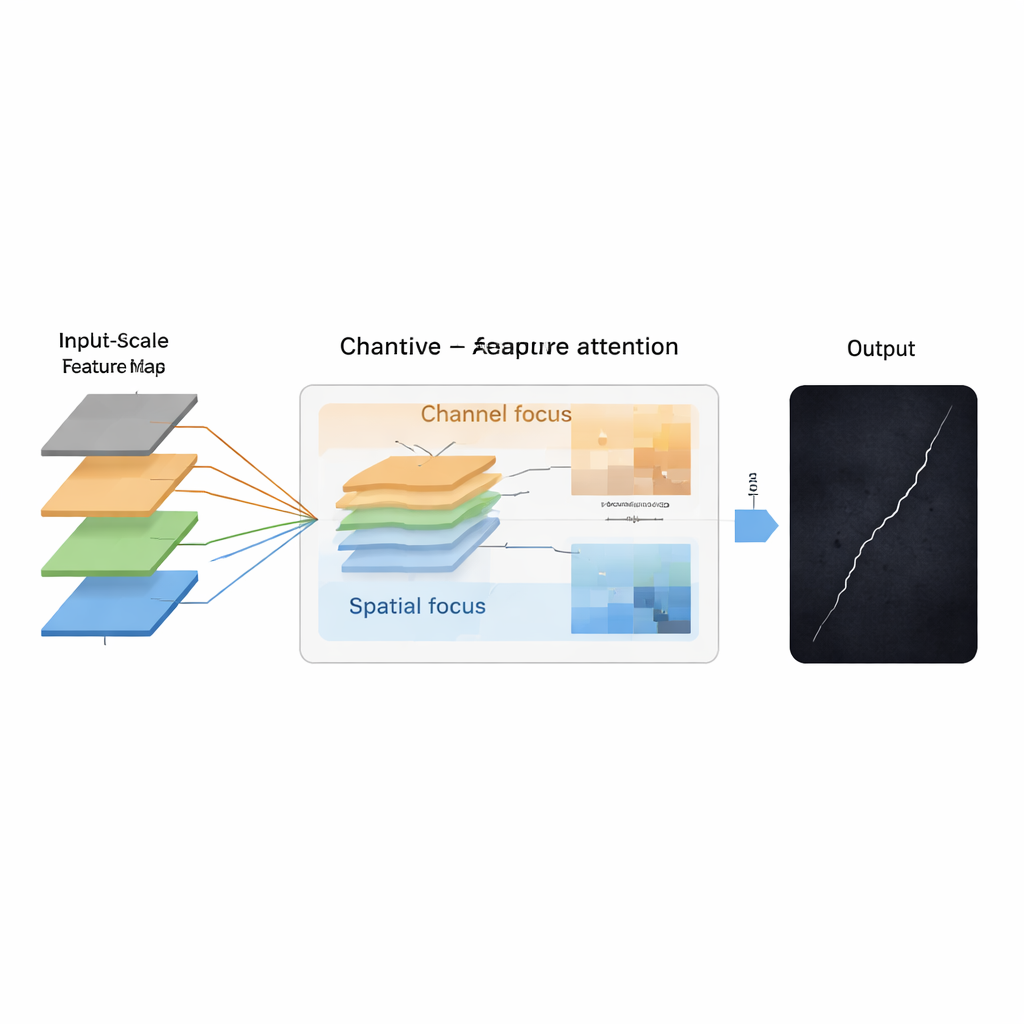
Ce que cela implique pour la sécurité des opérations minières
Pour un non‑spécialiste, la conclusion est que ce travail transforme des photos brutes de routes minières poussiéreuses en cartes de fissures précises et lisibles par machine à l’aide d’un modèle d’IA compact. Cela rend possible l’inspection fréquente de longues portions de route — potentiellement par drones ou caméras embarquées sur véhicules — et la localisation précise des zones nécessitant un entretien avant que de petits défauts ne deviennent des dangers sérieux. Si des défis subsistent dans des conditions extrêmement bruyantes ou inhabituelles, cette approche basée sur la fusion de caractéristiques et l’attention marque une étape importante vers une maintenance routière plus intelligente et préventive dans les grandes mines à ciel ouvert.
Citation: Wang, L., Zhao, M., Yu, Z. et al. Research on multi-scale feature detection of open-pit mine road cracks. Sci Rep 16, 6060 (2026). https://doi.org/10.1038/s41598-026-37153-2
Mots-clés: routes de mines à ciel ouvert, détection de fissures, vision par ordinateur, apprentissage profond, sécurité des infrastructures