Clear Sky Science · fr
YOLO-DC pour la détection de véhicules utilisant des réseaux de convolution déformables et une attention par coordonnées inter-canaux
Pourquoi repérer les voitures depuis les caméras est vraiment important
Les villes modernes s’appuient sur des caméras qui surveillent les routes fréquentées, aidant à gérer les embouteillages et préparant le terrain pour les véhicules autonomes. Mais repérer de façon fiable chaque véhicule dans ces flux vidéo est étonnamment difficile, surtout lorsque les voitures sont petites au loin, partiellement cachées dans la circulation, ou floutées par la pluie, le brouillard ou l’obscurité. Cet article présente YOLO‑DC, un nouveau système de vision par ordinateur conçu pour détecter rapidement et précisément voitures, bus et autres véhicules, même dans des conditions réelles difficiles et sur des appareils à capacité de calcul limitée.
Le problème de circulation à l’origine de la recherche
Les villes en expansion sont confrontées à des routes encombrées, à davantage d’accidents et à une augmentation des émissions. Les systèmes de transport intelligents offrent des solutions en surveillant le trafic en temps réel et en guidant conducteurs humains et autonomes. L’élément central est la détection de véhicules dans la vidéo, rapide et fiable. Les algorithmes « en deux étapes » plus anciens scannent les images en plusieurs passes et peuvent être très précis, mais sont souvent trop lents pour un usage en temps réel sur des caméras routières ou dans les véhicules. Les systèmes « en une étape » plus récents, comme la famille YOLO (« You Only Look Once »), sacrifiant un peu de complexité pour gagner beaucoup en vitesse, sont devenus populaires en pratique. Toutefois, ils peinent encore avec les véhicules petits ou se chevauchant et avec les intempéries qui masquent les détails. YOLO‑DC s’appuie sur le modèle YOLOv8 le plus récent et repense ses couches internes pour mieux faire face à ces défis.
Comment YOLO‑DC voit plus grâce à une attention plus fine
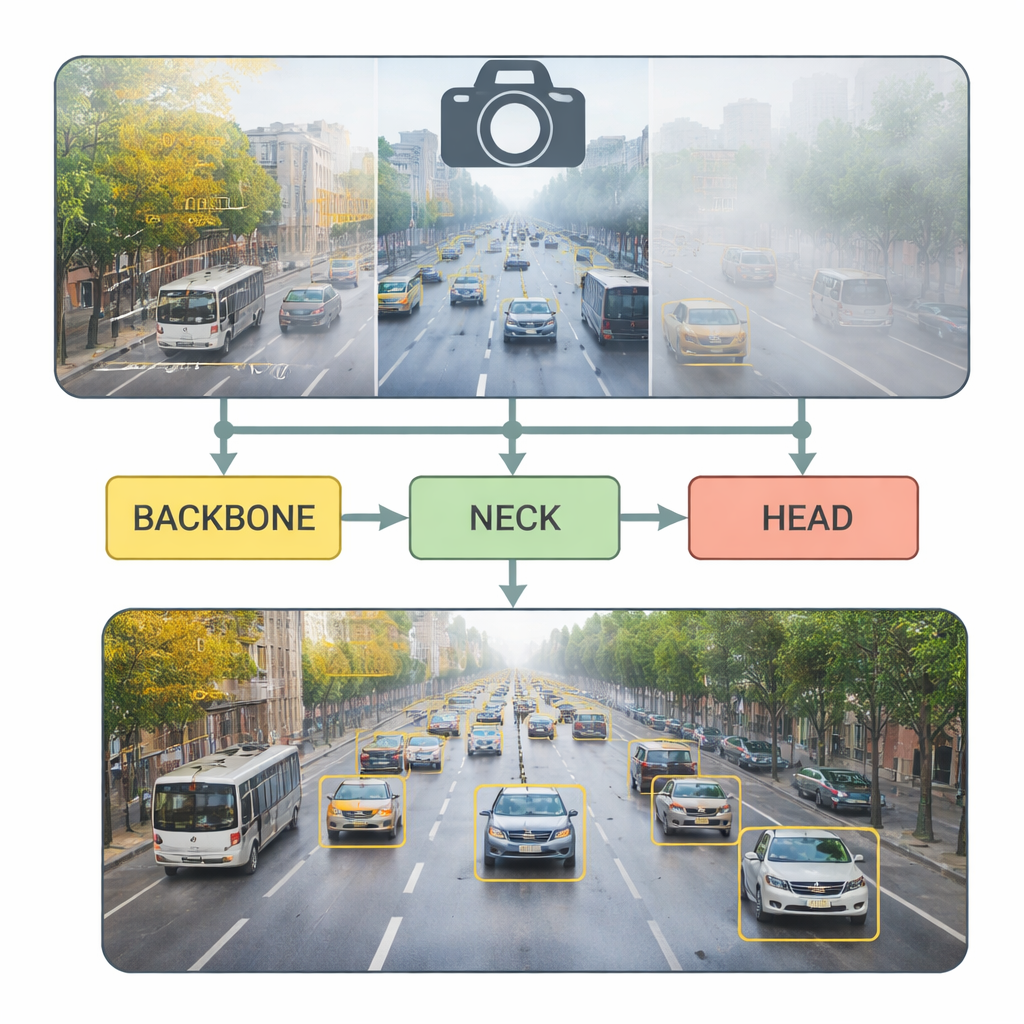
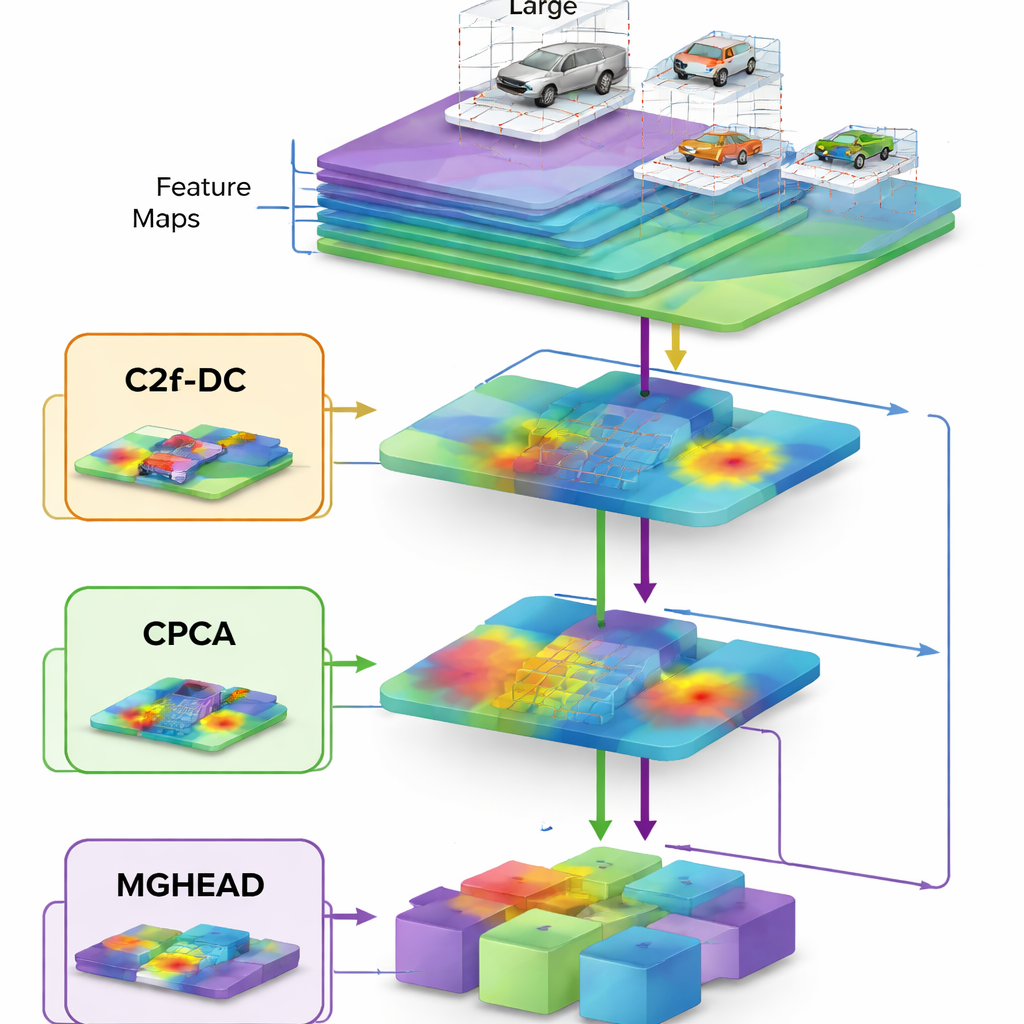
Au cœur de YOLO‑DC se trouve un réseau « backbone » remanié, la partie qui transforme d’abord les images brutes en caractéristiques abstraites. Les auteurs introduisent un mécanisme appelé attention par coordonnées inter‑canaux, qui apprend au réseau non seulement où regarder dans l’image mais aussi quels types de motifs visuels méritent plus d’importance. Combinée aux convolutions déformables — des filtres qui peuvent courber leur motif d’échantillonnage pour suivre des véhicules inclinés ou de forme inhabituelle — ce backbone peut mieux s’adapter aux voitures vues sous différents angles, échelles et positions. Plutôt que de traiter chaque portion de route de façon égale, le système apprend à accentuer les contours et textures révélateurs qui distinguent les véhicules réels des bâtiments, arbres ou marquages au sol.
Capturer les petits véhicules lointains sans ralentir
La partie médiane du modèle, appelée neck, fusionne les informations des vues grossières, larges, avec les détails fins et rapprochés. YOLO‑DC améliore cette étape de deux manières. D’une part, un module d’attention à priorisation de canal aide le réseau à supprimer le bruit et à mettre en valeur des indices subtils provenant de petits véhicules éloignés dans la scène. D’autre part, un bloc repensé, inspiré par l’architecture légère FasterNet, réduit le nombre d’opérations en appliquant des convolutions complètes seulement à une portion des données puis en les mélangeant efficacement. Cette refonte prudente diminue à la fois le nombre de paramètres et le trafic mémoire, permettant au modèle de s’exécuter plus rapidement tout en améliorant réellement la précision — une combinaison rare mais très souhaitable pour les appareils en périphérie comme les caméras de circulation et les ordinateurs embarqués.
Voir les véhicules à toutes les échelles et par mauvais temps
L’étape finale, ou head, décide où se trouvent les objets et ce qu’ils sont. YOLO‑DC introduit ici des convolutions groupées multi‑échelles, divisant les cartes de caractéristiques en plusieurs groupes de canaux qui utilisent chacun des tailles de filtres différentes avant d’être recombinés. Cela donne au détecteur une meilleure compréhension de l’échelle, afin qu’il puisse reconnaître simultanément des bus énormes remplissant le cadre, des camions de taille moyenne et de minuscules voitures à peine visibles au loin. Dans des tests étendus sur le jeu de données UA‑DETRAC, qui contient des scènes routières sous conditions nuageuses, ensoleillées, pluvieuses et nocturnes, YOLO‑DC a égalé ou dépassé la précision des détecteurs de premier plan tout en n’utilisant qu’une fraction de leur puissance de calcul et en traitant des centaines d’images par seconde sur du matériel moderne. Sur le jeu de données DAWN, conçu spécifiquement pour le brouillard, la pluie, la neige et les tempêtes de sable, le nouveau modèle a montré des gains particulièrement importants dans les fortes pluies et le brouillard dense, où les systèmes traditionnels échouent souvent.
Ce que signifient les résultats pour les routes de tous les jours
Pour les non‑spécialistes, le message principal est que YOLO‑DC voit mieux le trafic réel tel qu’il est : encombré, brouillon et souvent masqué par le mauvais temps ou un éclairage dégradé. En combinant des filtres flexibles qui suivent la forme des véhicules avec des mécanismes d’attention qui se concentrent sur les régions les plus informatives, le système détecte davantage de véhicules, en manque moins, et s’exécute assez vite pour l’analyse vidéo en direct sur du matériel modeste. Cela en fait un composant prometteur pour une gestion du trafic plus intelligente, une surveillance des accidents plus fiable et une conduite autonome plus sûre — tout en maintenant des coûts de traitement suffisamment bas pour un déploiement large dans les rues des villes et les véhicules du futur.
Citation: Liu, Z., Zhu, M., Gao, B. et al. YOLO-DC for vehicle detection using deformable convolutional networks and cross-channel coordinate attention. Sci Rep 16, 6284 (2026). https://doi.org/10.1038/s41598-026-37094-w
Mots-clés: détection de véhicules, transport intelligent, YOLO, conditions météorologiques défavorables, vision en temps réel