Clear Sky Science · fr
Chaîne dynamique pour l'ordonnancement des systèmes multi-AGV avec profilage de mouvement tenant compte de la charge
Pourquoi les robots d'entrepôt ont besoin d'un meilleur timing
Le commerce en ligne a rempli les entrepôts de marchandises qu'il faut déplacer rapidement, en toute sécurité et 24 heures sur 24. De nombreuses installations reposent désormais sur des flottes de robots de sol — véhicules à guidage automatique, ou AGV — pour transporter des rayonnages et des palettes. Mais si ces robots sont planifiés en faisant des hypothèses trop simplifiées sur leur mouvement, ils peuvent perdre du temps, secouer des colis fragiles ou même risquer des collisions. Cet article présente une nouvelle façon de planifier et de coordonner plusieurs AGV simultanément en tenant compte de leur comportement physique réel, promettant un trafic plus fluide et un transport de marchandises plus sûr dans les entrepôts très actifs.
Des robots qui déplacent des marchandises, pas seulement des chiffres
Les AGV modernes parcourent déjà en tous sens entrepôts, aéroports et usines, tirant des chariots ou soulevant des rayonnages et des palettes. La plupart des logiciels actuels qui gèrent ces flottes opèrent à un niveau élevé : ils décident quel robot doit effectuer quelle tâche et, de manière approximative, quel itinéraire il doit suivre. Pour simplifier les calculs, ils supposent généralement que le temps de trajet entre deux points est fixe, en ignorant la façon dont un robot peut réellement accélérer ou ralentir, ou l'influence de la charge qu'il transporte. Les auteurs montrent que ce raccourci crée des problèmes dans des bâtiments réels. Les robots peuvent arriver aux intersections plus tôt ou plus tard que prévu, augmentant le risque d'encombrement, de quasi-collisions ou de freinages brusques qui secouent leur charge.
Ajouter la physique du monde réel à l'ordonnancement
Les chercheurs comblent cette lacune avec une approche en deux étapes qui combine la physique et l'ordonnancement. D'abord, ils conçoivent un estimateur de temps de trajet dynamique pour AGV, appelé DTT-AGV. Plutôt que de traiter un couloir comme un seul bloc temporel, DTT-AGV découpe chaque déplacement en phases : accélération, croisière à vitesse constante et décélération. Il utilise un modèle mécanique simple d'un AGV portant un rayonnage, où le rayonnage se comporte comme une masse reliée par des ressorts et des amortisseurs. Ce modèle capture comment l'accélération et la décélération peuvent faire osciller ou vibrer les charges. À partir de là, l'algorithme calcule à quelle vitesse le véhicule peut se déplacer en toute sécurité sur une distance donnée et avec une charge donnée sans dépasser les limites de vitesse, de force ou de vibration, et renvoie un temps de trajet réaliste pour chaque segment du parcours.
Éviter que les robots se retrouvent nez à nez
Ensuite, l'équipe introduit une méthode de chaînage des temps d'arrivée, ATC-AGV, qui coordonne de nombreux robots sur des voies partagées. Une fois que DTT-AGV a estimé la durée de chaque segment, ATC-AGV attribue des temps d'arrivée et de départ précis à chaque nœud — intersections, virages ou points de transfert — le long de l'itinéraire de chaque robot. Il construit une « chaîne » temporelle à chaque nœud partagé, en garantissant un intervalle de sécurité entre les véhicules tout en tenant compte des états actuels des robots, par exemple s'ils sont chargés, en charge ou en train de tourner. Si un nouveau plan amène deux AGV à occuper un même nœud trop proche en temps, ATC-AGV décale l'ordonnancement de l'un des robots juste ce qu'il faut pour rétablir la marge de sécurité. En pratique, cela transforme la grille du sol de l'entrepôt en une carte sensible au temps qui aide à prévenir les collisions avant qu'elles ne surviennent.
Tester des mouvements plus fluides et des trajets plus doux
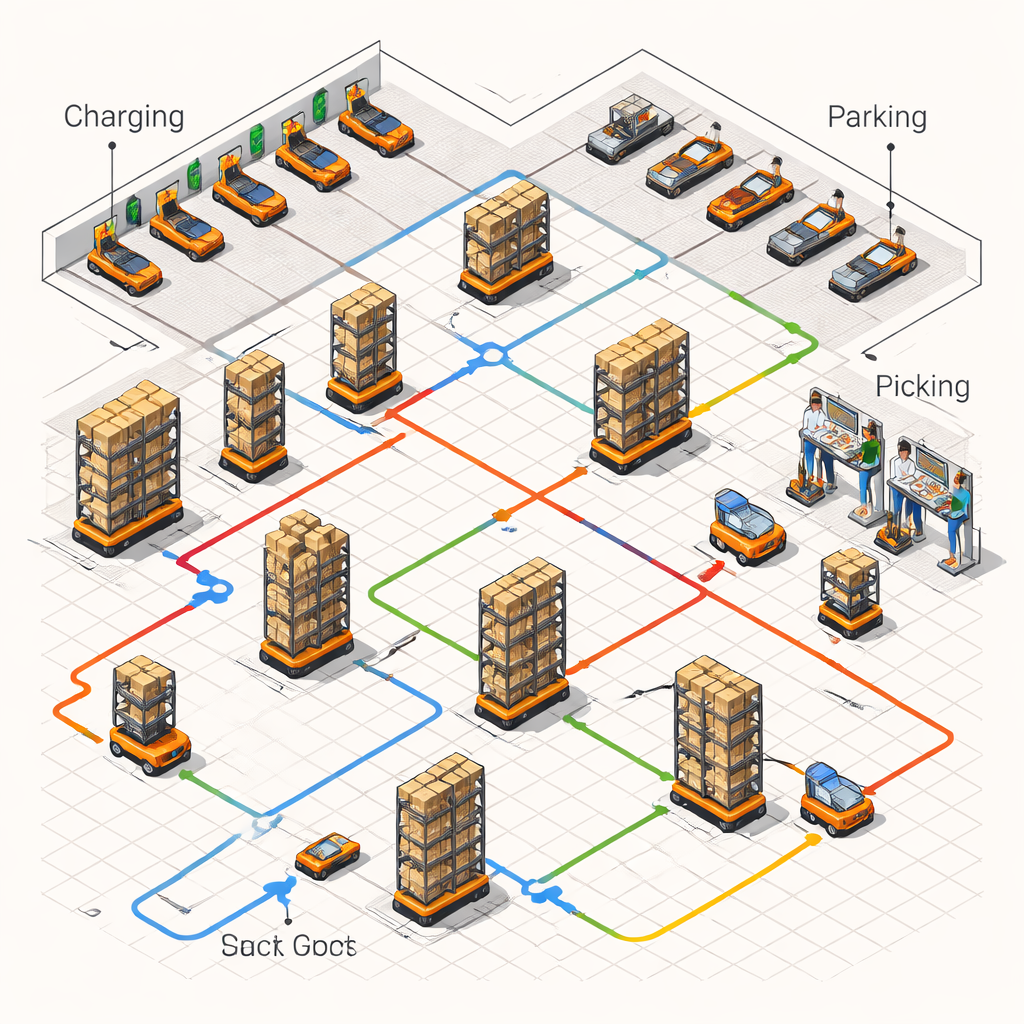
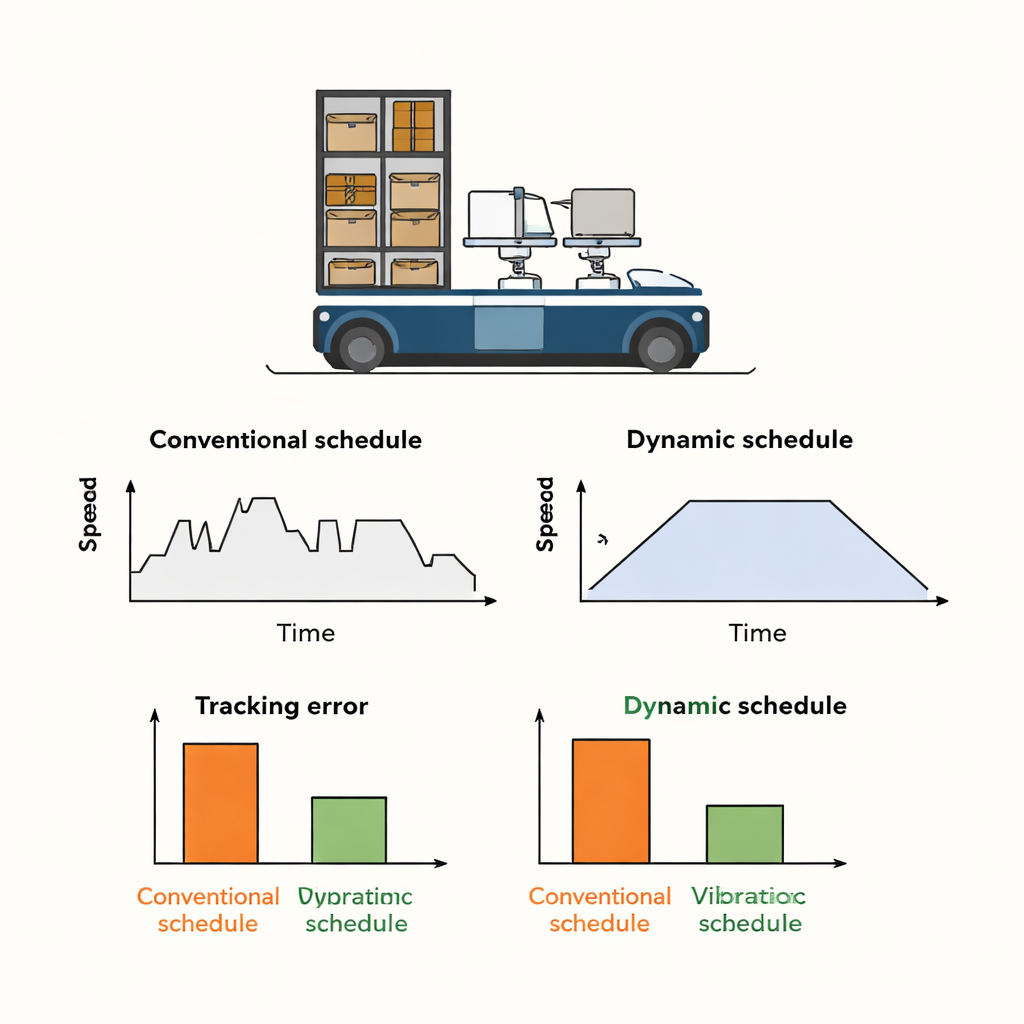
Pour tester leurs idées, les auteurs simulent des AGV dans un entrepôt de cross-docking à grille comprenant des zones de charge, des emplacements de stationnement et des zones de rayonnages. Ils comparent leur planificateur à une méthode conventionnelle qui suppose une vitesse quasi-constante et ignore les phases de mouvement détaillées. Dans un test, un robot suit un trajet en L puis tourne de 90 degrés. L'approche traditionnelle génère des changements brusques de vitesse au coin, que le robot réel ne peut pas suivre parfaitement. Le résultat est de grandes erreurs de suivi — différences entre la position prévue du robot et sa position réelle — et des pics d'erreur de synchronisation à des points clés. Avec le nouveau planificateur, le parcours est divisé en phases claires d'accélération, de croisière et de freinage. Le robot simulé suit désormais sa trajectoire cible de près, avec des erreurs beaucoup plus petites et des virages plus doux.
Plus doux pour les colis et préparé pour l'avenir
La seconde série de tests se concentre sur le comportement de la charge elle-même. Avec l'ordonnancement conventionnel, la base du robot subit des à-coups d'accélération qui excitent le comportement élastique du rayonnage, provoquant de fortes vibrations de la cargaison. Avec l'ordonnancement dynamique tenant compte de la charge, les accélérations restent dans une bande plus étroite et évoluent plus en douceur. Mesurées dans le temps, à la fois les vibrations maximales et moyennes de la charge chutent fortement, ce qui est crucial pour les articles fragiles, empilés ou instables. Les auteurs examinent également comment des facteurs négligés, comme le frottement roue-sol, pourraient affecter leurs estimations et constatent que, dans des conditions d'entrepôt typiques, l'erreur de temporisation ajoutée reste dans les marges de sécurité intégrées à leur algorithme.
Ce que cela signifie pour les entrepôts réels
En termes simples, ce travail apprend aux planificateurs d'AGV à respecter le mouvement réel des machines qu'ils contrôlent. En fondant les temps de trajet et les décisions de priorité sur la rapidité réelle d'accélération, de décélération et de transport de charges différentes sans les secouer, le cadre proposé réduit les erreurs de suivi de trajectoire, atténue les vibrations des marchandises et diminue le risque de conflits aux intersections. Pour les exploitants d'entrepôts et les fabricants, cela se traduit par un trafic plus fluide, une manutention des marchandises plus sûre et une base capable de monter en échelle à mesure que les flottes s'agrandissent et que les configurations deviennent plus complexes.
Citation: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Mots-clés: véhicules à guidage automatique, robotique d'entrepôt, ordonnancement sans collision, planification de mouvement, logistique intelligente