Clear Sky Science · fr
Méthode efficace de détection d’objectifs basée sur la transformée en ondelettes et un réseau pyramidal progressif de caractéristiques : étude de cas d’une inspection de réseau électrique
Préserver les lignes électriques des dangers cachés
L’électricité alimente la vie moderne, mais les lignes qui la transportent sont plus fragiles qu’elles n’en ont l’air. Des objets du quotidien comme des ballons, des cerfs-volants, des sacs en plastique ou des nids d’oiseaux peuvent s’emmêler dans des lignes haute tension, provoquant des étincelles, des pannes et des réparations coûteuses. Les exploitants s’appuient de plus en plus sur des drones et des caméras pour patrouiller de longues sections de câbles, mais repérer de petits objets peu contrastés dans des images encombrées reste difficile pour les humains comme pour les systèmes d’IA standards. Cette étude présente une méthode de vision par ordinateur plus rapide et plus précise qui aide les équipes d’inspection à détecter automatiquement ces dangers en temps réel.

Pourquoi les petits objets sont difficiles à repérer
Les images de corridors électriques sont visuellement trompeuses. La majeure partie de la scène est composée de zones larges et lisses comme le ciel, les champs ou les cours d’eau, tandis que les éléments critiques pour la sécurité – câbles, isolateurs et objets étrangers – sont des lignes fines ou de petites taches. Les systèmes de détection classiques comme YOLO, une famille populaire de détecteurs en temps réel, ont été conçus pour des photos quotidiennes avec des objets plus grands et plus nets comme des personnes ou des voitures. Dans l’imagerie aérienne des lignes électriques, cependant, un ballon ou un morceau de plastique peut n’occuper que quelques pixels et se confondre avec les pylônes ou les fils. Le résultat : des omissions fréquentes, de fausses alertes sur des structures d’arrière-plan et des performances instables lorsque la scène devient chargée.
Apprendre à l’IA à lire les images par fréquence
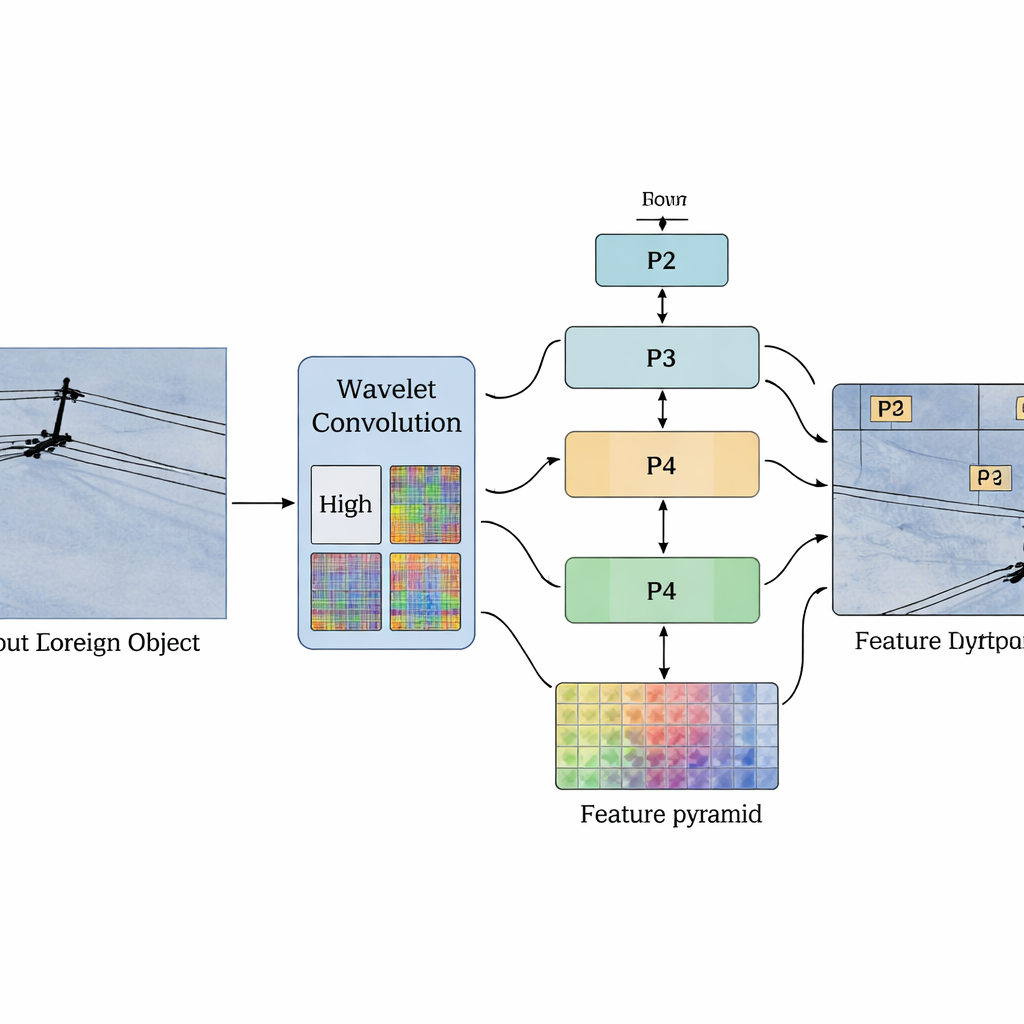
Les auteurs abordent ce problème en modifiant la façon dont le réseau neuronal « regarde » les images. Plutôt que de traiter tout uniquement sur la grille de pixels habituelle, ils ajoutent une couche de convolution basée sur les ondelettes appelée WTConv. Les ondelettes divisent une image en parties basse fréquence qui captent les régions d’arrière-plan lisses et en parties haute fréquence qui mettent en valeur les contours et les détails fins. Dans cette architecture, le réseau traite ces composantes séparément puis les recombine sans perte d’information. Cela lui permet de conserver le contexte large du corridor tout en affinant les structures telles que les fils, les pylônes et les petits objets étrangers — sans alourdir ni ralentir le modèle.
Empiler les caractéristiques pour voir à différentes échelles
Détecter un nid d’oiseau perché sur un bras de pylône ou un cerf-volant enchevêtré sur plusieurs fils nécessite aussi de comprendre comment les motifs se relient à travers différentes tailles dans l’image. Pour cela, l’étude introduit un réseau pyramidal de caractéristiques progressif (PFPN). Il prend des caractéristiques issues des couches peu profondes et profondes du réseau et les fusionne en deux passes : d’abord du grossier vers le fin, puis inversement du fin vers le grossier. Une étape de « fusion adaptative » apprend, pour chaque position, quelle proportion faire confiance à chaque échelle. Cet empilement progressif produit des cartes de caractéristiques mieux alignées avec les objets étrangers réels et réduit la confusion lorsque de petits dangers chevauchent de grandes structures métalliques.
Ajuster la façon dont les boîtes sont tracées
Même lorsqu’un modèle devine le bon objet, il doit encore dessiner une boîte précise autour de celui-ci. Les règles d’entraînement courantes se concentrent sur le recouvrement entre la boîte prédite et la vraie boîte, mais cela peut être trompeur pour des cibles minuscules et faibles. Les chercheurs affinent cette étape avec une nouvelle fonction de perte « Inner-EIoU », qui accorde une attention particulière à la correspondance des régions centrales des boîtes. En récompensant un alignement serré dans la zone centrale, la méthode aide le modèle à verrouiller la position réelle d’objets étrangers petits ou partiellement cachés, rendant les détections finales plus fiables.
Montrer les gains dans le monde réel
Pour évaluer leur conception, l’équipe a constitué un jeu de données spécialisé de 4 700 images issues de véritables corridors haute tension, couvrant des scènes urbaines et rurales et annotant quatre types de danger courants : déchets, ballons, nids d’oiseaux et cerfs-volants. Par rapport à une référence standard YOLOv11, le modèle amélioré détecte davantage de ces objets tout en commettant moins d’erreurs, augmentant à la fois la précision et les scores globaux de détection. Dans le même temps, il utilise environ cinq fois moins de paramètres et s’exécute environ 18 % plus vite, ce qui le rend bien adapté aux drones ou aux dispositifs embarqués devant fonctionner en temps réel. Des tests sur une large référence publique (MS COCO) montrent des améliorations similaires, suggérant que les idées se généralisent au-delà des lignes électriques. Concrètement, cela signifie que les exploitants peuvent déployer des systèmes d’inspection plus intelligents et plus légers, capables de repérer mieux les petits dangers avant qu’ils ne provoquent de gros problèmes.
Citation: Ye, J., Yuqi, B., Wendi, W. et al. Efficient target detection method based on wavelet transform and progressive feature pyramid network: a case study of power grid inspection. Sci Rep 16, 7318 (2026). https://doi.org/10.1038/s41598-026-37017-9
Mots-clés: inspection de réseau électrique, détection d’objets étrangers, imagerie par drone, vision par ordinateur en temps réel, lignes de transmission haute tension