Clear Sky Science · fr
Détection d’objets sur des SoC Edge à faible calcul : un benchmark reproductible et des conseils de déploiement
Pourquoi les puces minuscules sont importantes pour les caméras intelligentes
Beaucoup des appareils « intelligents » qui nous entourent — caméras de surveillance, drones, capteurs industriels et sonnettes — doivent repérer des personnes et des objets en temps réel, mais ils s’appuient sur des puces très petites et à faible consommation plutôt que sur du matériel énergivore de centre de données. Les entreprises choisissent souvent des modèles YOLO populaires pour la détection d’objets, mais les performances annoncées des puces disent peu sur le comportement réel sur le terrain. Cet article examine de manière expérimentale comment neuf variantes modernes de YOLO se comportent sur trois processeurs Rockchip largement utilisés et peu coûteux, révélant ce qui contrôle réellement la rapidité, la consommation d’énergie et la fiabilité quand l’intelligence migre vers l’edge.
Trois puces du quotidien passées au microscope
Les auteurs se concentrent sur trois systèmes-sur-puce (SoC) commerciaux qui alimentent discrètement de nombreux systèmes de vision embarquée : le petit RV1106, le milieu de gamme RK3568 et le plus capable RK3588. Chacun combine des cœurs processeur classiques avec une unité de traitement neuronal (NPU) dédiée et une mémoire externe. Sur ces plates-formes, l’équipe déploie neuf modèles YOLO — trois générations (YOLOv5, YOLOv8, YOLO11) à trois tailles (Nano, Small, Medium) — tous entraînés sur le même jeu de données de référence. Ils convertissent soigneusement les modèles dans un format commun, les quantifient en arithmétique 8 bits, les compilent avec les outils de Rockchip, puis exécutent des centaines de tests temporisés pour obtenir des mesures stables de latence, de puissance et d’énergie par image traitée.
La vitesse n’est pas ce que suggère la fiche technique
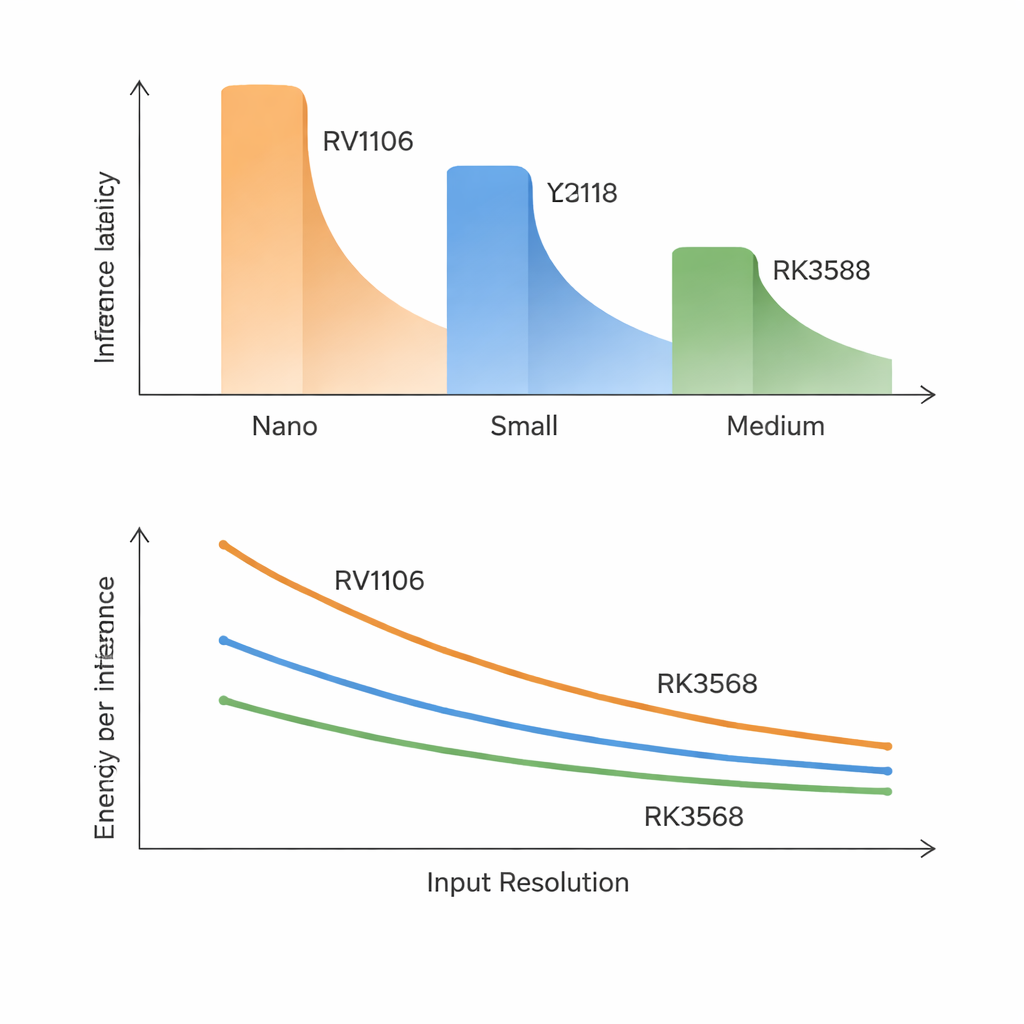
Une des leçons les plus claires est que les chiffres classiques des modèles et des puces prédisent mal la vitesse réelle. Sur la puce la plus lente, même les plus petits modèles nécessitent environ 70–100 millisecondes par image et les modèles de taille moyenne sont bien trop lents pour une utilisation en temps réel. La puce la plus rapide peut faire tourner les modèles Nano et beaucoup de Small proche de la marque de 30 images par seconde, mais les modèles plus volumineux restent en deçà des objectifs de très haut débit. Fait surprenant, la latence se rapproche davantage de la précision d’un modèle que du nombre d’opérations mathématiques ou de paramètres qu’il contient. Les conceptions YOLO plus récentes et plus précises ajoutent des blocs internes favorables à la précision mais difficiles à exécuter pour ces NPU, de sorte que « plus intelligent » signifie souvent « sensiblement plus lent » sur ce type de matériel.
Quand des images plus grandes et la mémoire partagée se retournent contre vous
L’étude montre que l’augmentation de la taille des images d’entrée n’accroît pas simplement la charge de manière lisse. En théorie, doubler largeur et hauteur devrait quadrupler le coût, mais sur des puces à faible bande passante cela peut croître encore plus vite. À mesure que les images grossissent, les données intermédiaires ne tiennent plus confortablement et doivent être renvoyées à plusieurs reprises vers la mémoire hors puce. Sur les SoC les plus petits et de milieu de gamme, cela se transforme en embouteillage : les modèles de taille moyenne ralentissent bien plus que prévu, et une utilisation élevée de la mémoire par d’autres tâches peut gonfler les latences de 50 à 270 %. En revanche, le RK3588, avec une bande passante mémoire bien supérieure, gère l’augmentation de résolution avec grâce et réagit à peine sous une charge CPU ou mémoire supplémentaire, mettant en évidence que la vitesse de la mémoire — et non la simple puissance de calcul — est souvent le véritable goulot d’étranglement.
Plus de cœurs et plus de puissance n’assurent pas l’efficacité
La puce la plus rapide de Rockchip inclut un NPU à trois cœurs, mais exécuter YOLO sur plusieurs cœurs n’apporte que des gains modestes. Pour la plupart des modèles, répartir le travail sur deux ou trois cœurs réduit la latence de moins de 10 %, et parfois les performances se dégradent même. Le surcoût de coordination des cœurs et le partage d’un même pool mémoire annulent une grande partie du gain théorique. Les mesures de consommation ajoutent une autre nuance : les trois SoC ne consomment que quelques watts en fonctionnement, pourtant leur énergie par image traitée peut différer d’un facteur trois. Le RK3588 haut de gamme consomme plus à l’instantané, mais termine les tâches si rapidement qu’il s’avère souvent le choix le plus économe en énergie, surtout pour les modèles de taille moyenne et les résolutions élevées.
Conclusions pratiques pour les dispositifs du monde réel
Pour les lecteurs qui envisagent des caméras intelligentes, des robots ou des objets connectés, le message est simple. Sur les puces les plus petites, seuls les modèles YOLO les plus minuscules à des tailles d’image modérées sont pratiques, et même alors la vidéo en temps réel reste difficile. Les puces milieu de gamme peuvent prendre en charge confortablement des modèles Small et parfois Medium si les exigences de fréquence d’images ou d’autonomie peuvent être relâchées. Le RK3588 haut de gamme rend enfin réaliste l’exécution de variantes YOLO plus précises et de taille moyenne tout en maintenant l’énergie par image sous contrôle. Globalement, l’article soutient que les concepteurs doivent choisir des modèles en gardant le matériel à l’esprit, prêter une grande attention à la bande passante mémoire et privilégier les astuces économisant la mémoire plutôt que la course aux réseaux toujours plus grands. Ce qui importe en fin de compte ce n’est pas le nombre annoncé de tera-opérations par seconde, mais si l’ensemble du système peut fournir une détection d’objets rapide, stable et économe en énergie dans les conditions désordonnées du monde réel.
Citation: Kong, C., Li, F., Yan, X. et al. Object detection on low-compute edge SoCs: a reproducible benchmark and deployment guidelines. Sci Rep 16, 5875 (2026). https://doi.org/10.1038/s41598-026-36862-y
Mots-clés: edge IA, détection d’objets, vision embarquée, modèles YOLO, SoC basse consommation