Clear Sky Science · fr
Perchage de quadrotor par commande continue adaptative d’ordre deux en présence d’incertitudes
Pourquoi il est utile que les drones s’accrochent aux murs
Imaginez un petit drone qui ne se contente pas de stationner jusqu’à ce que sa batterie s’épuise, mais qui peut se poser discrètement sur un mur comme un oiseau, puis rester là des heures à surveiller un pont, une parcelle agricole ou la lisière d’une forêt. Cet article présente une nouvelle façon de commander de tels drones « perchés » pour qu’ils puissent voler jusqu’à une surface verticale, entrer en contact sans rebondir, et s’y maintenir de façon stable même lorsque l’air est turbulent ou que le comportement du drone n’est pas parfaitement connu. Le travail relève le défi de transformer une machine volante fragile en un outil d’inspection fiable et économe en énergie.
Des robots en vol stationnaire aux éclaireurs qui s’agrippent aux murs
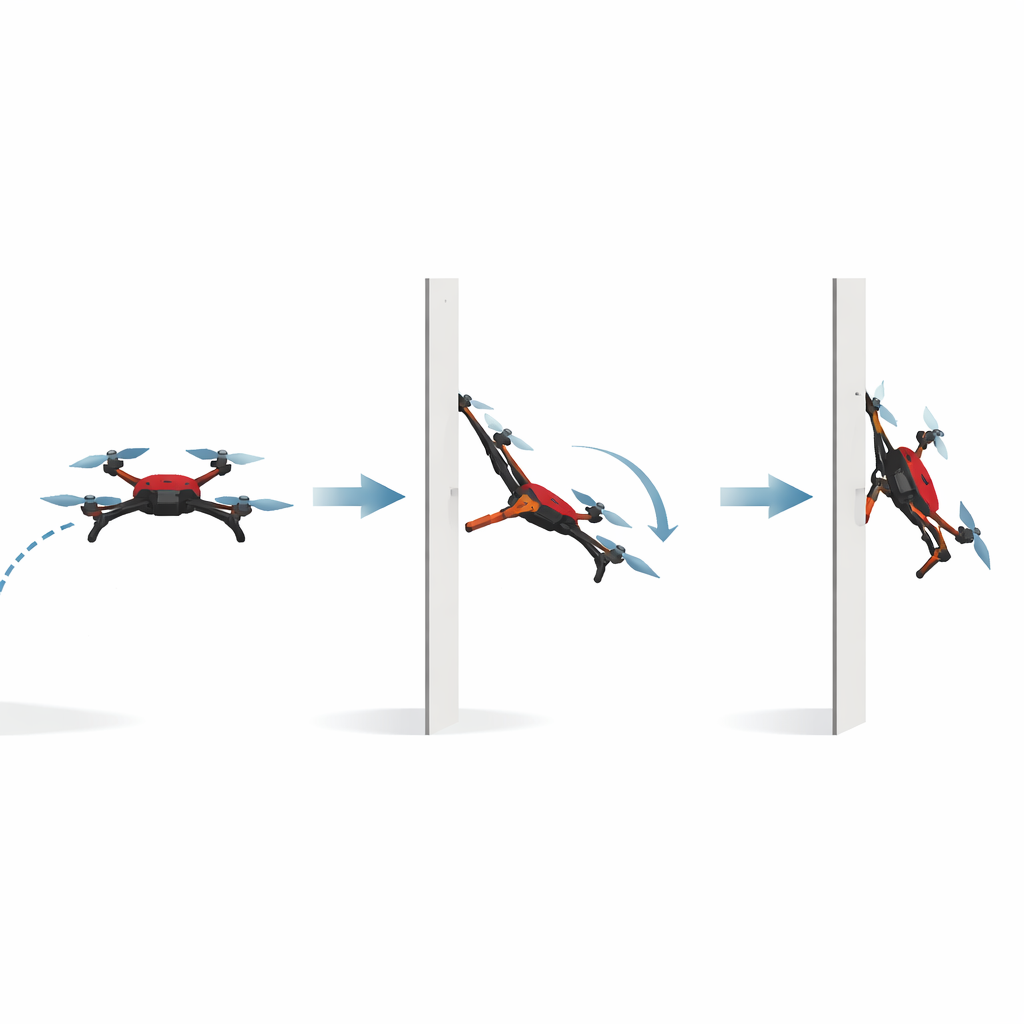
Les petits drones à quatre rotors, ou quadrotors, sont déjà utilisés pour la cartographie, l’inspection de structures, la surveillance de la faune et l’agriculture de précision. Leur principale limitation reste l’endurance : le vol stationnaire consomme beaucoup de batterie. Le perchage sur une surface — comme un mur, un poteau ou le sous‑face d’un pont — permet au drone d’arrêter la plupart de ses moteurs tout en gardant ses capteurs en place pour une observation de longue durée. Réussir cela en toute sécurité est loin d’être trivial. Lors de la manœuvre brève mais critique de perchage, le drone doit approcher la paroi, la toucher et pivoter en position nez vers le bas sans rebondir, glisser ou perdre le contrôle lorsque des rafales inattendues ou des erreurs de modélisation perturbent son mouvement.
Le défi d’un atterrissage propre sur une paroi
Les auteurs étudient un quadrotor équipé d’un bras de support léger à l’avant, qui sert de point de contact physique avec le mur. Lorsque le drone passe du vol libre au contact, sa position (déplacements latéraux, avant‑arrière, haut‑bas) et son assiette (angles de roulis, tangage, lacet) sont étroitement couplées : modifier l’orientation change la façon dont la poussée se traduit en mouvement, et la force de réaction soudaine du mur peut tordre la structure du drone. À cela s’ajoutent des effets du monde réel — interactions aérodynamiques près de la paroi, petites imprécisions de construction et bruit de capteur — qui agissent comme des perturbations inconnues. Les techniques de commande robuste existantes peuvent maintenir la stabilité, mais elles provoquent souvent un « chattering » haute fréquence dans les commandes des moteurs, usent le matériel et ne garantissent que la décroissance progressive des erreurs plutôt qu’une convergence dans un laps de temps court et prévisible.
Une méthode plus intelligente pour équilibrer et s’adapter
Pour surmonter ces problèmes, l’article introduit un schéma de commande continue adaptative d’ordre deux (ASOCC). En termes simples, le contrôleur prend en compte non seulement l’écart entre le mouvement du drone et la consigne, mais aussi la vitesse de variation de cet écart, et façonne ses commandes pour que les deux s’annulent en temps fini. Un observateur de perturbation intégré agit comme un « écouteur de bruit » en temps réel, estimant l’effet net des forces inconnues et des erreurs de modèle et réinjectant cette information dans la loi de commande. Surtout, les gains qui déterminent l’intensité de la réaction du contrôleur sont ajustés en continu sur la base de ces estimations, plutôt que d’être fixés a priori. Parce que les signaux de commande évoluent de manière lisse au lieu de commuter brusquement, la conception réduit fortement le phénomène de chattering tout en conservant une grande robustesse.
Évaluation du nouveau contrôle
Les chercheurs analysent d’abord la mathématique de leur couple observateur‑contrôleur et prouvent, à l’aide de fonctions de type Lyapunov énergétiques, que toutes les erreurs de mouvement convergent vers zéro en temps fini malgré des perturbations bornées. Ils simulent ensuite des scénarios de perchage agressifs en logiciel, en soumettant le modèle du drone à des forces semblables au vent, à du bruit de mesure aléatoire et à des erreurs intentionnelles de paramètres physiques. Dans ces essais, l’ASOCC a guidé le drone à travers trois phases — préparation, approche et perchage — tout en maintenant les erreurs de position et d’orientation faibles et les commandes fluides. Comparée à plusieurs alternatives avancées, y compris des contrôleurs en mode glissant et basés sur un modèle, la nouvelle méthode a réduit les mesures clés d’erreur de suivi d’environ 35 à 55 %.
De la simulation au drone réel accroché à un mur
Au‑delà des simulations, l’équipe a construit un quadrotor miniature de perchage en utilisant une carte de vol commerciale et une structure imprimée en 3D avec un bras frontal. Dans des expériences en intérieur, le drone a volé de façon autonome vers une paroi inclinée, s’est élevé à environ un mètre, puis s’est incliné pour entrer en contact et rester accroché. Les séries temporelles montrent que l’altitude, la position horizontale et l’angle de tangage suivent étroitement leurs trajectoires souhaitées, avec seulement de petites ondulations dues au bruit des capteurs. Malgré du matériel bon marché, des retards de communication et des limites d’actionneurs, le drone n’a pas rebondi ni oscillé après l’impact, démontrant que l’ASOCC peut gérer les réalités imparfaites du vol.
Ce que cela signifie pour les inspecteurs volants de demain
Pour un public non spécialiste, le résultat principal est simple : ce travail propose une stratégie de commande qui permet à de petits drones de s’accrocher de manière fiable à des surfaces verticales et d’y rester, même lorsque les conditions sont imparfaites. En combinant une commande lisse mais fortement corrective avec un observateur de perturbation adaptatif, la méthode permet un perchage rapide et précis sans les secousses et la fatigue du matériel observées avec de nombreux contrôleurs robustes. Cela ouvre la voie à une surveillance aérienne de longue durée avec des batteries plus légères, des plateformes plus simples et une plus grande sécurité — une étape importante vers des flottes de robots autonomes « accrochés aux murs » qui veillent discrètement sur des infrastructures, des cultures et des milieux naturels.
Citation: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Mots-clés: perchage de quadrotor, commande adaptative, inspection par drone, observateur de perturbation, robotique aérienne