Clear Sky Science · fr
Un modèle léger basé sur YOLO pour la détection précise des grappes de poivre rouge en récolte robotique
Des robots plus intelligents pour des récoltes épicées
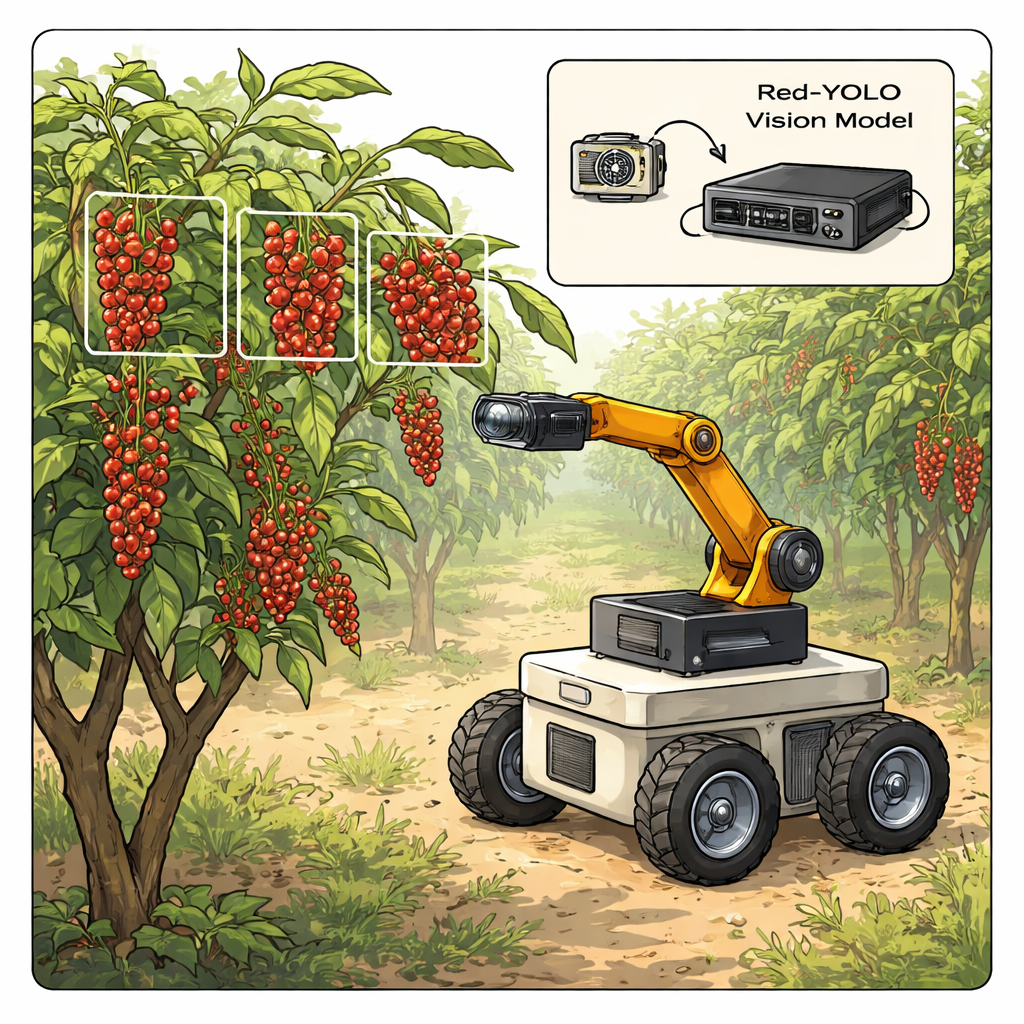
Les baies de poivre du Sichuan, ces petites enveloppes rouges qui donnent à la cuisine sichuanaise son picotement caractéristique, sont étonnamment difficiles à cueillir. Les fruits poussent en grappes denses et épineuses qui peuvent facilement être endommagées, et la récolte manuelle est lente et saisonnière. Cette étude présente un nouveau système de vision par ordinateur, appelé Red-YOLO, conçu pour aider de petits robots mobiles à repérer rapidement et avec précision ces grappes délicates dans de vrais vergers, même lorsque les fruits se chevauchent ou sont partiellement cachés par des feuilles.
Pourquoi la cueillette du poivre est si compliquée
Contrairement aux gros fruits lisses comme les pommes, les baies de poivre rouge poussent en de nombreuses petites baies serrées sur des branches épineuses. Les grappes peuvent varier fortement d’un arbre à l’autre : certaines sont compactes et serrées, d’autres lâches et diffusées, et toutes sont entourées d’arrière-plans confus faits de branches, de feuilles et de jeux de lumière variables. Pour un robot, distinguer où une grappe se termine et où commence la suivante — et à quel degré chaque grappe est compacte — est essentiel. La force de préhension et même la taille de l’outil de cueillette doivent varier selon la densité des fruits, sinon les sacs d’huile fragiles des piments peuvent éclater, réduisant la qualité et la valeur.
Constitution d’une bibliothèque d’images en conditions réelles
Faute de collections d’images publiques pour cette culture, les chercheurs ont d’abord dû créer leur propre jeu de données. Sur deux saisons de croissance dans le comté de Hanyuan, au Sichuan, ils ont photographié des poivriers dans de vrais vergers avec un smartphone grand public, capturant 960 images carrées haute résolution sous différents angles du soleil et moments de la journée. Chaque image a été soigneusement annotée à la main, en distinguant les grappes compactes des grappes diffuses. Pour apprendre au système à gérer la variété, ils ont modifié numériquement de nombreuses images — ajustant luminosité et contraste, les retournant horizontalement, déformant certains motifs et faisant pivoter les vues. Cela a porté l’ensemble d’entraînement à plus de 4 300 images, tandis qu’un petit ensemble de photos non modifiées a été mis de côté pour tester honnêtement les performances finales du système.
Un modèle de vision par ordinateur plus léger et plus net
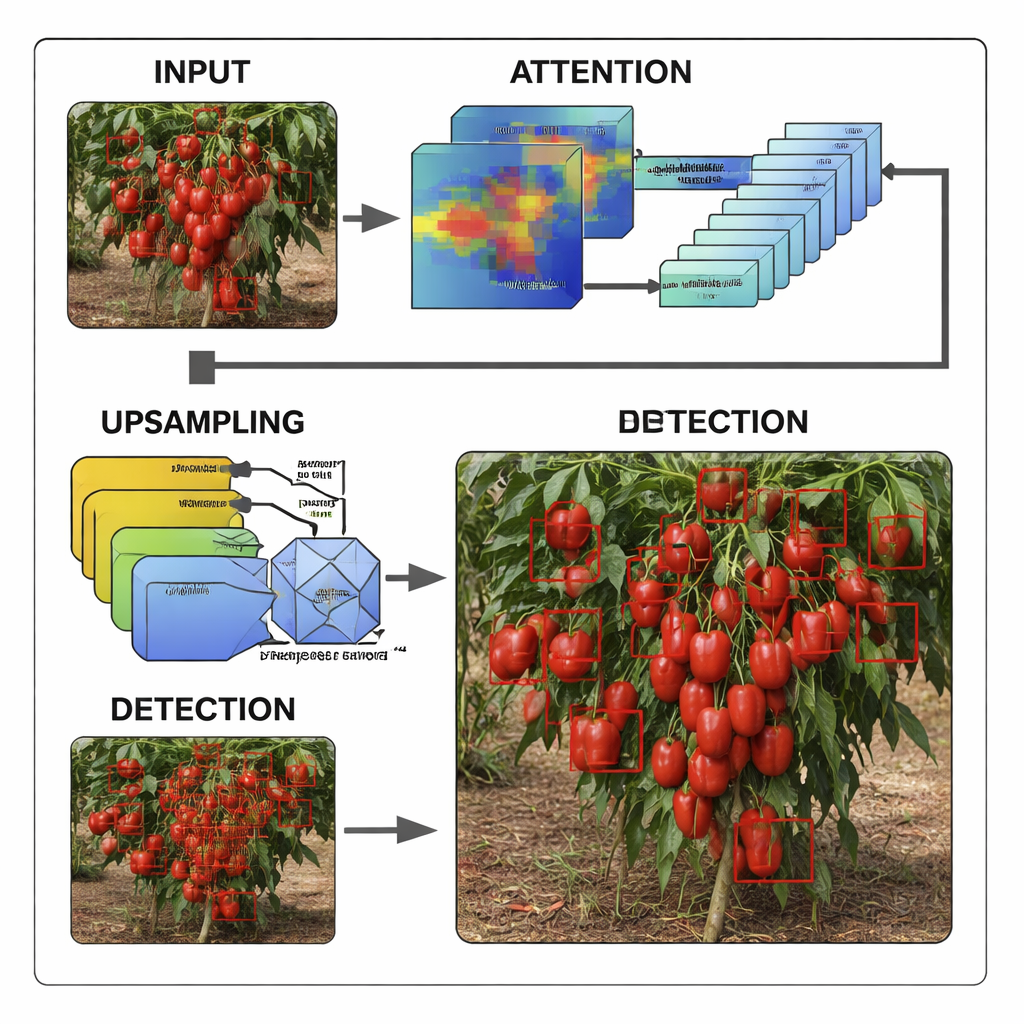
Au cœur du système se trouve YOLOv8, un modèle de détection d’objets largement utilisé qui repère les objets en un seul passage rapide plutôt que par plusieurs étapes plus lentes. L’équipe a adapté une version très compacte de ce modèle puis l’a remodelée spécifiquement pour les grappes de poivre rouge. Ils ont ajouté un module d’attention qui apprend au réseau à se concentrer sur les canaux et les régions les plus susceptibles de contenir des fruits tout en ignorant les distractions comme le ciel, les branches et les arbres lointains. Ils ont repensé des parties du réseau pour réutiliser l’information de façon plus efficace et réduire les calculs inutiles. Ils ont également remplacé une simple étape de redimensionnement par un bloc d’upsampling plus intelligent qui reconstruit les détails fins et les contours autour des poivrons qui se chevauchent, aidant le modèle à distinguer où commencent et finissent les grappes denses.
Vision rapide et précise pour petits robots
Pour évaluer l’intérêt de ces modifications, les chercheurs ont comparé Red-YOLO à la fois aux anciens systèmes de détection plus lourds et à plusieurs variantes modernes légères de YOLO. Les modèles traditionnels en plusieurs étapes, bien que puissants, étaient tout simplement trop lents et gourmands en ressources pour des robots compacts de verger. Plusieurs versions plus récentes de YOLO s’en sont mieux sorties mais ont peiné avec les petites grappes partiellement cachées ou les arrière-plans encombrés, manquant souvent des fruits ou confondant des feuilles avec des poivrons. Red-YOLO a trouvé un meilleur compromis : il a détecté les grappes de poivre avec une précision et un rappel globaux supérieurs à tous les modèles comparés, tout en maintenant la taille du modèle en dessous de trois millions de paramètres et une charge de calcul suffisamment faible pour des processeurs embarqués. Des tests dans des scènes variées de verger ont montré que Red-YOLO trouvait systématiquement les grappes même lorsque les fruits étaient minuscules, ombragés ou fortement chevauchés.
Du modèle de laboratoire à l’assistant de verger
Pour les non-spécialistes, le résultat clé est pratique : ce travail montre qu’un système de vision compact et finement réglé peut donner aux petits robots de récolte un « œil » fiable sur le terrain. Avec Red-YOLO, un robot peut automatiquement déterminer s’il s’agit d’une grappe compacte ou diffuse et ajuster la taille et la force de sa pince avant la cueillette, réduisant les dommages et économisant de la main-d’œuvre. Bien que l’étude actuelle se concentre sur une variété de poivre d’une seule région, la même approche — constituer des jeux de données ciblés et affiner des modèles de détection légers — pourrait être étendue à d’autres cultures spécialisées. À mesure que ces systèmes de vision deviennent plus robustes et plus largement déployés, ils pourraient contribuer à rendre la récolte plus rapide, plus sûre et plus uniforme, assurant un approvisionnement régulier des piments qui alimentent certaines des saveurs préférées du monde.
Citation: Zhao, H., He, J., Li, Y. et al. A lightweight YOLO-based model for accurate detection of red pepper clusters in robotic harvesting. Sci Rep 16, 5879 (2026). https://doi.org/10.1038/s41598-026-36671-3
Mots-clés: récolte robotique, détection de poivron, vision par ordinateur, YOLO léger, agriculture intelligente