Clear Sky Science · fr
Développement d’un robot de soins aux patients intelligent avec navigation autonome améliorée par optimisation des parcours dans les services hospitaliers
Des robots qui aident les infirmières, pas qui les remplacent
Les hôpitaux du monde entier sont sous pression : davantage de patients âgés, plus de maladies chroniques et un personnel à bout de souffle. Cette étude décrit un robot de soins aux patients intelligent conçu non pas pour se substituer aux soignants, mais pour prendre discrètement en charge les tâches répétitives de surveillance et les rondes nocturnes dans les services. En se déplaçant de manière sûre et fiable de façon autonome, ce robot pourrait aider les infirmières à détecter plus tôt des urgences — chutes ou fièvres soudaines — tout en allégeant leur charge de travail et en réduisant le risque d’accidents dans des couloirs encombrés et des encadrements de porte étroits.
Pourquoi les couloirs d’hôpital posent problème aux robots
À première vue, un corridor d’hôpital paraît simple : lignes droites, sols propres, portes régulières. Pour un robot, c’est tout le contraire. Lits, chariots, cloisons et surtout des cadres de porte étroits créent des espaces confinés où la moindre erreur peut provoquer une collision. De nombreux robots hospitaliers actuels comptent sur un ensemble de capteurs et un matériel complexe pour faire face à cela. L’équipe à l’origine de cette étude a choisi une voie différente : concevoir un robot capable de se déplacer en toute sécurité en s’appuyant sur un seul capteur principal — un scanner laser bidimensionnel qui mesure les distances autour de lui — et sur une méthode plus intelligente de planification des trajets.

Donner aux infirmières une paire d’yeux supplémentaire
Les chercheurs ont développé un robot de soins aux patients intelligent (SPCR) sur la base d’un châssis commercial à roues. Sur sa structure, ils ont installé une caméra 3D pour repérer les chutes et relever des signes vitaux sans contact avec le patient, ainsi qu’un capteur laser 2D sur le dessus pour scanner en continu les environs en cercle complet. À l’intérieur du robot se trouvent un ordinateur embarqué, des batteries, des contrôleurs de moteurs et de l’électronique de communication qui lui permettent de dialoguer avec une application de contrôle et de gérer ses propres décisions de conduite. Le robot peut se déplacer dans toutes les directions, orienter un bras de caméra pour regarder les patients et est conçu pour fonctionner plusieurs heures d’affilée dans des conditions hospitalières réelles.
Une carte plus intelligente plutôt que davantage de matériel
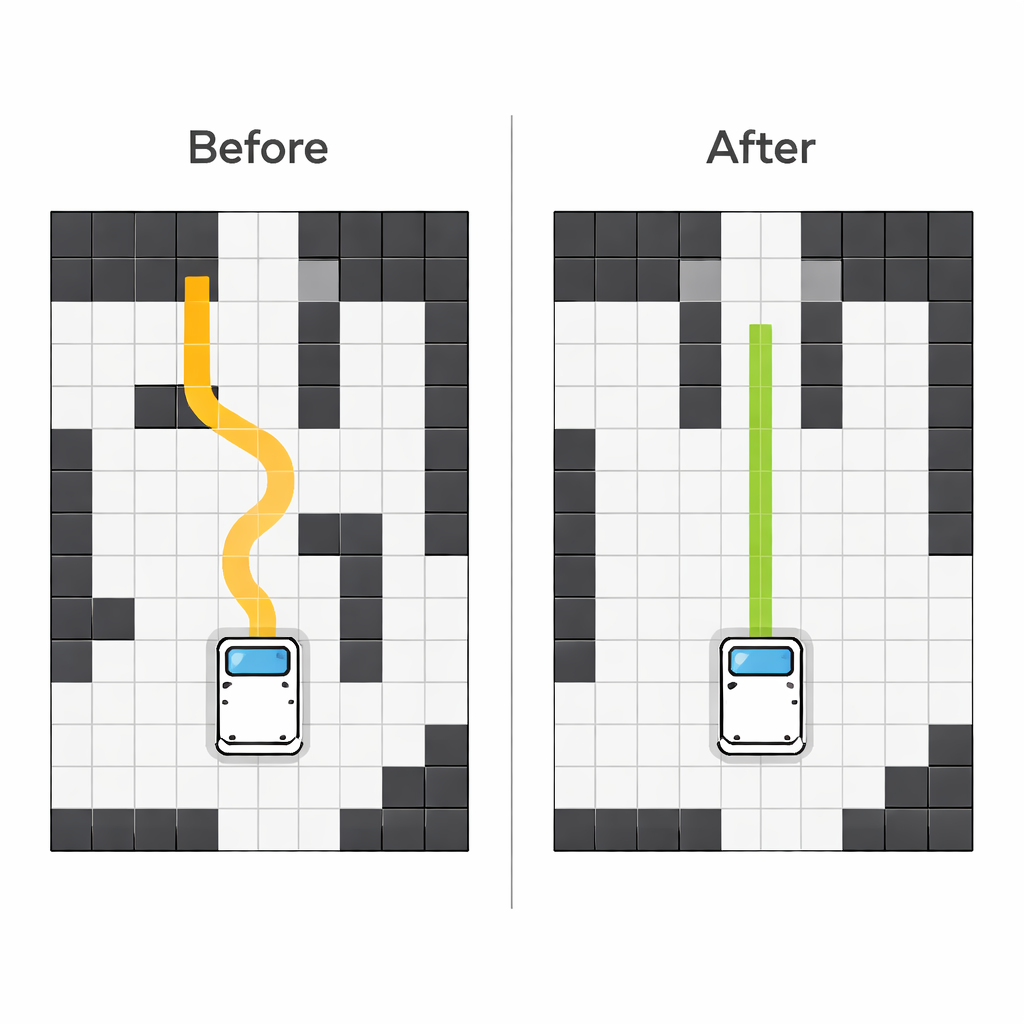
Pour naviguer, le robot a d’abord besoin d’une carte indiquant où il peut ou ne peut pas aller. L’équipe est partie de plans précis d’un couloir d’hôpital et les a convertis en carte en grille, où chaque petite case est étiquetée comme espace libre, mur ou obstacle. Au lieu de conserver la carte telle quelle, ils l’ont remodelée pour qu’elle soit plus prudente que la réalité. Ils ont introduit des « zones d’obstacle virtuel » — des zones supplémentaires bloquées qui repoussent doucement le robot loin des points à risque tels que les bords de porte et les coins serrés. Le logiciel de planification de trajectoire, basé sur une version améliorée de l’algorithme D* Lite, explore ensuite cette carte plus sûre pour trouver des itinéraires évitant les virages brusques et maintenant le robot plus près du centre des passages étroits.
Tester le robot dans des services réels
Le système a été testé dans un véritable couloir d’hôpital divisé en trois sections présentant différentes combinaisons de couloirs, portes et obstacles. Le robot devait se déplacer entre des points de contrôle, franchir des portes standards de 90 centimètres de large et éviter murs et objets fixes. Comme le robot lui‑même mesure environ 76 centimètres de large, il ne disposait que de quelques centimètres de dégagement de chaque côté en traversant les portes — des conditions où de nombreux robots ont du mal. En comparant les performances avant et après l’ajustement de la carte en grille, les chercheurs ont constaté que le taux de réussite du robot à accomplir ses trajets sans toucher quoi que ce soit augmentait de plus de 30 % dans toutes les sections, avec des parcours plus fluides et moins de manœuvres inutiles.
Ce que cela signifie pour les soins futurs aux patients
Pour les non‑spécialistes, le message clé est simple : plutôt que d’alourdir les robots avec toujours plus de capteurs, cette étude montre qu’une conception numérique soignée des cartes et une planification de parcours plus intelligente peuvent rendre les robots hospitaliers à la fois plus sûrs et plus pratiques. Un robot capable de se faufiler de manière fiable dans des portes étroites la nuit, de suivre des trajets efficaces et de vérifier discrètement les signes vitaux de base des patients pourrait libérer les infirmières pour se concentrer sur les soins humains — réconforter les familles, prendre des décisions complexes et gérer les urgences. Les auteurs considèrent ce travail comme une base : les versions futures ajouteront davantage de capteurs et des fonctions de surveillance des patients plus riches, en visant des assistants robotiques fiables, disponibles 24 h/24 et se déplaçant en toute sécurité dans des environnements hospitaliers réels.
Citation: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
Mots-clés: robots hospitaliers, navigation autonome, surveillance des patients, cartographie LiDAR, planification de trajectoire