Sur le fond marin, les véhicules sous-marins autonomes servent d'yeux et d'oreilles pour la recherche climatique, l'inspection d'infrastructures et les opérations de recherche et de sauvetage. Pourtant, ces sous-marins robotisés butent sur un problème fondamental : communiquer et décider clairement dans un environnement hostile où les signaux sont lents, bruités et l'énergie limitée. Cet article présente une nouvelle méthode pour aider les robots sous-marins à communiquer, repérer des objets et rester sécurisés en combinant réalité augmentée et virtuelle avec une branche de l'intelligence artificielle appelée apprentissage par renforcement.
Pourquoi la communication sous-marine est si difficile
Transmettre des données sous l'eau est bien plus ardu que dans l'air. Les ondes radio, qui alimentent le Wi‑Fi et la 5G, sont rapidement absorbées par l'eau de mer. Les signaux acoustiques (basés sur le son) parcourent de plus longues distances mais offrent des débits très faibles et peuvent subir des retards, des échos ou des distorsions. L'induction magnétique ne fonctionne que sur quelques dizaines de mètres. Les systèmes de contrôle existants pour robots sous-marins traitent souvent ces canaux séparément et appliquent des règles fixes pour la navigation et la détection. Cela les rend lents à s'adapter aux changements, gaspille la batterie et laisse les liaisons de communication vulnérables à l'écoute clandestine ou aux attaques.
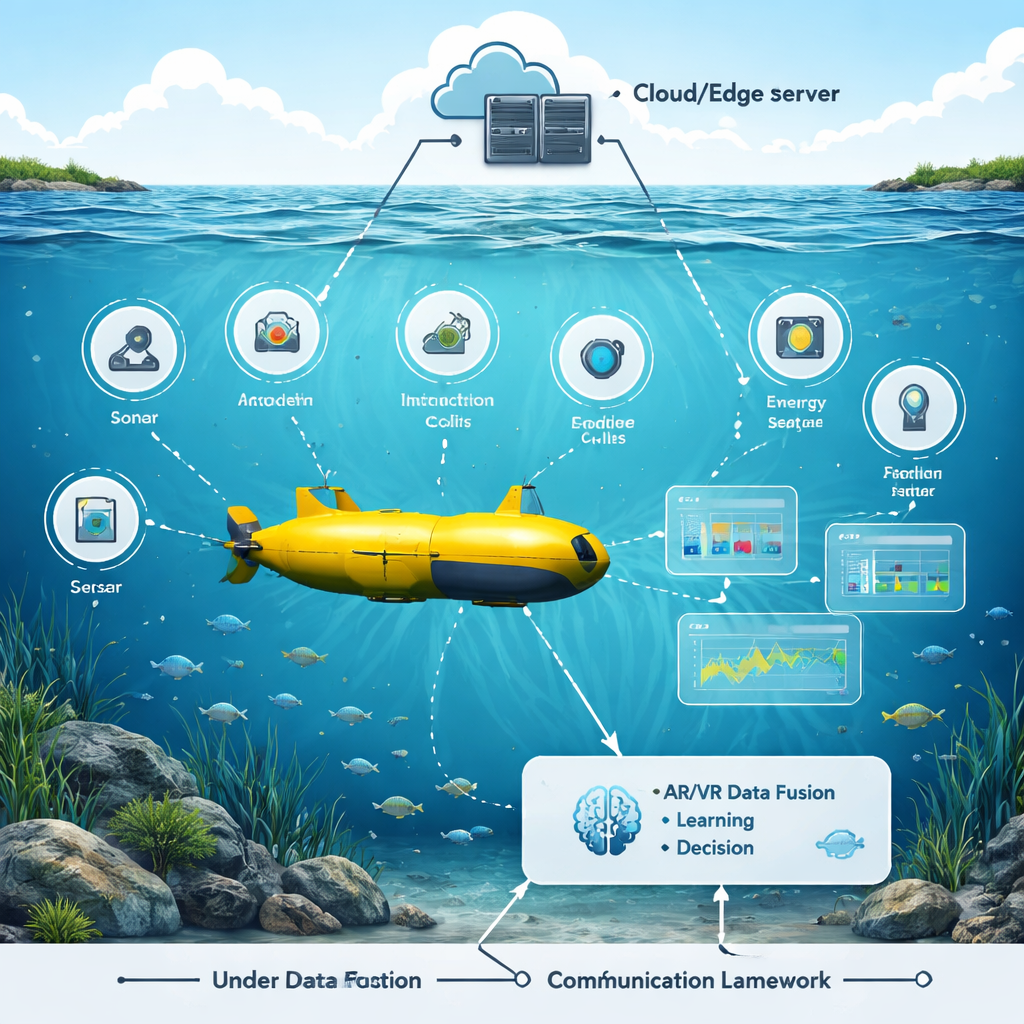
Un océan virtuel pour entraîner de meilleurs réflexes Figure 1.
Les auteurs ont construit un banc d'essai en réalité augmentée et virtuelle qui recrée un monde sous-marin animé : poissons en mouvement, rochers, bateaux et bouées, avec un bruit et une atténuation des signaux réalistes dans l'eau. Un véhicule sous-marin simulé navigue dans cet environnement en utilisant de nombreux capteurs : sonar, caméras, modems acoustiques, compteurs d'énergie et traceurs de position. Dans la scène virtuelle, les chercheurs peuvent ajuster des commandes pour changer la position des objets, les conditions de l'eau et les réglages des capteurs, et voir immédiatement la réaction du robot. Cette couche AR/VR n'est pas qu'un gadget visuel ; elle fusionne les flux bruts des capteurs en une image 3D unifiée, plus facile à interpréter et exploiter par un système d'IA.
Apprendre au robot par l'expérience
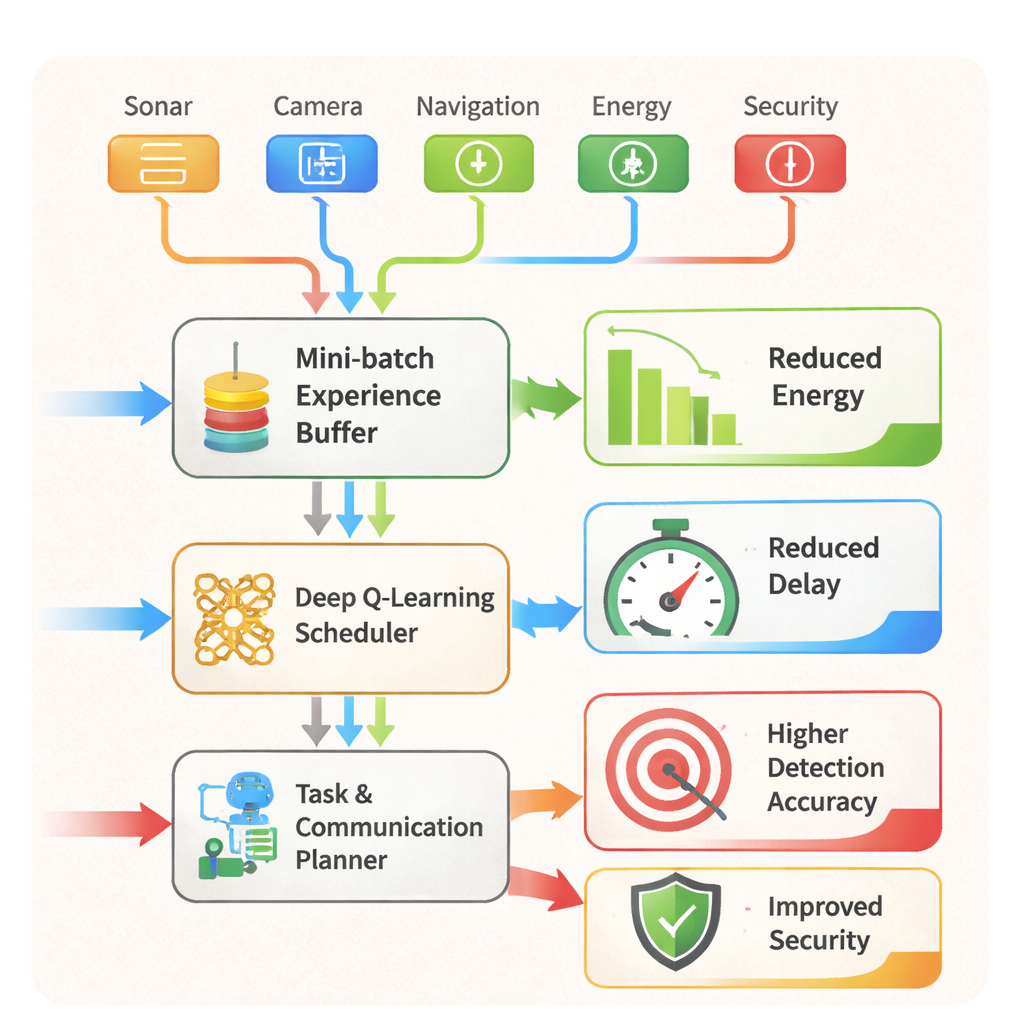
Au cœur du cadre se trouve une stratégie d'IA que les auteurs appellent Adaptive Augmented Reality and Reinforcement Learning Scheduling Strategy (AARLSS). Plutôt que de suivre un script fixe, le robot apprend par essais et erreurs dans l'océan virtuel. À chaque instant, il observe son état de capteurs fusionnés, choisit une action (par exemple modifier sa trajectoire, ajuster la fréquence d'échantillonnage des capteurs ou basculer entre communications courte et longue portée) et reçoit une récompense. Cette récompense équilibre quatre objectifs : économiser l'énergie, réduire le délai, diminuer le risque de sécurité et limiter l'utilisation des ressources de calcul et réseau. Un réseau profond de Q‑learning stocke et met à jour la valeur attendue des différentes décisions, en utilisant des mini-lots d'expériences passées conservées dans une mémoire de rejouage pour que le robot apprenne à la fois des situations récentes et anciennes.
De la planification intelligente à des missions plus sûres Figure 2.
AARLSS joue aussi le rôle d'ordonnanceur en temps réel. Il décide quelles tâches — navigation, détection d'objets, communication ou contrôles de sécurité — doivent s'exécuter où et quand, et si les données doivent être traitées à bord du robot, déchargées vers un serveur en périphérie (edge) ou retardées. Par-dessus cela, un système intégré de détection d'intrusion analyse en continu les motifs dans les données des capteurs et du réseau pour signaler les anomalies susceptibles d'indiquer une attaque ou une panne, et peut déclencher des actions de protection comme bloquer des liaisons risquées ou forcer un calcul local uniquement. Dans des tests réalisés dans le simulateur AR/VR, le cadre a surpassé plusieurs méthodes d'apprentissage par renforcement établies. Il a réduit la consommation d'énergie du véhicule sous-marin d'environ 20 %, diminué les délais de communication et d'exécution des tâches d'environ 18–20 % et porté la précision de détection d'objets à environ 97–98 %, même lors de manœuvres complexes et dans des scènes encombrées.
Ce que cela signifie pour les océans réels
Pour un public non spécialiste, le message clé est que cette recherche ouvre la voie à des robots sous-marins plus autonomes, efficaces et fiables. En s'entraînant dans un océan virtuel riche et en apprenant à jongler simultanément avec l'énergie, le temps, la précision et la sécurité, AARLSS permet au véhicule de choisir quand parler, quand écouter et quand se taire pour économiser de l'énergie — tout en restant vigilant sur son environnement et en protégeant ses données. Bien que ces résultats proviennent d'un simulateur sophistiqué plutôt que de la mer ouverte, ils suggèrent que de futures flottes de robots sous-marins pourraient mener des missions plus longues, plus sûres et plus riches en données avec moins de supervision humaine, améliorant ainsi la science marine et les inspections industrielles en mer.
Citation: Lakhan, A., Mohammed, M.A., Ghani, M.K.A. et al. A novel augmented reality and reinforcement learning empowered communication framework for underwater unmanned autonomous vehicle.
Sci Rep16, 6241 (2026). https://doi.org/10.1038/s41598-026-36647-3
Mots-clés: robotique sous-marine, véhicules sous-marins autonomes, apprentissage par renforcement, réalité augmentée, communication sous-marine