Clear Sky Science · fr
Contrôle prédictif par modèle piloté par apprentissage par renforcement pour l’optimisation d’un moteur synchrone à aimants permanents à rotation contrarotative dans un système de propulsion de sous-marin
Des moteurs plus intelligents pour des sous-marins plus discrets
Les sous-marins modernes reposent sur une propulsion silencieuse et efficace pour explorer les océans et mener des missions scientifiques, commerciales ou de défense. Cette étude examine un type particulier de moteur électrique qui entraîne deux hélices en sens inverse, aidant le sous-marin à se déplacer de façon fluide et silencieuse dans l’eau. Les chercheurs montrent comment combiner des outils de prédiction avancés avec un algorithme d’apprentissage permet de maintenir ces moteurs stables et efficaces, même lorsque les vagues, les courants et les manœuvres brusques les perturbent.
Deux hélices, un sous-marin stable
Les systèmes à hélice unique traditionnels peuvent provoquer des torsions et des roulis du sous-marin, surtout à grande vitesse, ce qui complique la manœuvrabilité et facilite la détection. Pour éviter cela, les ingénieurs utilisent des systèmes à hélices contrarotatives : deux hélices montées sur le même arbre mais tournant en sens inverse. Au cœur de cette configuration se trouve le moteur synchrone à aimants permanents contrarotatif (CRPMSM), qui est essentiellement deux moteurs électriques compacts à couple élevé empilés l’un sur l’autre. Cette disposition annule les forces de torsion indésirables, améliore l’utilisation de l’énergie et réduit le bruit, autant d’atouts cruciaux pour la discrétion et les longues missions sous la surface. Cependant, lorsque la charge sur les deux rotors devient déséquilibrée, comme en eau turbulente ou lors de virages serrés, maintenir une parfaite harmonie de rotation devient un défi de contrôle sérieux. 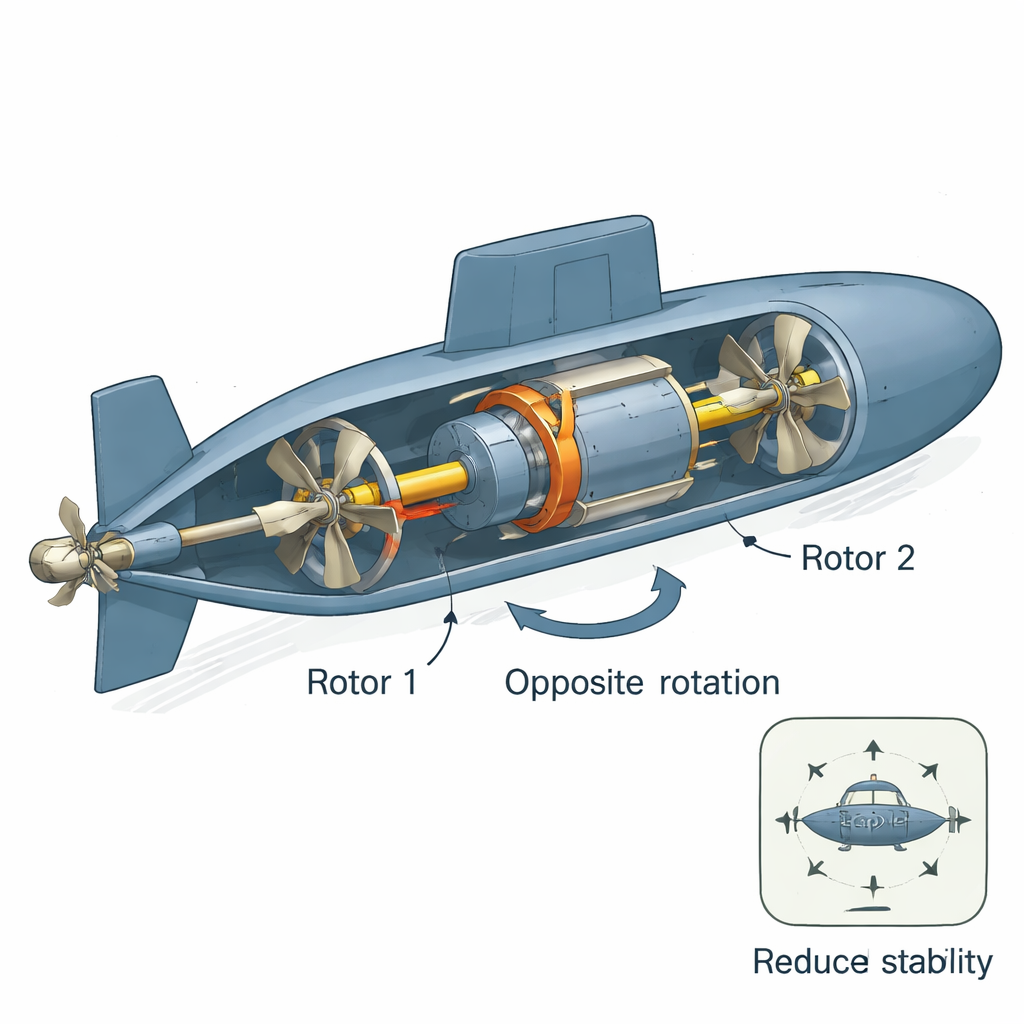
Pourquoi le contrôle conventionnel montre ses limites
Les ingénieurs ont testé de nombreuses stratégies de commande pour garder les rotors du CRPMSM synchronisés et efficaces. Des méthodes comme le contrôle orienté champ et le contrôle direct du couple peuvent bien fonctionner dans des conditions calmes et prévisibles, mais elles peinent lorsque l’environnement sous-marin évolue rapidement ou devient fortement hétérogène. Des techniques plus sophistiquées telles que le contrôle à mode glissant, flou et adaptatif améliorent la robustesse, mais elles reposent souvent sur des modèles mathématiques très précis du moteur et du milieu environnant. Dans la pratique, ces modèles ne sont jamais parfaits, et les écarts peuvent entraîner une augmentation des ondulations de couple, un rétablissement plus lent après perturbation et une perte d’énergie. Le contrôle prédictif par modèle (MPC), qui planifie des actions optimales sur une courte fenêtre future, offre une réponse rapide mais reste étroitement dépendant de la qualité du modèle sous-jacent.
Un contrôleur hybride qui apprend en conditions réelles
Les auteurs proposent un cadre hybride Reinforcement Learning-driven Model Predictive Control (RL-MPC) qui combine les forces des deux approches. Le MPC utilise un modèle mathématique du CRPMSM pour prédire l’évolution des courants, du couple et de la vitesse sur les prochains instants de commande et choisit des consignes de tension devant suivre les objectifs de vitesse et de courant tout en respectant les limites. Par-dessus cela, un agent d’apprentissage par renforcement basé sur l’algorithme Twin Delayed Deep Deterministic Policy Gradient (TD3) observe le comportement réel du moteur. En recevant des récompenses lorsque les erreurs de vitesse, les erreurs de courant et l’effort de commande sont faibles, l’agent ajuste progressivement les sorties du MPC pour compenser les erreurs de modélisation, les charges déséquilibrées et les perturbations externes. Une étape de modulation de largeur d’impulsion vecteur d’espace (SVPWM) convertit ensuite ces consignes de tension optimisées en signaux de commutation pour l’onduleur qui pilote le moteur.
Mise à l’épreuve du moteur intelligent
Pour évaluer leur approche, les chercheurs ont construit une simulation détaillée d’un système de moteur contrarotatif de 120 kW dans MATLAB/Simulink et l’ont testée sous trois scénarios de fonctionnement réalistes. Dans le premier, le moteur tournait à vitesse constante tandis que la charge sur les deux rotors variait mais restait équilibrée ; dans le second, la vitesse variait sous charge constante ; dans le troisième, le cas le plus exigeant, les rotors subissaient des charges différentes alors que la consigne de vitesse était fixe. Dans chaque cas, le RL-MPC a été comparé directement au MPC conventionnel en utilisant les mêmes horizons de prédiction et de commande. 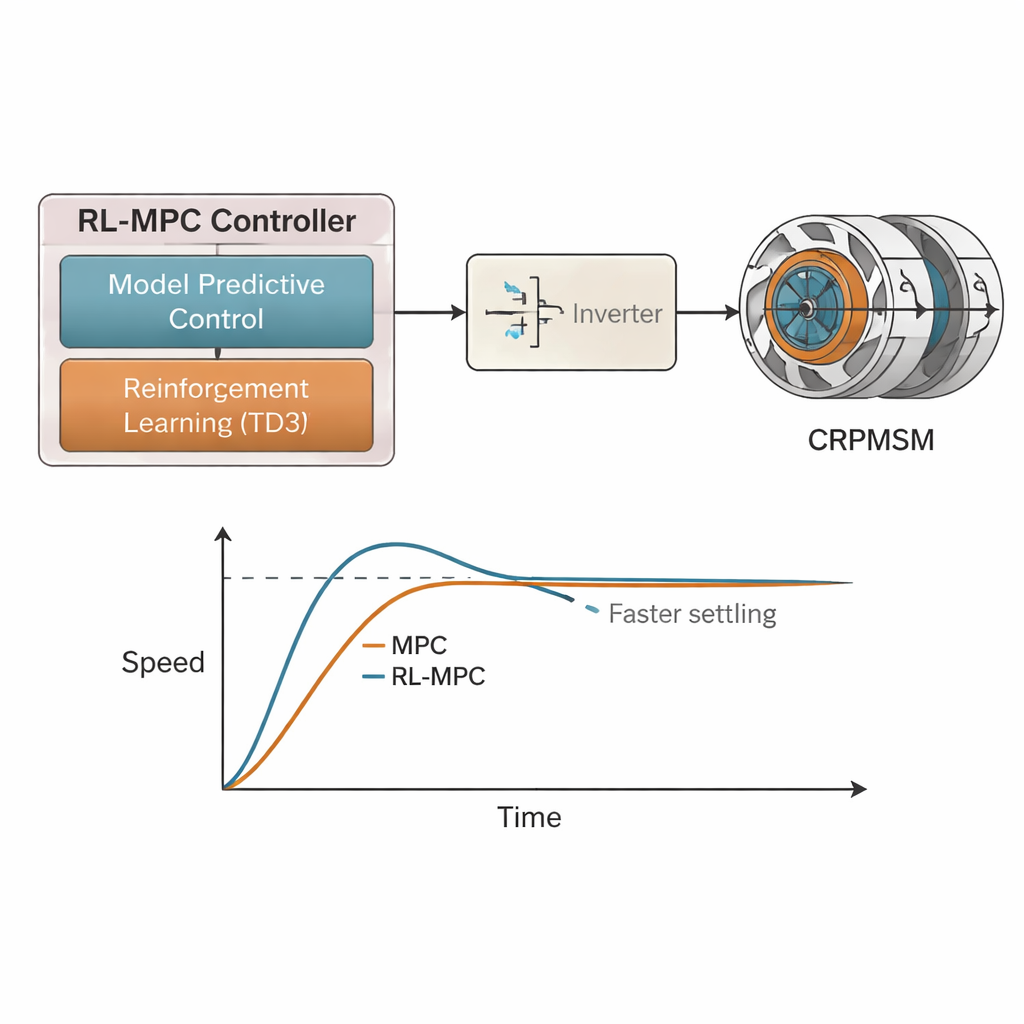
Réponse plus rapide, courants plus propres, meilleure synchronisation
Le contrôleur hybride RL-MPC a systématiquement surpassé le MPC standard dans tous les tests. Lors de changements brusques de charge ou de vitesse, le RL-MPC a réduit le dépassement de vitesse d’environ 30 % à environ 15–16,6 % et a divisé par deux le temps de stabilisation, passant d’environ 1,4 seconde à 0,7 seconde. Les ondulations de couple ont été réduites, et les deux rotors contrarotatifs sont restés étroitement synchronisés, même lorsque l’un était plus fortement chargé que l’autre. Autre point important, la qualité des courants statoriques s’est nettement améliorée : la distorsion harmonique totale a diminué de plus de 60 % pendant les transitoires de charge déséquilibrée sévères, passant de 9,3 % pour le MPC à 3,4 % pour le RL-MPC, et atteignant environ 2–3 % à l’état stable. Des courants plus propres signifient moins de chauffage, un fonctionnement plus silencieux et une efficacité globale plus élevée.
Ce que cela signifie pour les véhicules sous-marins du futur
Pour un lecteur non spécialiste, le message principal est que l’ajout d’une couche d’apprentissage au-dessus d’un contrôleur prédictif rend les moteurs de sous-marins à la fois plus intelligents et plus résistants. Plutôt que de s’appuyer uniquement sur des équations fixes qui peuvent échouer lorsque la mer devient agitée ou que le véhicule manœuvre brusquement, le cadre RL-MPC peut s’adapter en temps réel, maintenant le moteur à double rotor synchronisé, réactif et efficace. Bien que les résultats présentés soient issus de simulations et devront être validés sur du matériel réel et en milieu océanique, ce travail ouvre la voie à des véhicules sous-marins qui parcourent de plus grandes distances avec la même énergie, font moins de bruit et restent stables et maniables dans des conditions difficiles.
Citation: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
Mots-clés: propulsion de sous-marin, moteur contrarotatif, contrôle par apprentissage par renforcement, contrôle prédictif par modèle, véhicules sous-marins