Clear Sky Science · fr
Un algorithme conjoint d’estimation portée–angle–vitesse pour radar FDA‑MIMO basé sur le traitement du signal sur graphe
Un radar plus intelligent pour un monde encombré et bruyant
Des voitures autonomes à la surveillance aérienne, la société moderne dépend largement de systèmes radar capables de localiser et de suivre des objets rapidement et de manière fiable. À mesure que les cieux, les routes et les ondes deviennent plus encombrés, le radar doit distinguer plusieurs cibles en mouvement en présence d’interférences et de bruit importants. Cet article présente une nouvelle façon d’améliorer une classe puissante de radars — appelés radars FDA‑MIMO — pour qu’ils voient plus clairement en trois dimensions (distance, direction et vitesse) en empruntant des outils issus d’un domaine émergent : le traitement du signal sur graphe.
Pourquoi cette nouvelle architecture radar est importante
Les radars classiques à réseau phasé orientent principalement leur faisceau selon l’angle, un peu comme on balaie une lampe de gauche à droite. Les radars à réseau à fréquence variable (Frequency Diverse Array, FDA) fonctionnent différemment : chaque élément d’antenne émet à une fréquence légèrement différente. Cette petite variation rend le diagramme de rayonnement dépendant non seulement de l’angle, mais aussi de la distance et du temps. Combinaisonnée aux techniques multi‑émetteurs multi‑récepteurs (MIMO), une architecture FDA‑MIMO peut en principe déterminer la position d’une cible en trois dimensions : sa distance, son angle et sa vitesse. Le défi consiste à extraire rapidement et précisément toutes ces informations à partir des échos bruts, surtout lorsqu’il y a de nombreuses cibles et que les signaux sont noyés dans le bruit.
Transformer les échos radar en problème de réseau
Les auteurs relèvent ce défi en réimaginant les mesures radar comme des signaux vivant sur un graphe — un réseau de nœuds et d’arêtes. Chaque nœud de ce graphe représente une paire émetteur‑récepteur particulière dans l’ensemble FDA‑MIMO, et les arêtes captent la façon dont les signaux aux nœuds voisins sont liés dans l’espace. En définissant soigneusement ces connexions, ils construisent une « matrice d’adjacence » qui décrit comment les échos devraient se propager à travers l’ensemble si une cible se trouve à une distance et un angle donnés. Lorsque la paire distance–angle supposée correspond à la cible réelle, le motif d’écho mesuré s’aligne presque parfaitement avec l’un des modes propres de vibration du graphe. En pratique, cela signifie qu’après une version graph‑basée de la transformée de Fourier, l’énergie se concentre en un pic très net sur une seule composante spectrale. L’algorithme recherche de tels pics sur une grille de valeurs de distance et d’angle pour localiser les cibles. 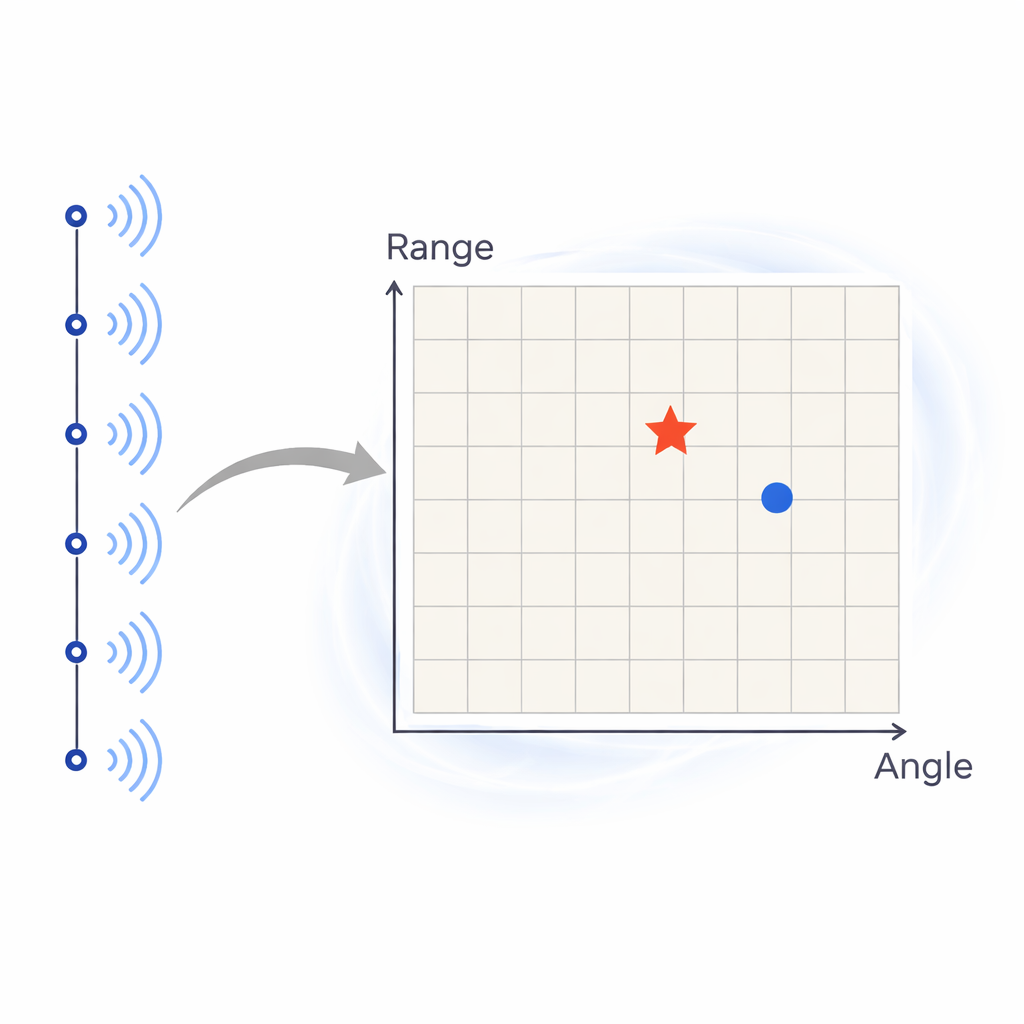
Ajouter le mouvement : mesurer la vitesse avec la même idée
Pour estimer la vitesse d’une cible, la méthode étend le concept de graphe à la dimension temporelle, sur plusieurs impulsions radar. Désormais, chaque nœud représente une impulsion dans le temps, et les arêtes relient les impulsions voisines en boucle pour rendre compte de l’évolution du signal si la cible possède une certaine vitesse radiale. Là encore, lorsque la vitesse supposée coïncide avec la vitesse réelle, le signal transformé montre un pic concentré dans le domaine spectral du graphe. L’algorithme balaye des vitesses candidates à la recherche de l’endroit où ce pic est le plus marqué. De façon cruciale, les auteurs conçoivent leur cadre pour que les estimations distance–angle issues du graphe spatial et les estimations de vitesse issues du graphe temporel se renforcent mutuellement. Les données de toutes les antennes et de toutes les impulsions sont combinées, formant une structure multidimensionnelle qui améliore la précision sans duplication de calcul. 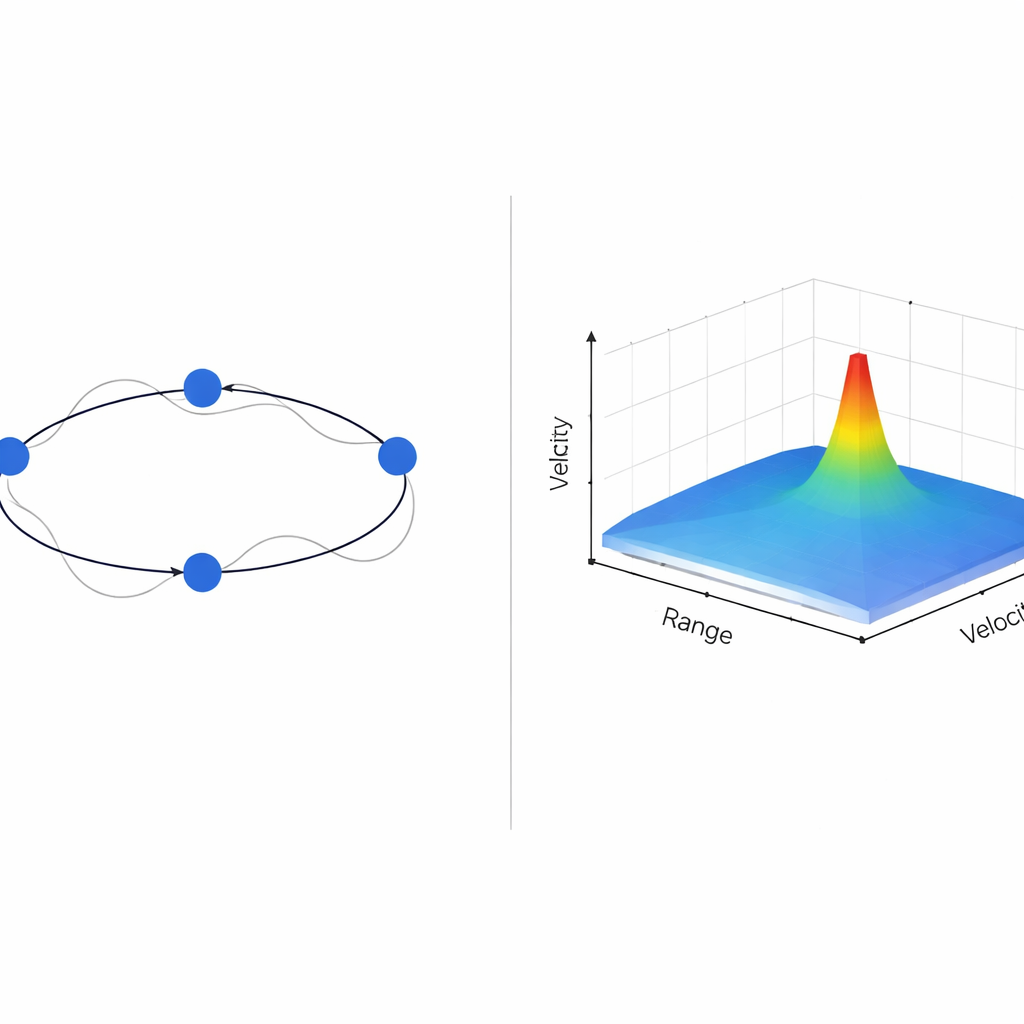
Mettre la méthode à l’épreuve
Au moyen d’une série de simulations, les chercheurs comparent leur approche basée sur les graphes à une technique de haute précision largement utilisée, connue sous le nom de MUSIC. Ils testent des scénarios avec une ou plusieurs cibles, examinent la capacité de chaque méthode à séparer des objets proches, et évaluent les performances lorsque les signaux sont très faibles par rapport au bruit. L’algorithme basé sur les graphes atteint une charge computationnelle globale comparable à celle des méthodes classiques, mais offre une résolution plus fine en distance, en angle et en vitesse. Il est particulièrement efficace pour supprimer les faux pics causés par le bruit, conduisant à des cartes de cibles plus nettes et plus fiables. Même lorsque le rapport signal sur bruit est faible — des conditions où de nombreuses méthodes traditionnelles peinent — le nouvel algorithme conserve des bornes d’erreur étroites sur la position des cibles et leur vitesse.
Quelles implications pour le radar réel
Concrètement, ce travail montre qu’en traitant les données radar comme des signaux vivant sur un réseau, on peut appliquer un traitement plus intelligent qui sépare plus clairement les vraies cibles du désordre. Pour des applications allant de la défense et du contrôle du trafic aérien à la sécurité automobile et à la surveillance environnementale, la technique proposée promet un suivi plus précis de multiples objets en mouvement dans des conditions difficiles, sans exiger des ressources de calcul irréalistes. En mariant une conception d’antenne avancée et des mathématiques basées sur les graphes, les auteurs démontrent une voie pratique vers des radars qui voient plus loin, plus précisément et de façon plus fiable dans un environnement électromagnétique de plus en plus complexe.
Citation: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
Mots-clés: détection radar, suivi de cible, traitement du signal, traitement du signal sur graphe, FDA‑MIMO