Clear Sky Science · fr
Algorithme A* conscient de la direction et auto-adaptatif avec heuristique PPO pour la planification de trajectoire des UAV en ville intelligente
Des itinéraires plus intelligents pour les drones urbains
Imaginez des flottes de petits drones de livraison se faufilant entre les gratte‑ciel, apportant des médicaments, des colis ou des fournitures d’urgence à travers une ville animée. Pour voler en toute sécurité et rapidement, chaque drone doit décider en permanence de la direction à prendre. Cet article présente une nouvelle méthode permettant aux drones de trouver de meilleurs itinéraires dans des espaces urbains tridimensionnels encombrés, rendant leurs trajectoires plus courtes, plus fluides et plus fiables que les méthodes traditionnelles.

Pourquoi trouver un bon chemin est si difficile
Pour un drone, choisir un chemin ne se résume pas à tracer une ligne droite entre le point A et le point B. Il doit éviter les bâtiments, les arbres et les zones interdites tout en respectant des contraintes de virage et d’altitude. Les méthodes classiques de planification de trajectoire, comme le bien connu algorithme A*, fonctionnent bien sur des cartes simples mais peinent dans des environnements urbains 3D réalistes. Elles examinent souvent trop de pas possibles, gaspillent des ressources de calcul et peuvent produire des trajectoires en zigzag plus longues que nécessaire, voire échouer lorsque l’environnement est très encombré. À mesure que les villes intelligentes se complexifient, ces faiblesses deviennent un goulot d’étranglement sérieux pour un trafic aérien sûr et efficace.
Une amélioration directionnelle d’un outil classique
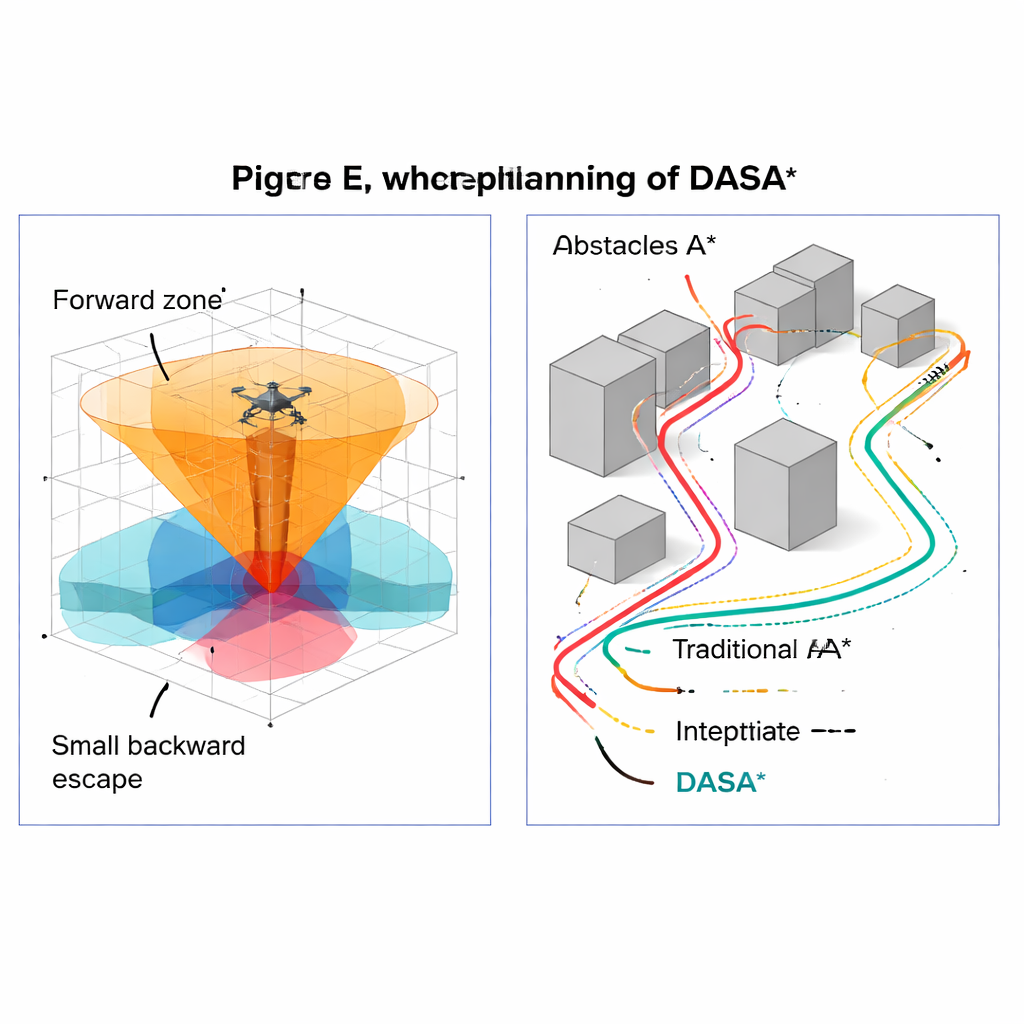
Les auteurs s’appuient sur l’algorithme A* et proposent une version améliorée appelée DASA* (Direction‑Aware and Self‑Adaptive A*). Plutôt que de regarder aveuglément dans toutes les directions autour du drone, DASA* prend en compte l’emplacement de l’objectif. Il classe les positions candidates voisines en trois couches : celles principalement vers l’avant du drone en direction de la cible, celles sur les côtés, et un petit ensemble derrière lui pouvant aider à sortir d’impasses. Un détecteur de blocage simple surveille les signes indiquant que la recherche est en train de « s’engluer » et élargit alors automatiquement la recherche, d’un cône avant étroit vers un voisinage plus complet lorsque c’est nécessaire. Cette expansion ciblée et alignée sur l’objectif réduit les explorations inutiles tout en garantissant qu’un itinéraire valide sera trouvé si celui‑ci existe.
S’adapter aux espaces denses et ouverts
Une autre caractéristique clé de DASA* est sa capacité à changer d’allure selon l’environnement. Lorsque le drone est loin des obstacles, l’algorithme effectue des pas plus grands, couvrant rapidement l’espace libre. À l’approche des bâtiments ou d’autres dangers, il passe à des pas plus petits, permettant des manœuvres précises dans des passages étroits. Ce « niveau de zoom » variable permet au planificateur d’aller vite là où c’est sûr et de ralentir uniquement là où la précision compte. Une fois un chemin brut trouvé, une étape d’ajustement dédiée supprime les points de passage inutiles et ajuste une courbe lisse à travers les points clés restants. Le résultat est une trajectoire qui non seulement évite les collisions, mais ressemble aussi davantage à un trajet de vol naturel qu’un pilote expérimenté choisirait, avec moins de virages brusques.
Apprendre à l’algorithme à anticiper
L’A* traditionnel s’appuie sur des formules de distance simples pour estimer à quel point chaque position est éloignée de l’objectif. DASA* remplace cette estimation par un guide appris basé sur Proximal Policy Optimization (PPO), une technique moderne d’apprentissage par renforcement. Dans un environnement d’entraînement, un agent virtuel s’exerce à se déplacer vers une cible en 3D tout en percevant des distances, des différences de hauteur et des informations de direction. Un réseau de neurones apprend progressivement l’intérêt de chaque situation et, après entraînement, sert de « module d’intuition » plug‑in pour DASA*. Cette heuristique apprise oriente la recherche plus directement vers de bonnes solutions, en particulier dans des configurations complexes où la distance euclidienne simple est trompeuse.
Quelle efficacité dans des villes virtuelles
Les chercheurs ont testé DASA* dans plusieurs scénarios urbains 3D simulés peuplés de bâtiments en forme de boîtes et d’obstacles cylindriques mimant des structures urbaines réelles. Ils l’ont comparé à l’A* classique et à plusieurs alternatives populaires, y compris des versions améliorées d’arbres à exploration rapide, des essaims de particules, l’évolution différentielle et une autre variante d’A* appelée Theta*. Dans de nombreux cas de test, DASA* a systématiquement trouvé des chemins plus courts, développé beaucoup moins de points candidats et tourné beaucoup plus vite — souvent 10 à 50 fois plus rapidement que l’A* standard. Il a également maintenu un taux de réussite parfait ou quasi parfait même dans des environnements denses et labyrinthiques, alors que certaines méthodes concurrentes échouaient plus souvent ou produisaient de longs détours en boucle.
Ce que cela signifie pour la vie quotidienne
Concrètement, DASA* donne aux robots volants un meilleur sens de l’orientation et du jugement. En se concentrant sur les directions prometteuses, en adaptant son niveau de détail à l’environnement local, en utilisant une perception apprise de la proximité du succès et en polissant la trajectoire finale, il transforme des données cartographiques brutes en plans de vol efficaces, fluides et pratiques. S’il est adopté dans des systèmes réels, un tel approche pourrait aider les villes intelligentes de demain à gérer les livraisons par drone, les inspections et les interventions d’urgence de manière plus sûre et plus fiable, même si le ciel se densifie et que les environnements se complexifient.
Citation: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
Mots-clés: planification de trajectoire UAV, drones pour villes intelligentes, algorithme A*, navigation autonome, planification de mouvement robotique