Clear Sky Science · fr
Navigation autonome en extérieur non structuré utilisant l’apprentissage par renforcement guidé par segmentation sémantique
Des robots qui apprennent à randonner en forêt
Imaginez un petit robot capable de parcourir seul un sentier forestier, se faufilant entre arbres et rochers sans GPS ni opérateur au joystick. Cet article décrit un système qui apprend à ces robots à « voir » les chemins dans des bois denses et à décider, à chaque instant, comment avancer en toute sécurité. Ce travail est pertinent pour des robots futurs qui pourraient aider à la surveillance des forêts, à la prévention des incendies, aux opérations de recherche et sauvetage, et même à la livraison en plein air dans des zones où les signaux satellites sont faibles ou inexistants.
Pourquoi les forêts sont si difficiles pour les robots
Les forêts font partie des environnements les plus exigeants pour les machines autonomes. Les sentiers peuvent être étroits et sinueux, le terrain est irrégulier, branches et buissons obstruent souvent la vue, et les grands arbres rendent le GPS peu fiable. Les méthodes de navigation traditionnelles reposent sur des cartes précises, un GPS puissant ou des capteurs laser coûteux, et partent souvent du principe d’espaces structurés et dégagés comme les rues ou les ateliers. Dans les bois, ces hypothèses s’effondrent : ombres, saisons changeantes et végétation dense perturbent les systèmes de vision simples, tandis que les contrôleurs basés sur des règles peinent à gérer toutes les situations désordonnées et imprévues qui surgissent sur un vrai sentier.
Trois cerveaux qui travaillent ensemble
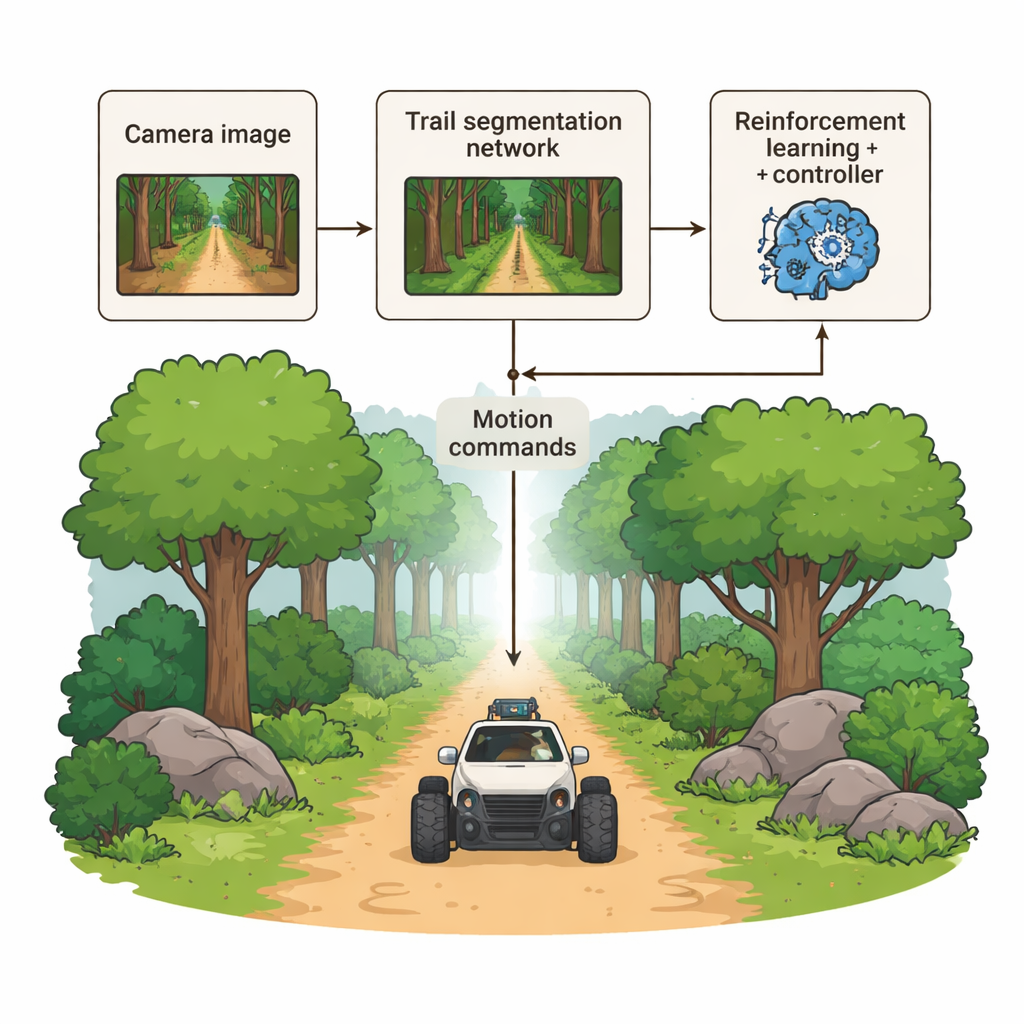
Les auteurs proposent un système de navigation hybride qui dote le robot de trois « cerveaux » complémentaires. D’abord, un module de vision profond analyse chaque image caméra et identifie, presque pixel par pixel, quelles zones appartiennent au sentier praticable. Ensuite, un module de décision basé sur l’apprentissage utilise l’apprentissage par renforcement pour choisir des commandes de direction et de vitesse fluides, récompensant le comportement qui reste sur le sentier, évite les collisions et atteint l’objectif efficacement. Enfin, un contrôleur classique convertit la forme du sentier prédite en mouvements de roues stables, lissant les gestes brusques et maintenant une trajectoire élégante plutôt que saccadée. Plutôt qu’un réseau opaque de bout en bout, ces modules sont séparés mais étroitement liés, ce qui permet aux ingénieurs de comprendre et déboguer chaque étape.
Apprendre à la vision à reconnaître les sentiers
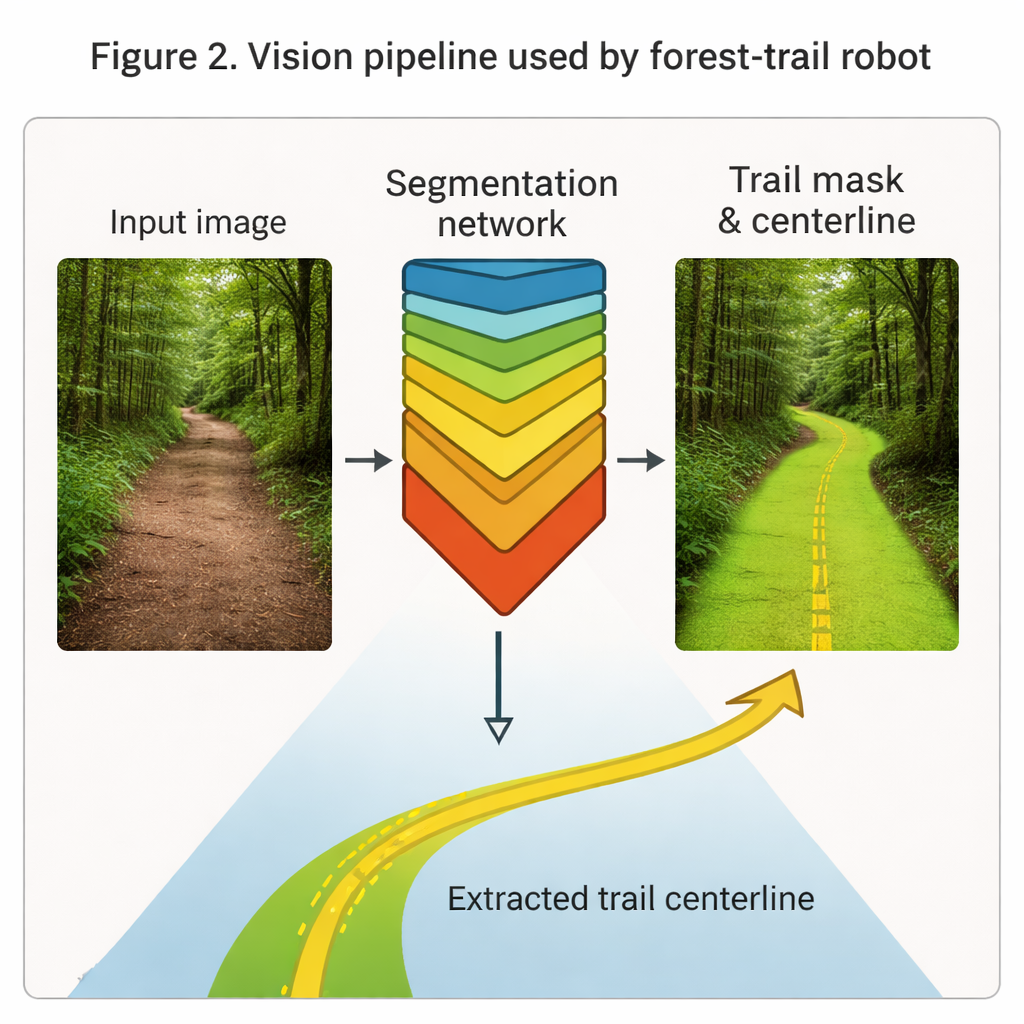
Au cœur des « yeux » du robot se trouve un réseau profond connu sous le nom de Mask R-CNN, ici adapté pour mettre en évidence les sentiers forestiers dans des images couleur ordinaires. Entraîné sur près de 24 000 images annotées extraites de vidéos de randonnée prises à hauteur humaine dans des conditions de lumière, météo et types de sentiers variés, le système apprend à peindre la région du sentier dans chaque image sous forme d’un masque propre. À partir de ce masque, il extrait une courbe de ligne centrale fine qui capture la direction et la courbure du chemin à venir. Lors des tests, le module vision obtient un fort recouvrement avec les annotations humaines et une précision pixel supérieure à 90 %, délimitant de façon robuste les sentiers même lorsque branches ou ombres les dissimulent partiellement. Ces indices géométriques alimentent directement les modules d’apprentissage et de contrôle en tant que description compacte de « où se trouve le chemin ».
Former un robot à prendre de bonnes décisions
La deuxième composante clé est le module de décision, qui utilise une technique appelée apprentissage par renforcement. Au lieu qu’on lui indique exactement quoi faire, le robot essaie des actions dans une forêt simulée réaliste et reçoit des récompenses pour les bons résultats et des pénalités pour les mauvais. Avancer le long du sentier est bon ; s’en écarter, heurter des obstacles ou rester bloqué est mauvais. Sur environ 150 000 étapes d’entraînement, le système découvre progressivement des stratégies qui le maintiennent centré sur le sentier, négocient les courbes avec grâce et réagissent de manière sensée lorsque des branches ou des rochers apparaissent sur sa route. Pour garder des mouvements lisses et sûrs, les actions apprises peuvent être combinées avec celles du contrôleur classique, ce qui est particulièrement utile dans les virages serrés ou en conditions bruitées.
Mettre le système à l’épreuve
Pour évaluer l’efficacité de cette combinaison, les chercheurs ont construit trois forêts virtuelles détaillées : l’une avec des sentiers étroits et encombrés, une autre avec un terrain pentu et inégal et de grands obstacles, et une troisième remplie de bifurcations, d’impasses et de sentiers trompeurs. Sur 90 essais dans ces cartes, le robot a atteint son objectif sans collision dans environ 87 % des épisodes, avec en moyenne seulement 0,2 chocs par parcours et en restant typiquement à environ 30 centimètres du centre du sentier. Il a aussi terminé les trajets rapidement et de manière cohérente. Lorsque les auteurs ont retiré ou simplifié un module à la fois, les performances ont chuté fortement — montrant que les trois composantes sont nécessaires. Comparé à d’autres systèmes récents, y compris ceux utilisant des scanners laser, cette approche hybride uniquement basée sur la vision offre le meilleur compromis global entre taux de réussite, précision et sécurité.
Ce que cela signifie pour les robots en conditions réelles
Pour un non-spécialiste, la conclusion est que les robots deviennent meilleurs pour randonner comme des usagers prudents et compétents des sentiers. En combinant une forte perception du contexte visuel (« ceci est le chemin »), une prise de décision basée sur l’expérience (« ces mouvements ont bien fonctionné auparavant ») et un mécanisme de direction stable, le système proposé permet à un petit robot à roues de naviguer dans des forêts complexes sans cartes ni GPS. Bien que le travail ait été testé en simulation et fasse encore face à des défis comme des éclairages extrêmes et des types de sentiers rares, il fournit une feuille de route pratique pour des robots de terrain futurs capables de partager en sécurité des milieux sauvages avec des personnes, en nous aidant à inspecter les forêts, soutenir les équipes de secours et mieux gérer les ressources naturelles.
Citation: Tibermacine, A., Tibermacine, I.E., Akrour, D. et al. Autonomous navigation in unstructured outdoor environments using semantic segmentation guided reinforcement learning. Sci Rep 16, 2633 (2026). https://doi.org/10.1038/s41598-026-36022-2
Mots-clés: navigation autonome, robotique forestière, vision par ordinateur, apprentissage par renforcement, segmentation sémantique