Clear Sky Science · fr
Stratégie de commande sans capteur pour la position du rotor à pleine vitesse d’une PMSM basée sur un observateur à super-twisting amélioré et une optimisation de transition lisse
Garder les moteurs électriques intelligents sans matériel supplémentaire
Des voitures électriques aux actionneurs d’avions, de nombreuses machines modernes reposent sur un type de moteur électrique appelé moteur synchrone à aimants permanents (PMSM). Ces moteurs sont efficaces et puissants, mais ils nécessitent généralement des capteurs sensibles pour suivre leur vitesse de rotation et la position du rotor. Les capteurs augmentent le coût et peuvent tomber en panne dans des environnements difficiles. Cette étude examine comment piloter ces moteurs de manière fluide et précise sur toute la plage de vitesses sans utiliser aucun capteur mécanique.
Pourquoi se passer des capteurs est si difficile
Dans une chaîne d’entraînement PMSM classique, de petits capteurs de position sont montés sur l’arbre du moteur pour indiquer au système de commande où se trouve exactement le rotor. Cette information est cruciale pour injecter le courant dans les enroulements au bon moment, comme une poussée soigneusement synchronisée sur un manège en rotation. Cependant, les capteurs peuvent être fragiles, encombrants et coûteux. Les ingénieurs tentent depuis longtemps de les remplacer par des méthodes « sans capteur » qui déduisent la position du rotor à partir des signaux électriques du moteur. Le problème est qu’aucune méthode unique ne fonctionne bien à toutes les vitesses. À basse vitesse, les indices électriques usuels sont faibles, tandis qu’à haute vitesse, les astuces simples deviennent bruyantes et imprécises. Combler cet écart sans à-coups, vibrations ni perte de contrôle reste un défi persistant.
Deux façons astucieuses d’écouter le moteur
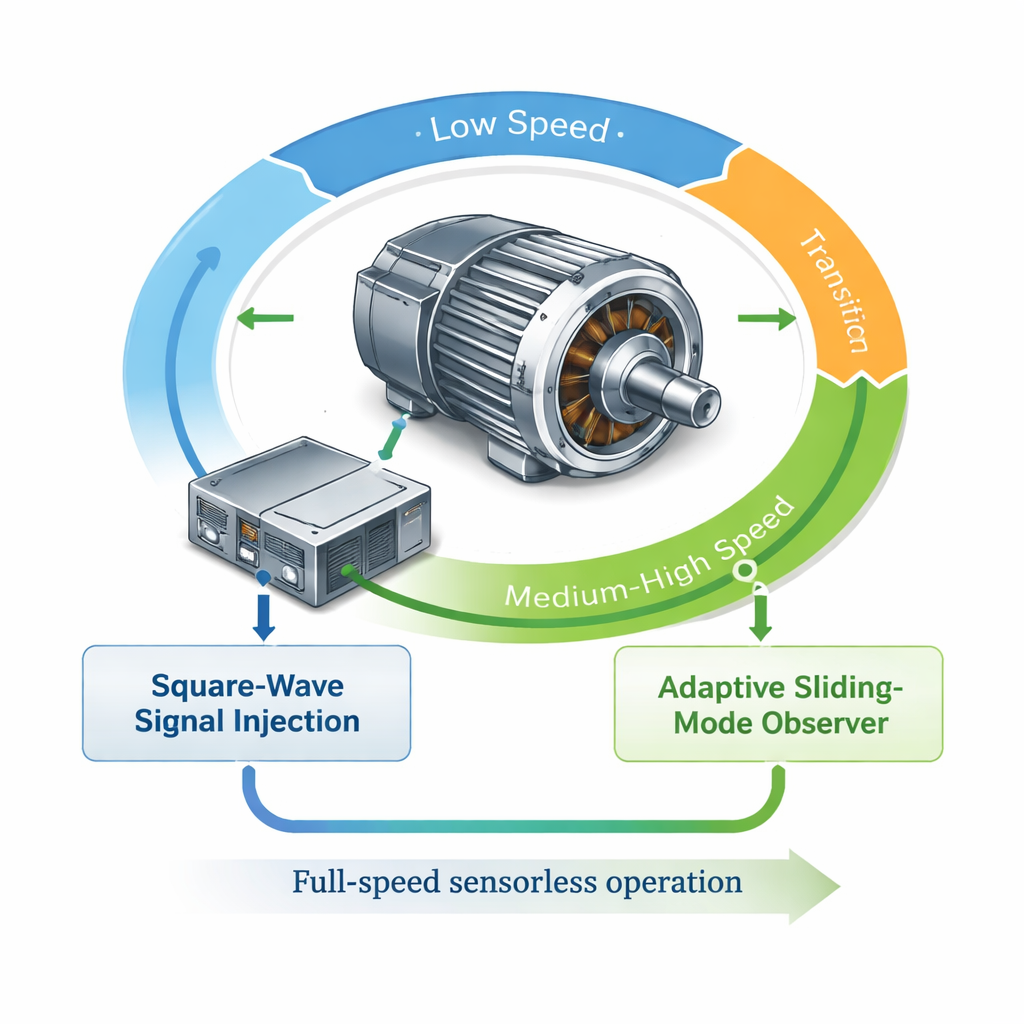
Pour couvrir toute la plage de vitesses, les auteurs combinent deux techniques sans capteur complémentaires. À basse vitesse, lorsque le retour électrique naturel du moteur est trop faible pour être mesuré de manière fiable, ils injectent délibérément un signal de tension carré à haute fréquence dans les enroulements. Le moteur réagit différemment selon l’angle du rotor, si bien qu’en analysant le courant haute fréquence résultant, le contrôleur peut déduire la position du rotor. Cette approche d’« injection haute fréquence » agit comme l’envoi d’un signal de sonde et la lecture de l’écho. Aux vitesses moyennes et élevées, le moteur produit un retour naturel plus marqué, connu sous le nom de force électromotrice de recul. Ici, l’équipe utilise un observateur mathématique avancé qui suit le comportement du moteur et estime la position et la vitesse du rotor à partir des tensions et courants mesurés.
Rendre l’observateur numérique plus intelligent et plus discret
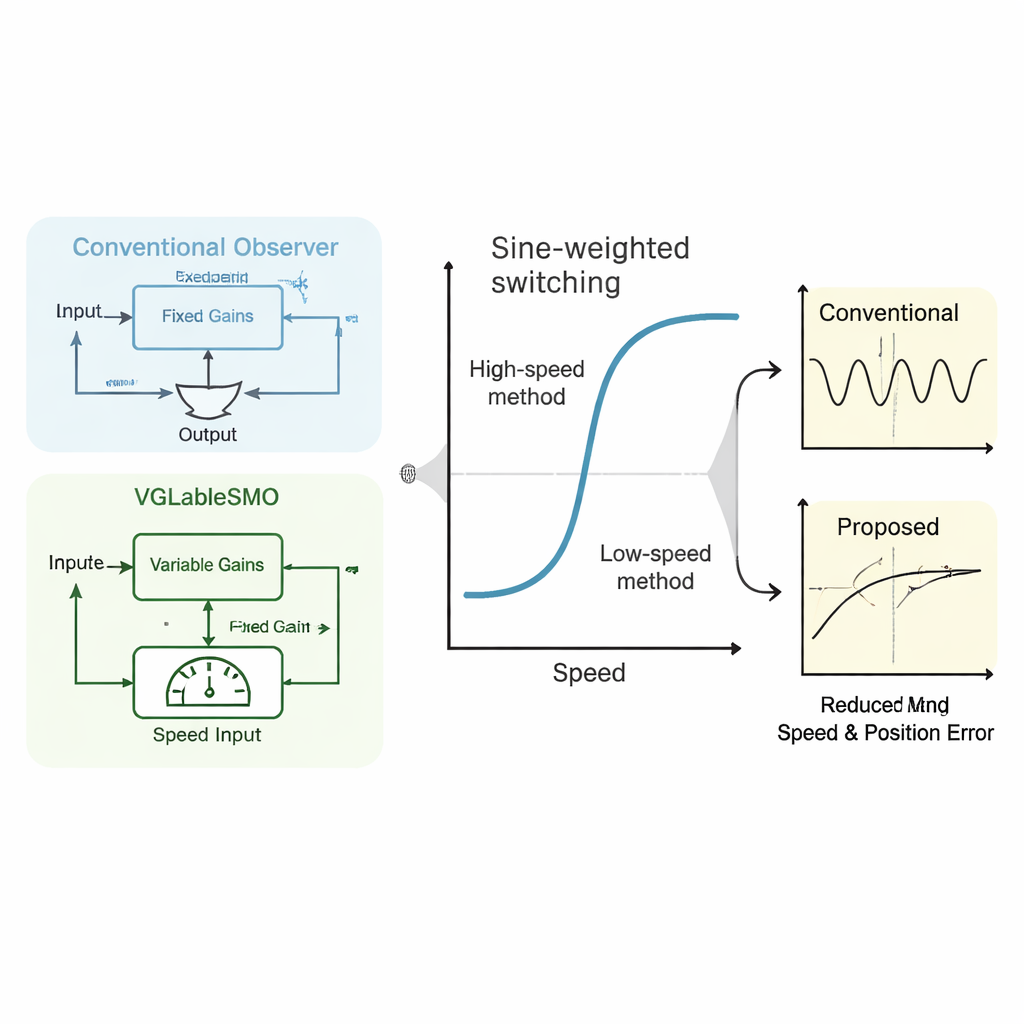
L’innovation centrale côté haute vitesse est un observateur amélioré nommé observateur en mode glissant linéaire à super-twisting à gain variable (VGLSTSMO). Les observateurs en mode glissant traditionnels sont appréciés pour leur robustesse face au bruit et aux perturbations, mais ils souffrent souvent du « chattering », de petites oscillations rapides qui peuvent se répercuter sur le couple et la vitesse. Ils reposent aussi sur des réglages internes fixes qui peuvent bien fonctionner dans une condition mais mal dans une autre. L’observateur proposé ajuste automatiquement ses gains internes en fonction de la vitesse du moteur et ajoute un terme correctif qui ramène en douceur les estimations vers les valeurs réelles. Un mécanisme adaptatif affine en outre l’estimation de la tension interne du moteur, améliorant la précision de la vitesse et de la position. Des simulations numériques montrent que cet observateur plus intelligent réduit l’erreur de position aux vitesses moyennes–élevées d’environ 0,9 radian à approximativement 0,2 radian et raccourcit le temps de stabilisation après une variation de charge.
Lisser la transition entre basse et haute vitesse
L’utilisation de deux méthodes d’estimation différentes soulève un autre problème : comment assurer un passage en douceur entre elles lors de l’accélération du moteur. Une approche simple consiste à atténuer l’une et à augmenter l’autre selon un poids linéaire, mais cela peut encore provoquer des à-coups de couple et de vitesse. Les auteurs proposent une fonction de pondération plus douce, en forme de sinus. Dans une bande de transition choisie, le système de commande transfère progressivement sa confiance de la méthode basse vitesse vers l’observateur haute vitesse en suivant une courbe ondulée lisse au lieu d’une rampe abrupte. Ce mélange affiné réduit sensiblement les sauts de vitesse et les défauts d’angle pendant le changement, diminuant l’erreur angulaire transitoire et divisant par deux le temps de stabilisation.
Ce que cela signifie pour les machines réelles
Dans l’ensemble, la stratégie combinée — sonder le moteur à basse vitesse, utiliser un observateur adaptatif aux vitesses supérieures et basculer entre les deux avec une pondération sinusoïdale lisse — offre un contrôle stable et précis sur toute la plage de vitesses sans capteurs mécaniques. Dans les simulations, la méthode proposée maintient les dépassements de vitesse et les erreurs en régime permanent faibles tout en évitant le chattering agressif qui peut provoquer bruit, usure et inconfort. Pour les applications courantes, cela signifie que les véhicules électriques, entraînements industriels et systèmes de propulsion pourraient devenir plus fiables, plus compacts et moins coûteux à produire, tout en conservant un contrôle de mouvement précis sans dépendre de capteurs d’arbre fragiles.
Citation: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Mots-clés: commande sans capteur de moteur, moteur synchrone à aimants permanents, observateur en mode glissant, injection de signal haute fréquence, systèmes d’entraînement électrique