Clear Sky Science · fr
Estimation de la charge cognitive en chirurgie assistée par robot à partir de caractéristiques temporelles et fréquentielles d’époques EEG par régression par forêt aléatoire
Pourquoi l’effort mental en chirurgie robotique compte
La chirurgie assistée par robot promet des incisions plus petites, une récupération plus rapide et des mains plus stables. Mais derrière le robot se trouve un chirurgien humain dont le cerveau peut être surchargé par des informations visuelles complexes, des commandes et des décisions à fort enjeu. Cette étude pose une question simple aux conséquences importantes : peut-on lire les signaux cérébraux d’un chirurgien en temps réel pour estimer son niveau de fatigue mentale, puis utiliser cette information pour maintenir sa vigilance et garantir la sécurité des patients ?
Écouter le cerveau pendant la chirurgie robotique
Plutôt que de s’appuyer sur des listes de contrôle ou l’intuition, les chercheurs ont utilisé l’électroencéphalographie, ou EEG, une technique qui mesure de faibles signaux électriques au niveau du cuir chevelu. Ils ont exploité un jeu de données public de 25 personnes réalisant des tâches de chirurgie assistée par robot en portant une coiffe de 128 électrodes. Ces capteurs captent des rythmes provenant de différentes zones du cerveau : l’avant (planification et prise de décision), les côtés (audition et mémoire), le sommet (toucher et conscience spatiale) et l’arrière (vision). L’objectif était de convertir ces ondulations brutes et bruitées en une estimation continue de la « charge cognitive » — l’intensité du travail cérébral à chaque instant.
Nettoyer et condenser les signaux cérébraux
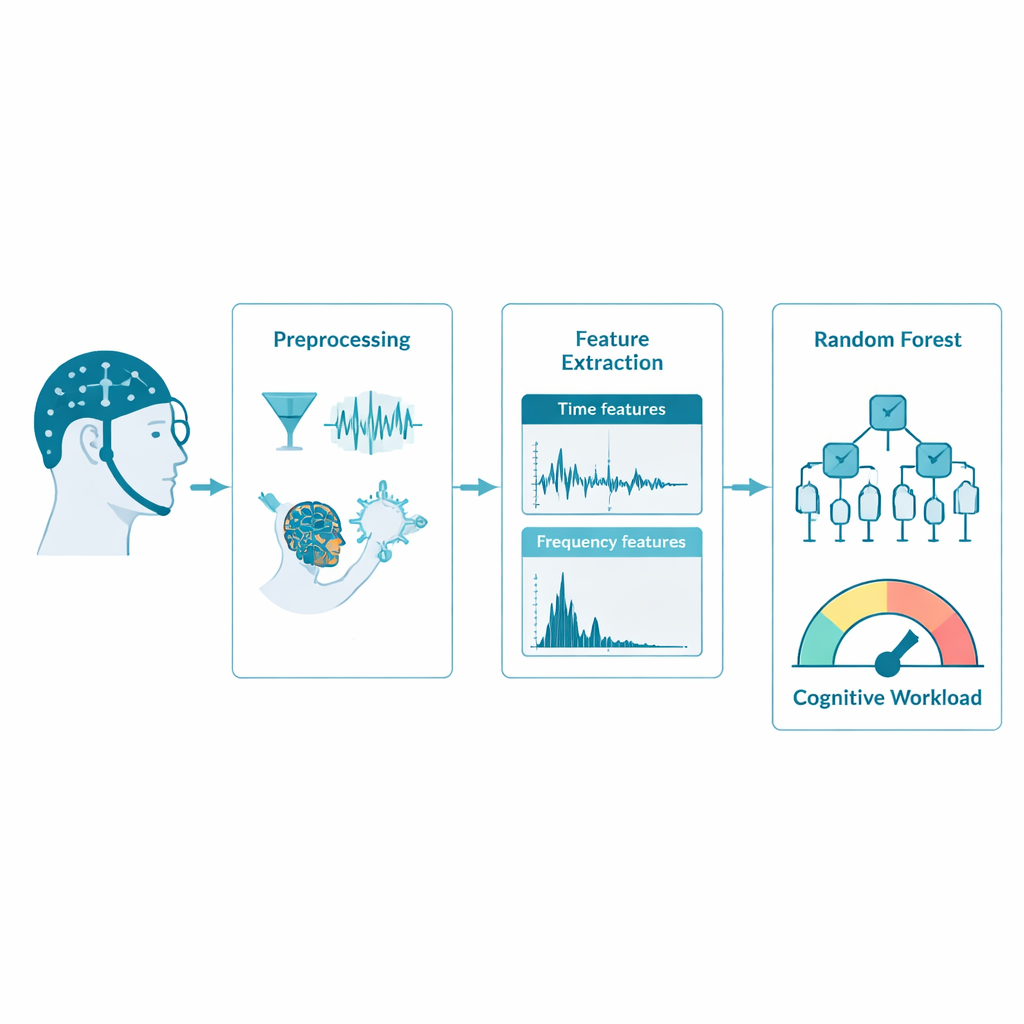
L’EEG brut ressemble davantage au réseau électrique d’une ville qu’à une lecture cérébrale claire : il est rempli d’interférences liées aux clignements, aux contractions musculaires et aux perturbations électriques. L’équipe a d’abord nettoyé les données en filtrant les fréquences indésirables et en utilisant une méthode mathématique appelée analyse en composantes indépendantes pour éliminer les artéfacts oculaires et musculaires. Pour rendre le système assez rapide pour une utilisation quasi temps réel, ils ont réduit la fréquence d’échantillonnage de 500 à 128 mesures par seconde. Des comparaisons soignées des cartographies et des spectrogrammes avant et après cette étape ont montré que les motifs clés étaient préservés, de sorte que les signaux restaient scientifiquement exploitables tout en devenant beaucoup moins coûteux à traiter.
Transformer des ondes en nombres significatifs
Ensuite, les chercheurs ont découpé l’EEG continu en « époques » d’une seconde et décrit chaque segment par des statistiques simples et son contenu fréquentiel. Les caractéristiques temporelles, telles que l’amplitude moyenne, la variabilité, l’asymétrie et le nombre de passages par zéro, capturent la forme générale et l’énergie de l’activité cérébrale. Les caractéristiques fréquentielles se concentraient sur la puissance dans des bandes classiques comme le thêta (lié à l’effort et à la mémoire de travail), l’alpha (repos et inhibition), le bêta (attention active) et le gamma (traitement complexe). Ensemble, ces nombres forment une empreinte compacte de l’état cérébral pour chaque seconde, prête à être exploitée par un algorithme.
Apprendre à une forêt d’arbres de décision à lire la charge
Pour relier ces empreintes EEG à la charge cognitive, l’équipe a utilisé une méthode d’apprentissage automatique appelée régression par forêt aléatoire. Plutôt qu’une unique formule complexe, cette approche construit de nombreux arbres de décision simples qui émettent chacun une prédiction, puis les combine pour obtenir une réponse d’ensemble plus fiable. Le modèle a appris à prédire l’intensité d’activation de chaque région cérébrale, en traitant cette activation comme un substitut de l’effort mental. À travers les régions frontale, temporale, pariétale et occipitale, le modèle a très bien reproduit l’activation réelle, avec des scores de précision (R²) supérieurs à 0,93 et des résultats particulièrement bons dans la région temporale, qui joue un rôle dans l’intégration du son, de la mémoire et de la perception lors de tâches exigeantes.
Ce que le modèle révèle sur le cerveau en activité
En examinant les caractéristiques sur lesquelles la forêt aléatoire s’appuyait le plus, l’étude éclaire aussi la manière dont les signaux cérébraux reflètent la fatigue mentale. Les mesures d’énergie du signal et les pics en rafales (valeur efficace et kurtosis), ainsi que la puissance dans certaines bandes fréquentielles, se sont révélées particulièrement informatives. Les différentes régions mettaient en avant des caractéristiques distinctes : par exemple, l’activité bêta et gamma rapide dans les régions pariétales et occipitales correspondait à un fort traitement visuel et spatial, tandis que les motifs dans les signaux frontaux reflétaient la charge décisionnelle. Ces signatures spécifiques aux régions suggèrent que la méthode pourrait éventuellement être adaptée à des coiffes EEG plus légères ciblant uniquement les zones les plus informatives.
Du laboratoire aux blocs opératoires plus sûrs
Pour un public non spécialiste, la conclusion est simple : l’étude propose une recette pratique pour transformer des capteurs scalpaires et des algorithmes intelligents en un « indicateur d’effort mental » continu pour les chirurgiens. Bien que le travail actuel utilise des données archivées d’un groupe limité de participants, il montre qu’avec un nettoyage et une conception de caractéristiques soigneux, un modèle d’apprentissage automatique relativement simple peut suivre la charge cognitive avec une grande précision et à faible coût de calcul. À l’avenir, de tels systèmes pourraient aider les consoles robotiques à simplifier automatiquement les affichages, ajuster le rythme ou signaler les moments de surcharge, soutenant l’esprit des chirurgiens aussi fiablement que les robots soutiennent déjà leurs mains.
Citation: Atheef G A, M., Powar, O.S. Estimating cognitive workload in robot assisted surgery using time and frequency features from EEG epochs with random forest regression. Sci Rep 16, 7624 (2026). https://doi.org/10.1038/s41598-026-35986-5
Mots-clés: charge cognitive, chirurgie assistée par robot, monitorage EEG, apprentissage automatique, interface cerveau-machine