Clear Sky Science · fr
Influence des paramètres structurels sur l’espace de travail des robots parallèles de type delta et optimisation de l’adaptabilité de trajectoire pour le tri des feuilles de thé fraîches
Les robots entrent dans l’usine de thé
Les feuilles de thé fraîches sont délicates : écraser un bourgeon ou meurtrir une feuille altère la boisson finale. Pourtant, trier ces feuilles à la main est un travail fatigant et lent. Cet article étudie comment un robot industriel rapide et léger — appelé robot Delta — peut être ajusté pour se déplacer rapidement et avec précision au-dessus des tapis roulants à thé tout en manipulant les feuilles avec douceur et fiabilité.
Pourquoi les feuilles de thé nécessitent un traitement particulier
Dans la transformation moderne du thé, le tri des feuilles fraîches est essentiel pour la qualité et le prix. Les opérateurs humains peinent à suivre le rythme et à maintenir la constance, surtout pendant de longues heures. Les robots Delta, largement utilisés pour l’emballage à grande vitesse, semblent donc adaptés : ils sont rigides, précis et capables de déplacements rapides. Cependant, la plupart des conceptions antérieures visaient des objets génériques comme des boîtes ou des écrous, et non des bourgeons fragiles cantonnés dans une zone étroite entre deux convoyeurs. L’« espace de travail » du robot — la région tridimensionnelle qu’il peut atteindre — doit correspondre à cette zone restreinte et suivre un trajet en forme de portail : saisir, soulever, traverser puis déposer, sans heurter ses propres éléments ni manquer les cibles.
Comment la géométrie du robot contrôle son domaine d’action
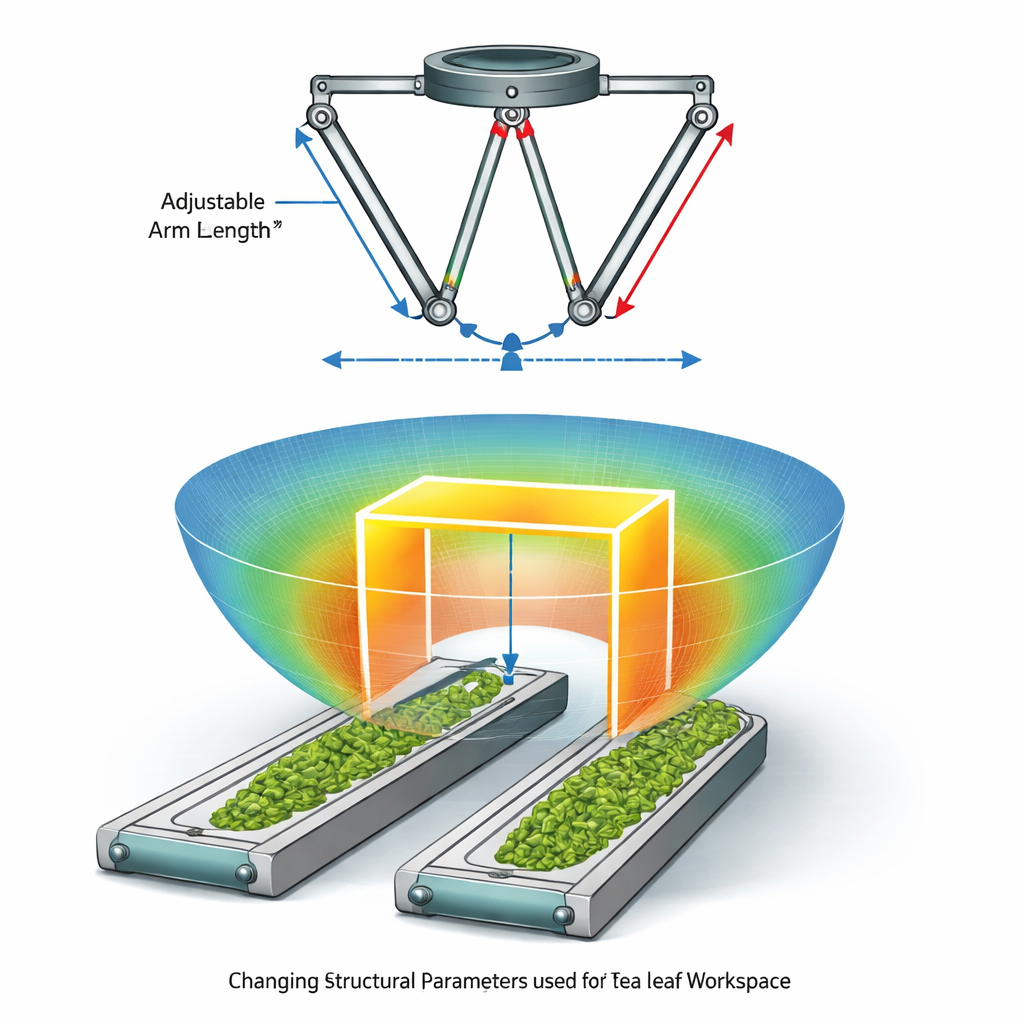
Les auteurs commencent par établir une description mathématique détaillée du mouvement du robot Delta. Ils relient les angles de ses trois articulations motrices à la position exacte de la petite plateforme mobile portant une pince par aspiration. À l’aide de calculs directs (angles → position) et inverses (position → angles), ils définissent chaque point que l’effecteur peut physiquement atteindre lorsque les angles des articulations sont limités à une plage sûre. Avec ces équations codées sous MATLAB, ils simulent le volume complet atteignable et l’affichent depuis plusieurs points de vue sous la forme d’un nuage de points coloré, en forme de coupe. Cet espace de travail sert ensuite de base pour évaluer si une conception mécanique donnée peut suivre le trajet de tri du thé.
Tester de nombreuses conceptions par des expériences virtuelles
Au lieu de construire plusieurs prototypes physiques, l’équipe considère quatre choix géométriques clés comme des réglages : la longueur des bras supérieurs (L), la longueur des bras inférieurs (l), le rayon du triangle de base fixe (R) et le rayon du triangle mobile (r). Ils utilisent un plan d’expérience orthogonal, qui échantillonne efficacement les combinaisons de ces quatre paramètres à trois niveaux chacun, produisant neuf robots virtuels. Pour chacun, le programme calcule le volume total de l’espace de travail et montre son recouvrement avec une boîte de trajectoire normalisée en forme de portail mesurant 200 mm de haut, 400 mm de large et 200 mm de profondeur. Cela permet aux chercheurs de voir non seulement la taille de chaque espace de travail, mais aussi s’il couvre effectivement la région où circulent les feuilles sur les tapis.
Identifier quelles dimensions comptent le plus
En comparant les neuf conceptions simulées, l’étude classe l’influence de chaque choix structurel sur l’atteignabilité utile. Le grand gagnant est la longueur du bras passif (inférieur) : des bras inférieurs plus longs agrandissent fortement l’espace de travail. Vient ensuite la longueur du bras actif (supérieur), qui étend aussi la portée mais peut introduire des vibrations s’il est trop long. Le rayon de la base a un effet modéré ; si la base est trop large, les bras mobiles entrent plus facilement en collision avec le cadre, ce qui réduit le volume véritablement utilisable. Le rayon de la plateforme mobile a l’effet le plus faible, mais une plateforme plus petite aide légèrement en libérant de l’espace pour le mouvement des bras. Des analyses de portée et de variance montrent que si certains ensembles de paramètres donnent le plus grand espace de travail total, ils ne couvrent pas nécessairement la région étroite en forme de portail qui importe pour le tri du thé.
Une conception adaptée à la ligne de thé
La configuration la plus pratique ne s’avère pas être celle avec le plus grand volume global, mais celle dont l’espace de travail enveloppe proprement la trajectoire en forme de portail. Une combinaison particulière — bras supérieurs de 250 mm, bras inférieurs de 400 mm, rayon de base de 90 mm et rayon de plateforme mobile de 50 mm — couvre entièrement le trajet requis entre les deux convoyeurs tout en gardant le robot compact et stable. À une hauteur de fonctionnement d’environ 325 mm au-dessus du plan de référence, le robot atteint sa plus grande portée utilisable, largement suffisante pour couvrir les deux bandes et réaliser le cycle saisir–soulever–translater–déposer sans quitter la zone sûre.
Ce que cela signifie pour les usines de thé de demain
Pour les non-spécialistes, le message clé est que de petits ajustements dans la longueur des membres du robot et la taille des plateformes peuvent faire la différence entre une machine qui se déplace avec panache dans l’espace libre et une machine qui fonctionne de façon fiable sur une ligne de production réelle. En quantifiant comment chaque paramètre structurel façonne le volume atteignable et son recouvrement avec une trajectoire en forme de portail réaliste, cette étude propose une recette pour concevoir des robots Delta qui trient les feuilles de thé rapidement, précisément et avec un minimum de dégâts. La même approche peut guider la conception de robots sur mesure pour d’autres aliments ou produits fragiles lorsque vitesse, précision et manipulation délicate doivent être réunies simultanément.
Citation: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Mots-clés: robot delta, tri des feuilles de thé, espace de travail du robot, pick-and-place, automatisation industrielle