Clear Sky Science · fr
Développement et évaluation d’un système de positionnement des patients guidé par la surface pour la thérapie par capture de neutrons au bore
Une visée plus précise pour les neutrons anticancéreux
La thérapie par capture de neutrons au bore (BNCT) est un traitement anticancéreux prometteur capable d’endommager sélectivement les cellules tumorales tout en épargnant une grande partie des tissus sains environnants. Mais pour que cette précision soit efficace, les cliniciens doivent placer le patient exactement au bon endroit devant une source de neutrons fixe—souvent à l’échelle du millimètre. Cet article décrit un nouveau système de positionnement guidé par caméra et robot conçu pour rendre cette mise en place délicate plus rapide, plus précise et moins tributaire de la dextérité et du jugement d’un technicien.
Pourquoi le positionnement est si crucial
Contrairement à de nombreux appareils modernes de radiothérapie qui peuvent se déplacer autour du patient et remodeler leurs faisceaux, la BNCT repose sur une source lourde et fixe de neutrons avec des possibilités limitées de déviation du faisceau. C’est donc le patient, et non le faisceau, qui doit être positionné au point exact. Traditionnellement, le personnel utilise des lasers, des repères sur la peau et des translations manuelles de la table. Ce processus est lent, dépend fortement de l’expertise de l’opérateur et peut laisser de petites erreurs de position qui modifient la dose effectivement reçue par la tumeur et les organes voisins. À mesure que des centres de BNCT traitent des tumeurs complexes de la tête, du cou et d’autres zones difficiles d’accès, ces limites deviennent un obstacle sérieux.
Un assistant high‑tech : caméras, logiciels et un robot
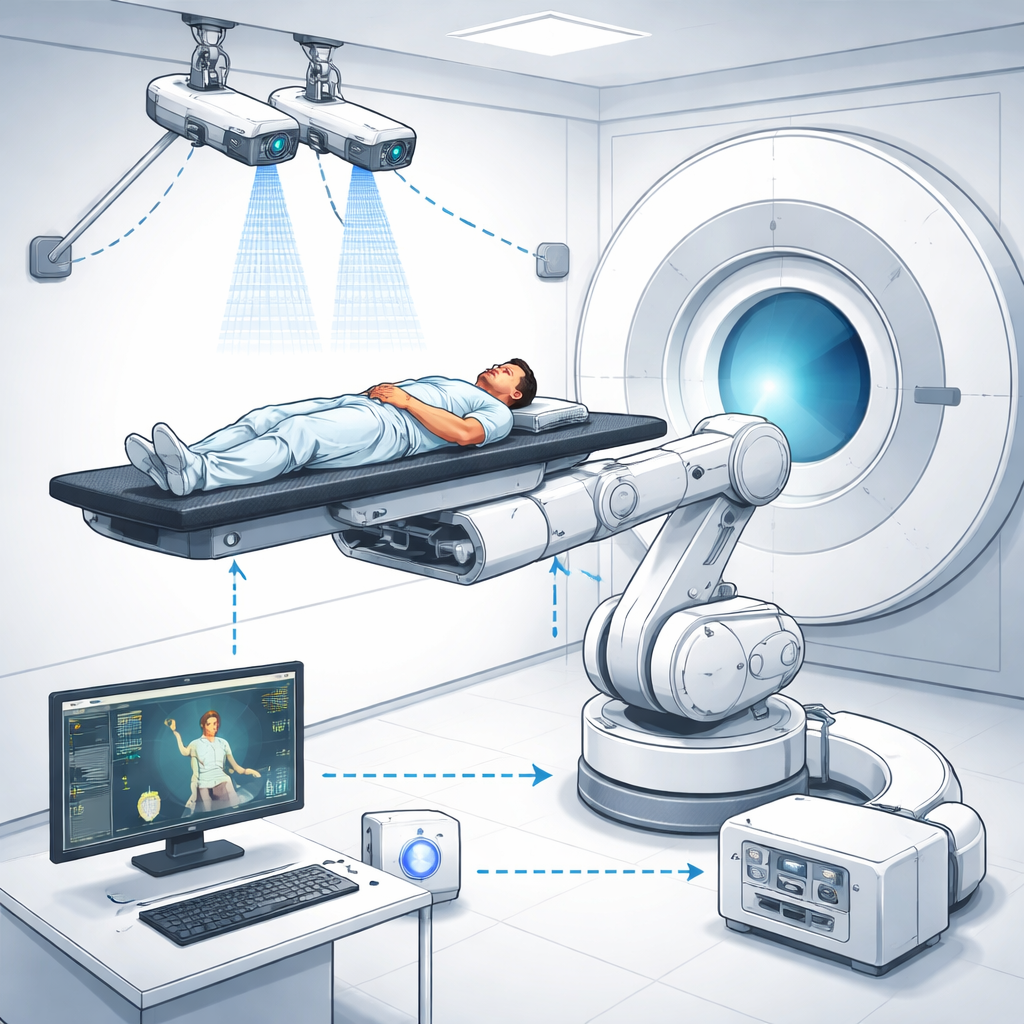
Pour relever ce défi, l’équipe de recherche a construit un système intégré SG‑BNCT (Surface‑Guided BNCT) qui combine trois éléments principaux : un logiciel de planification de traitement spécialisé nommé NeuMANTA, une paire de caméras stéréoscopiques binoculaires et un robot industriel à six axes portant la table de traitement. Dans NeuMANTA, les médecins planifient le traitement BNCT sur des images CT, en définissant le point exact que doit traverser le faisceau de neutrons et trois petits points de référence, ou marqueurs fiduciaires, sur la peau du patient. Ces marqueurs définissent la position du patient dans les images de planification et relient ce plan aux coordonnées réelles de la salle de traitement via des matrices de transformation mathématiques.
Comment les caméras 3D voient et corrigent la mise en place
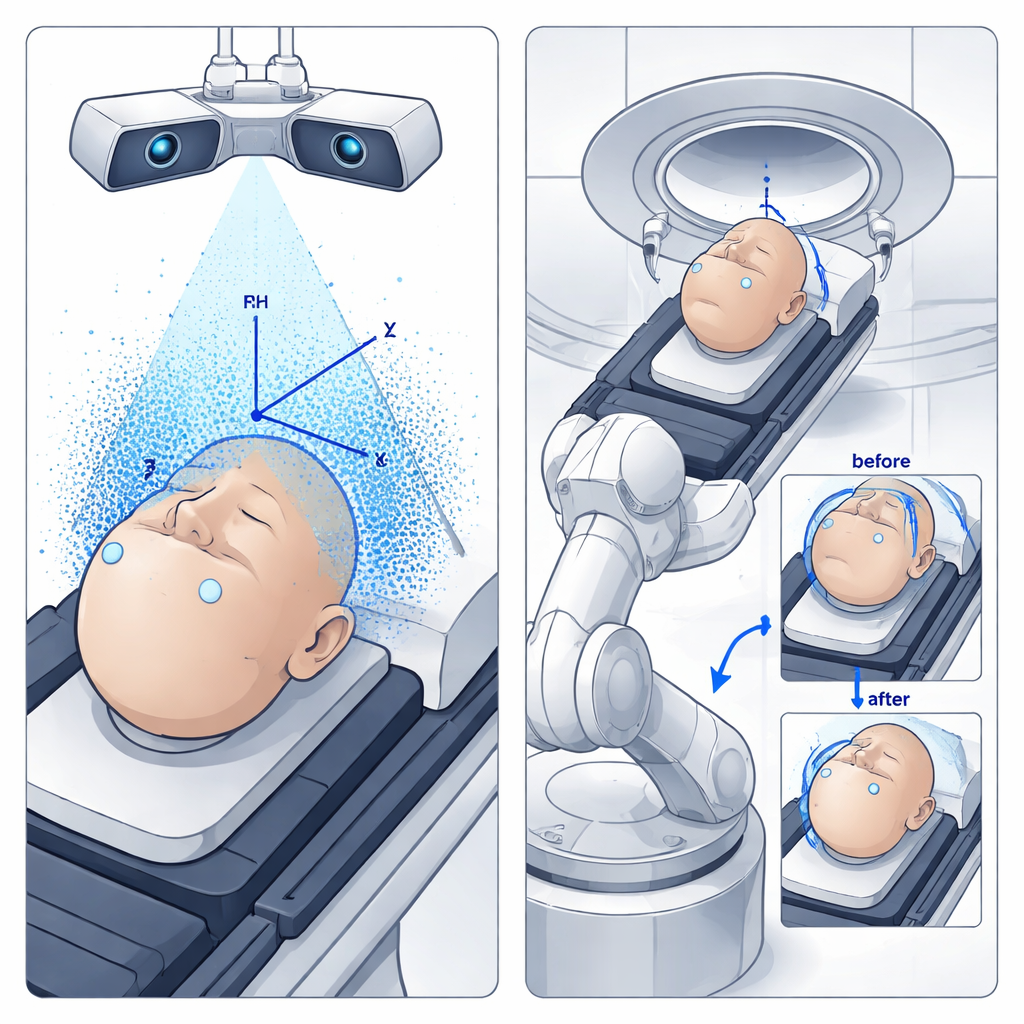
Dans la salle de traitement, deux caméras haute résolution observent le patient sous des angles différents, un peu comme des yeux humains. À l’aide d’un algorithme moderne de détection d’objets (YOLO) entraîné sur plus d’un millier d’images, le système repère rapidement les mêmes marqueurs fiduciaires sur la surface du patient. En comparant l’apparence de chaque marqueur dans les vues gauche et droite, l’ordinateur reconstruit leurs positions 3D et génère un nuage de points détaillé de la surface. À partir de trois marqueurs non collinéaires, il reconstitue un système de coordonnées patient et le compare au système de coordonnées défini dans le plan de traitement. Tout décalage entre la position planifiée et la position réelle est converti en commandes de translation et de rotation—six degrés de liberté au total—pour le robot industriel qui supporte la table du patient.
Tests avec un patient factice
Avant d’utiliser le système sur des patients réels, l’équipe l’a testé avec un fantôme anthropomorphe—un modèle en forme de corps humain—équipé de marqueurs internes et de surface visibles à la fois en CT et par les caméras. Ils ont créé plusieurs configurations de traitement dans NeuMANTA avec différentes directions de faisceau, puis ont demandé au système SG‑BNCT de reproduire automatiquement ces plans en déplaçant le fantôme. Un laser placé au centre de l’ouverture du faisceau neutronique a servi de substitut au faisceau réel, permettant aux chercheurs de mesurer directement l’écart entre le point final sur le fantôme et la cible prévue, à la fois le long de l’axe du faisceau (distance source‑peau) et latéralement dans le plan perpendiculaire au faisceau.
À quelle précision le système est‑il parvenu ?
Sur 24 configurations expérimentales, les erreurs de positionnement du système étaient généralement inférieures à 1 millimètre dans les deux directions, les pires erreurs en une seule passe atteignant environ 2 à 3 millimètres le long de l’axe du faisceau. Les auteurs attribuent ces écarts résiduels à trois sources principales : l’épaisseur des coupes d’imagerie CT, de petites incertitudes d’étalonnage des caméras stéréoscopiques et de minimes imprécisions au niveau du pixel lors de la détection logicielle des marqueurs. De manière importante, le système est conçu pour fonctionner en boucle fermée : il relève à plusieurs reprises la position des marqueurs, met à jour l’alignement 3D et commande des ajustements supplémentaires du robot jusqu’à ce que l’erreur restante soit inférieure à un seuil prédéfini. Dans ces tests itératifs, les écarts finaux sont systématiquement retombés bien en dessous du millimètre, atteignant un alignement submillimétrique en profondeur comme en latéral.
Qu’est‑ce que cela signifie pour les patients
Pour les patients susceptibles de bénéficier de la BNCT—en particulier ceux ayant des tumeurs dans des régions complexes ou sensibles—ce système de positionnement guidé par la surface et assisté par robot promet des traitements plus fiables et plus efficaces. En reliant le logiciel de planification directement à des caméras qui voient le patient réel et à un robot capable d’exécuter des mouvements précis, la méthode réduit la dépendance aux alignements laser manuels et aux approximations humaines. Bien que la version actuelle soit trop lente pour un suivi en temps réel des mouvements, et que seules des évaluations statiques aient été réalisées jusqu’ici, les résultats montrent que la technologie peut positionner de façon routinière un patient avec une précision submillimétrique. Avec des améliorations de vitesse et un renforcement de la résistance des composants aux radiations, cette approche pourrait devenir une base pratique pour des traitements BNCT plus sûrs et plus constants en clinique.
Citation: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
Mots-clés: thérapie par capture de neutrons au bore, positionnement du patient, vision stéréoscopique, robotique médicale, guidage par surface