Clear Sky Science · fr
Application d’un algorithme de réseau de convolution temporelle fusionné avec un module d’attention par canal pour la localisation intérieure UWB
Pourquoi il est si difficile de localiser des personnes à l’intérieur
Les smartphones, les robots et les engins d’entrepôt doivent connaître leur position avec précision, même lorsque les satellites GPS ne peuvent pas les atteindre à l’intérieur des bâtiments. La radio ultra‑large bande (UWB) est devenue une candidate de premier plan pour cette tâche parce qu’elle peut mesurer des distances avec une précision de l’ordre du centimètre. Pourtant, dans des espaces réels encombrés de cloisons, de vitrages et de personnes en mouvement, ces signaux radio rebondissent, se dévient ou sont temporairement bloqués, provoquant des sauts brusques dans la position rapportée. Cet article présente une nouvelle méthode basée sur l’intelligence artificielle qui rend la localisation UWB beaucoup plus précise et stable dans de tels environnements intérieurs perturbés.
Des impulsions radio dans une pièce encombrée
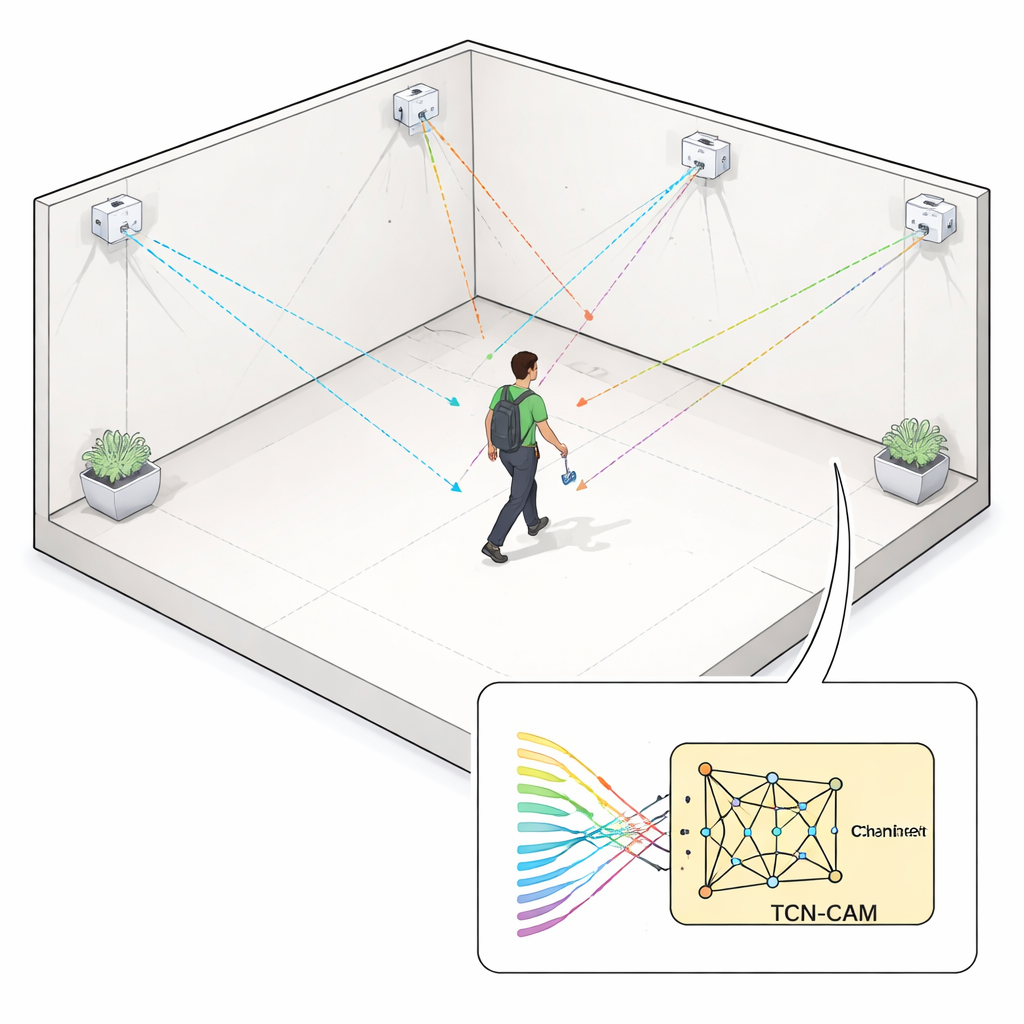
Les systèmes UWB localisent un dispositif, appelé tag, en mesurant le temps que mettent des impulsions radio extrêmement courtes pour voyager entre le tag et plusieurs stations fixes. Dans des espaces simples et ouverts, cette approche de « temps d’arrivée » fonctionne bien. Mais à l’intérieur, les signaux suivent souvent des trajets indirects — rebondissant sur des portes, des fenêtres ou des personnes — avant d’atteindre un récepteur. Ces trajectoires non‑visibles en ligne droite, dites NLOS, font paraître le tag plus éloigné qu’il ne l’est réellement. Les solutions traditionnelles reposent sur des filtres mathématiques finement réglés ou sur des outils d’apprentissage automatique qui tentent d’abord d’étiqueter chaque signal comme propre ou altéré. Si utiles soient‑elles, ces méthodes dépendent fortement d’un réglage expert ou peinent encore lorsque des personnes se déplacent de façon imprévisible dans l’espace.
Laisser les données raconter l’histoire au fil du temps
Les chercheurs proposent une stratégie différente : au lieu de traiter chaque lecture de distance isolément, ils observent comment les lectures évoluent dans le temps et laissent un modèle d’apprentissage profond apprendre les motifs. Leur outil principal est un réseau de convolution temporelle (TCN), un type de réseau neuronal conçu pour les données temporelles. À la différence des réseaux récurrents qui traitent les instants les uns après les autres, les TCN utilisent des convolutions unidimensionnelles capables d’examiner de longues séquences historiques en parallèle. Cette architecture évite des problèmes d’entraînement courants et permet au modèle de détecter des tendances subtiles et plus longues — par exemple comment une personne passant entre le tag et une station prolonge temporairement la distance mesurée avant qu’elle ne revienne brusquement.
Apprendre au réseau où porter son attention
Au‑dessus du TCN, l’équipe ajoute un module d’attention par canal (CAM). Chaque station produit son propre flux de lectures de distance, et toutes ne sont pas également fiables à chaque instant. Le CAM apprend à attribuer des poids différents à ces flux, en renforçant ceux qui paraissent cohérents et en atténuant ceux qui semblent corrompus par des réflexions ou des blocages. Ensemble, le réseau TCN‑CAM combiné prend en entrée des distances brutes et bruyantes provenant de six stations et fournit en sortie la meilleure estimation des coordonnées tridimensionnelles du tag, le tout en une étape de bout en bout sans étape distincte de classification des signaux.
Tests en bruit simulé et dans de vrais couloirs
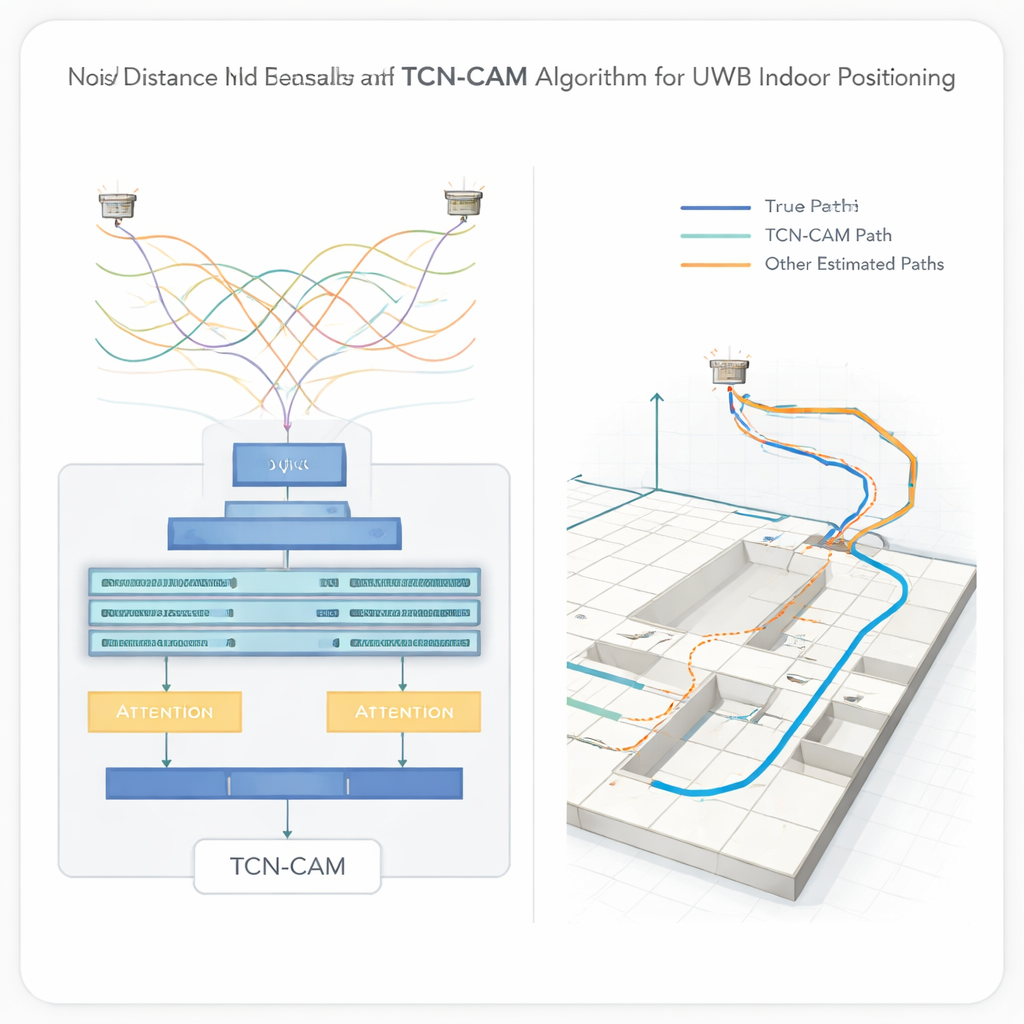
Pour vérifier l’efficacité de la méthode, les auteurs ont d’abord créé des milliers de positions intérieures virtuelles et simulé des mesures UWB avec différents niveaux de bruit ajouté et d’erreurs NLOS. Ils ont comparé leur approche TCN‑CAM avec trois concurrents : un réseau LSTM avec attention, un TCN standard, et un réseau convolutionnel avec attention par canal. À mesure que les interférences simulées augmentaient, les erreurs ont cru pour toutes les méthodes, mais TCN‑CAM a systématiquement produit les erreurs les plus faibles et la dispersion la plus réduite des résultats, indiquant à la fois une meilleure précision et une plus grande fiabilité. Dans les conditions de test les plus sévères, il a réduit les erreurs moyennes de position d’environ un quart à une moitié par rapport aux autres méthodes.
Du laboratoire au mouvement réel
L’équipe est ensuite passée à un site d’essai intérieur réel équipé de six stations UWB, d’un instrument de topographie haute précision et de personnes circulant pour provoquer volontairement des blocages de signal. Le nouvel algorithme a localisé le tag en mouvement avec une erreur moyenne de seulement 3,32 centimètres. C’était environ 19 % de mieux qu’un TCN simple, 25 % de mieux que le modèle convolution‑plus‑attention, et une amélioration notable de 76 % par rapport à l’approche basée sur LSTM. Les résultats TCN‑CAM non seulement se regroupent plus étroitement autour de la trajectoire réelle, mais suivent aussi la trajectoire tridimensionnelle du tag plus fidèlement dans toutes les directions.
Ce que cela signifie pour la technologie de tous les jours
Pour les non‑spécialistes, la conclusion est simple : en laissant un modèle intelligent observer comment les lectures de distance UWB évoluent dans le temps et apprendre quels signaux mériter de confiance à chaque instant, la localisation intérieure peut devenir beaucoup plus précise et moins sujette à des sauts, même lorsque des personnes se déplacent et obstruent le trajet radio. Bien que la méthode doive être réentraînée si les stations fixes sont déplacées, elle offre une solution puissante et pratique pour les usines, hôpitaux, entrepôts et bâtiments intelligents où l’infrastructure reste en place. À mesure que des techniques d’apprentissage profond similaires mûriront et commenceront à fusionner l’UWB avec d’autres capteurs, les dispositifs d’intérieur de toutes sortes pourraient bientôt connaître leur position presque aussi fiablement que votre téléphone en extérieur.
Citation: He, L., Lian, Z., Núñez-Andrés, M.A. et al. Application of a temporal convolutional network algorithm fused with channel attention module for UWB indoor positioning. Sci Rep 16, 6305 (2026). https://doi.org/10.1038/s41598-026-35802-0
Mots-clés: localisation intérieure, ultra‑large bande, apprentissage profond, analyse de séries temporelles, suivi de position