Clear Sky Science · fr
Suivi global dynamique pour le pistage en ligne multi-caméras et multi-véhicules
Pourquoi des caméras de trafic plus intelligentes sont importantes
Toute personne coincée dans un embouteillage ou inquiète des risques d’accident a ressenti les limites des systèmes de circulation actuels. Les villes modernes installent désormais des réseaux de caméras le long des autoroutes et aux intersections pour surveiller le trafic en temps réel. Mais faire collaborer ces caméras — suivre le même véhicule de façon fluide d’un point de vue à l’autre — est étonnamment difficile. Cette étude présente une nouvelle méthode pour suivre des véhicules à travers de nombreuses caméras simultanément, promettant une surveillance plus rapide et plus fiable qui pourrait rendre les routes plus sûres et la gestion du trafic plus réactive.
Le problème des systèmes de suivi actuels
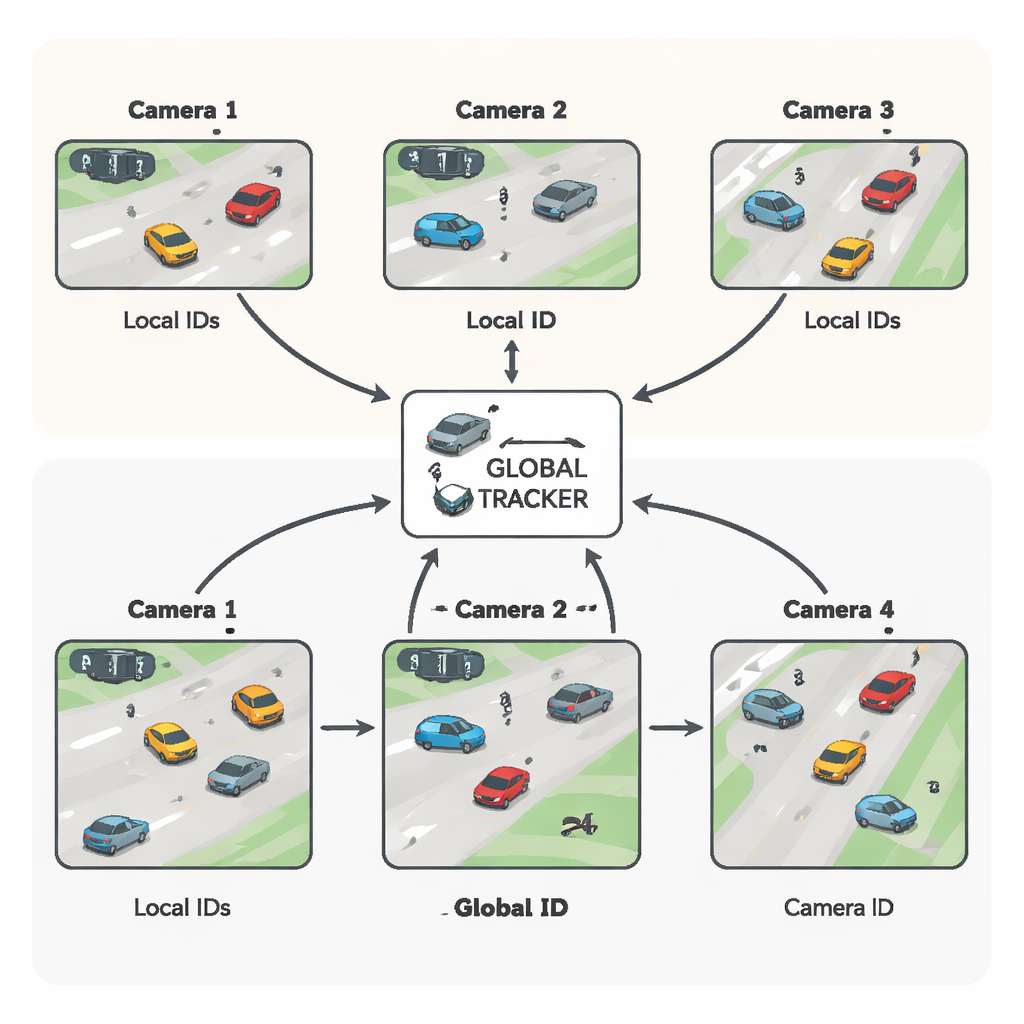
Les systèmes traditionnels considèrent chaque caméra presque comme un petit monde à part. D’abord, ils détectent les véhicules dans chaque vidéo, puis construisent de courts trajets pour chaque voiture à l’intérieur du champ d’une caméra. Ce n’est qu’après avoir analysé de longues séquences vidéo enregistrées qu’ils tentent de « coudre » ces trajectoires entre les caméras en utilisant des regroupements de données lourds et des règles artisanales sur la configuration des routes et la position des caméras. Ce mode hors ligne, a posteriori, est lent, gourmand en calcul et peine lorsque les scènes de trafic changent, que les caméras sont déplacées ou que de nouveaux points de vue sont ajoutés. Il rencontre aussi des difficultés lorsque les caméras montrent les véhicules à des tailles et des angles très différents, ce qui peut faire paraître la même voiture comme deux véhicules totalement distincts.
Une nouvelle voie : tout suivre en temps réel
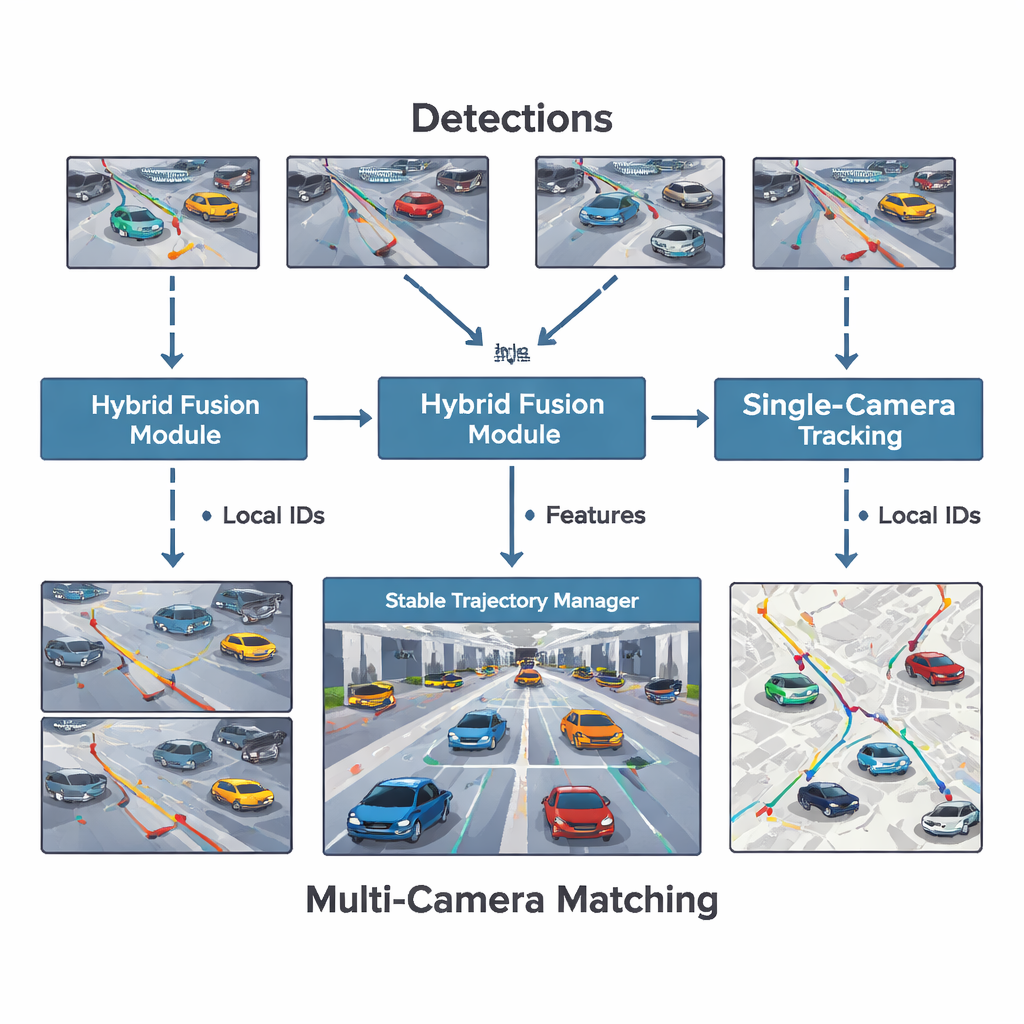
Les auteurs proposent un cadre inédit appelé Suivi Global Dynamique, ou DGT, conçu dès l’origine pour un usage en temps réel. Au lieu d’attendre que toutes les vidéos soient collectées puis de tenter de relier les trajectoires, DGT construit ces liens à la volée. Chaque caméra détecte toujours les véhicules et crée de courts parcours intra-caméra, mais dès que ces trajectoires sont mises à jour, elles sont immédiatement comparées aux trajectoires des autres caméras. Un algorithme classique d’appariement est utilisé pour décider si deux trajectoires provenant de vues différentes appartiennent au même véhicule. Ce processus en ligne, étape par étape, remplace le regroupement massif sur l’ensemble des données passées, réduit les calculs et rend possible le suivi du trafic en direct.
Reconnaître le même véhicule sous différents angles
Un défi majeur est que le même véhicule peut apparaître grand et détaillé dans une caméra et minuscule et flou dans une autre, ou être éclairé différemment dans un tunnel par rapport à une route ouverte. Pour faire face à cela, DGT inclut un module de fusion hybride qui combine les détails fins et le contexte plus large de chaque image. Il traite simultanément les images des caméras selon deux voies : une branche se concentre sur les détails nets et à petite échelle comme les contours et les textures, tandis que l’autre privilégie des motifs et un contexte plus globaux. Le système combine ensuite les deux vues en une description unique et stable de l’apparence du véhicule. Les tests montrent que cette approche maintient une confiance élevée du système, même lorsque la taille ou la clarté du véhicule varie fortement entre les caméras.
Maintenir des trajectoires stables et fiables
DGT introduit également un Gestionnaire de Trajectoire Stable, qui fonctionne comme un centre de contrôle qualité pour les décisions de suivi. Il filtre les détections incertaines, gère la durée pendant laquelle un véhicule peut disparaître derrière un autre véhicule ou un obstacle avant d’être considéré comme « disparu », et élimine les objets qui ne bougent pas avec le temps, comme les voitures garées ou les barrières routières. Des seuils temporels et de mouvement choisis avec soin permettent au système de distinguer entre une voiture momentanément cachée dans un tunnel et une voiture qui a réellement quitté la scène ou est passée dans le champ d’une autre caméra. Ensemble, ces règles contribuent à maintenir des identifiants cohérents pour chaque véhicule, réduisant les sauts brusques, les pertes ou les fusions erronées entre trajectoires.
Ce que cela signifie pour les routes au quotidien
Lors d’essais à grande échelle réalisés à la fois dans un tunnel autoroutier chinois et à une intersection animée d’une ville américaine, DGT a obtenu une forte précision tout en étant suffisamment rapide pour un usage en temps réel. Contrairement à de nombreux systèmes antérieurs optimisés pour un type de scène unique, DGT a géré des vues de caméras à la fois superposées et non superposées sans nécessiter d’informations manuelles détaillées sur la configuration des routes. Pour les conducteurs et les habitants des villes, ce type de suivi robuste et flexible signifie que les centres de gestion du trafic pourraient réagir plus rapidement aux accidents, aux congestions ou aux comportements inhabituels, en s’appuyant sur une image plus claire et continue de la façon dont les véhicules se déplacent à travers le réseau de routes et de caméras.
Citation: Chen, X., Chan, S., Bin, G. et al. Dynamic global tracker for online multi camera multi vehicle tracking. Sci Rep 16, 6101 (2026). https://doi.org/10.1038/s41598-026-35768-z
Mots-clés: suivi de véhicules multi-caméras, systèmes de transport intelligents, surveillance du trafic en temps réel, vision par ordinateur, villes intelligentes