Clear Sky Science · fr
Explorer les profondeurs océaniques : révéler des trésors cachés avec l’IoT et un modèle hybride profond assemblé
Pourquoi l’exploration des fonds marins passe à la haute technologie
Les grands fonds marins et le sous‑sol qu’ils recouvrent dissimulent des câbles, des canalisations, des ruines anciennes et des écosystèmes fragiles. Pourtant, l’eau trouble, les bancs de sable en mouvement et les signaux faibles rendent étonnamment difficile l’identification de ce qui se trouve là‑dessous. Cet article décrit une nouvelle façon de combiner plusieurs types de capteurs avec l’intelligence artificielle afin que les robots sous‑marins et les systèmes de surveillance puissent repérer des objets importants de manière plus précise, plus rapide et en consommant moins d’énergie. Ce travail pourrait contribuer à protéger la vie marine, sécuriser des infrastructures et ouvrir de nouveaux horizons d’exploration.
Plusieurs capteurs, une image partagée des profondeurs
Les dispositifs de détection sous‑marins actuels s’appuient en général sur un seul sens : une impulsion sonar, une caméra vidéo ou un type de capteur de sol. Chacun fonctionne bien dans des conditions idéales, mais ils faiblissent quand l’eau devient trouble, que la lumière s’atténue ou que le bruit augmente. Les chercheurs imaginent plutôt l’océan comme un espace surveillé par un Internet des objets : de petits dispositifs en réseau qui écoutent, regardent et ressentent de différentes manières. Leur système fusionne les données des caméras, du radar pénétrant le sol, des capteurs de vibrations sismiques, des sondes thermiques et des détecteurs électromagnétiques en un flux commun pour analyse. En combinant ces points de vue, le système peut reconnaître un objet même lorsqu’un capteur est perturbé par la boue, les bulles ou les réflexions. 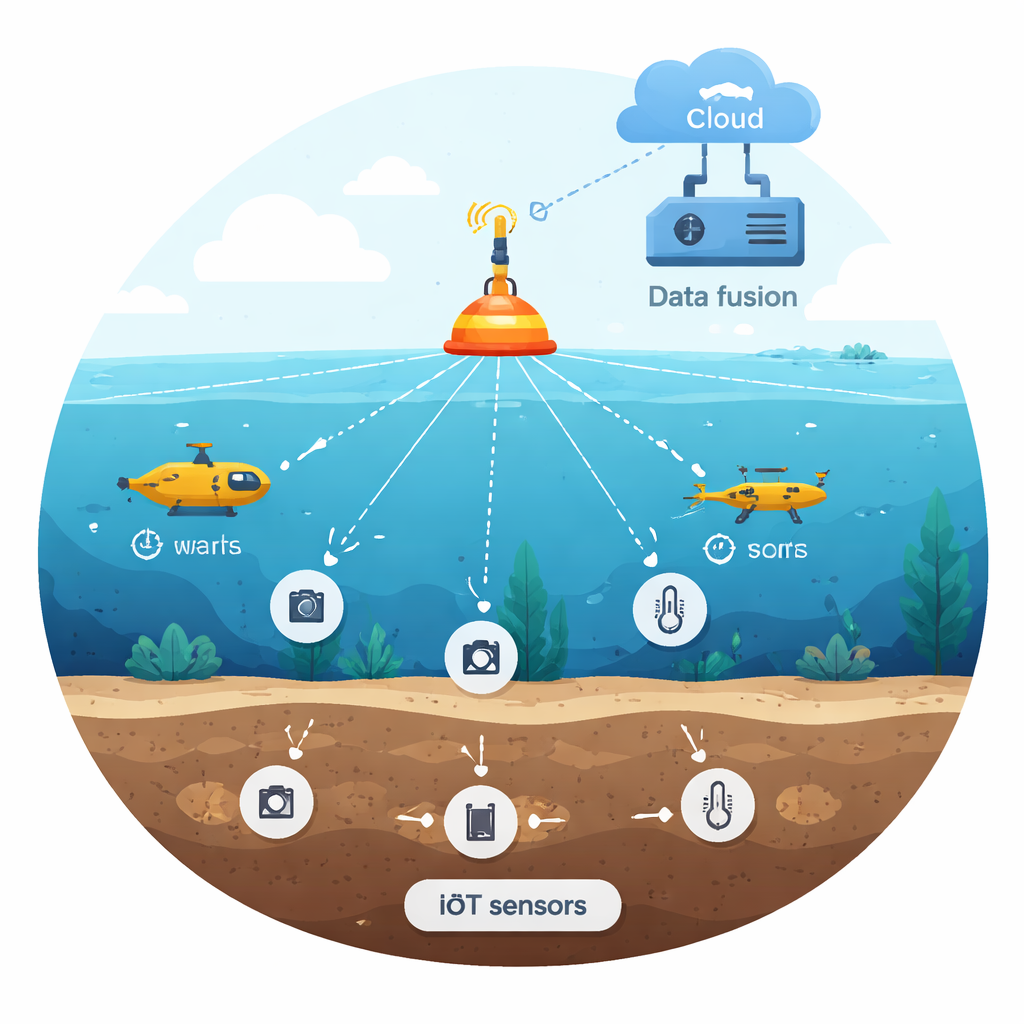
Nettoyer des signaux brouillés avant qu’ils n’atteignent le cerveau
Les données brutes recueillies sous l’eau sont loin d’être parfaites. Elles sont parsemées de pics aléatoires, de trous et de lectures étranges dus aux courants changeants, aux animaux en mouvement et aux interférences électroniques. Avant que tout algorithme intelligent ne prenne des décisions, les auteurs passent ces données par une chaîne de nettoyage rigoureuse. Ils utilisent des filtres médian pour lisser les bruits soudains sans estomper les véritables caractéristiques, des contrôles statistiques pour repérer et éliminer les valeurs aberrantes, et une synchronisation afin que les mesures des différents dispositifs s’alignent dans le temps. Ils re‑normalisent aussi les valeurs pour qu’un capteur puissant n’écrase pas les plus faibles, transforment des traces radar unidimensionnelles en images et emploient des techniques modernes pour réduire des centaines de mesures à un ensemble plus petit et plus informatif. Tout cela vise à fournir au système d’apprentissage une image nette plutôt qu’un flou chaotique.
Un moteur d’apprentissage hybride qui détecte des motifs et prend des décisions
Au cœur de l’approche se trouve ce que les auteurs appellent un modèle d’Ensembled Deep Hybrid Learning (EDHL). Il comporte deux parties principales qui jouent des rôles complémentaires. D’abord, un réseau neuronal profond de type Inception fait office de « yeux », scannant les images issues des capteurs à plusieurs échelles à la fois pour saisir à la fois les détails fins, comme un câble, et les formes plus larges, comme un affleurement rocheux. Il produit à partir de cela des descriptions numériques riches de chaque scène. Ensuite, un classifieur par gradient boosting fait office de « comité de décision ». Il construit de nombreux petits arbres de décision qui corrigent chacun les erreurs des autres, affinant progressivement la réponse correcte sur la nature de l’objet présent. Une étape de sélection de caractéristiques retient uniquement les signaux les plus informatifs, réduisant la mémoire et accélérant le système final sans jeter ce qui compte vraiment. 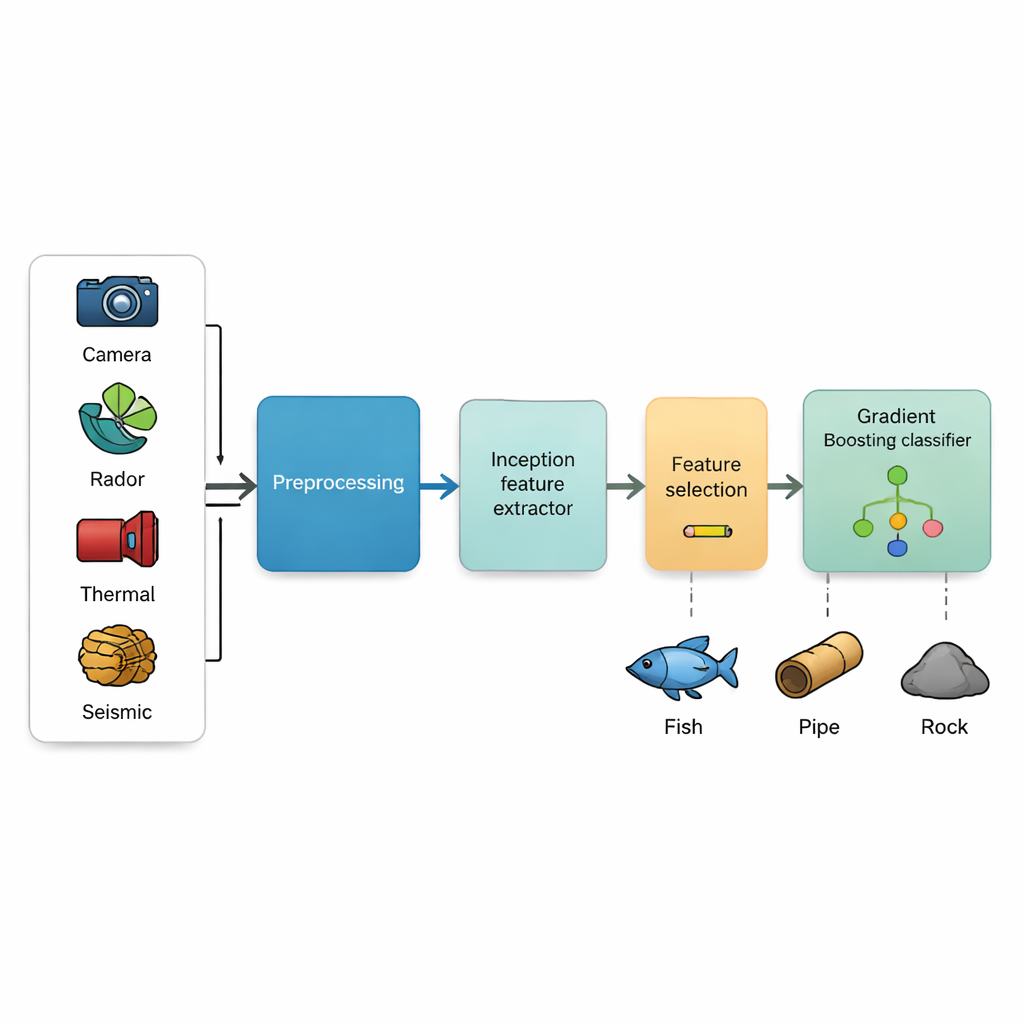
Mettre le système à l’épreuve
Pour vérifier si leur conception fonctionne en pratique, l’équipe l’a entraînée et évaluée à l’aide d’une grande collection publique d’images sous‑marines comprenant des poissons, des coraux, des éponges, des algues, des coquillages, des crustacés et d’autres scènes de fond marin. Ils ont comparé de nombreuses variantes de nettoyage des données et de sélection de caractéristiques, et ont opposé leur modèle à des systèmes d’apprentissage profond bien connus tels que les réseaux convolutifs classiques, ResNet, DenseNet, EfficientNet, les réseaux à capsules et même des modèles basés sur les transformeurs. La configuration EDHL, en particulier lorsqu’elle est associée à un nettoyage soigneux du bruit et à une sélection de caractéristiques basée sur la corrélation, a atteint une précision supérieure à 98 %, avec bien moins de fausses alertes et d’objets manqués que ses concurrents. Fait important, elle a conservé cette performance élevée en s’exécutant sur du matériel modeste comparable à ce qui peut être utilisé sur des dispositifs en périphérie, et pas uniquement sur des serveurs de laboratoire puissants.
Ce que cela signifie pour l’exploration océanique future
Pour les non‑spécialistes, l’essentiel est que les auteurs ont construit un système « sentir‑et‑penser » plus intelligent pour le monde sous‑marin. En associant des capteurs IoT divers à un moteur d’apprentissage hybride, ils montrent qu’il est possible de repérer et de classifier des objets du fond marin de manière très fiable sans nécessiter des ordinateurs volumineux ni des conditions d’observation parfaites. À l’avenir, ce type de technologie pourrait aider des essaims de robots sous‑marins à cartographier les fonds marins, surveiller des habitats fragiles, suivre la pollution et inspecter des infrastructures enterrées avec moins d’erreurs et une consommation d’énergie réduite. Cela transforme l’environnement chaotique et hostile des grands fonds en un lieu où les sens numériques peuvent enfin voir suffisamment clairement pour en révéler les trésors cachés.
Citation: Tada, S., Jeevanantham, V. Exploring oceanic depths: unveiling hidden treasures with IoT and ensembled deep hybrid learning model. Sci Rep 16, 5333 (2026). https://doi.org/10.1038/s41598-026-35634-y
Mots-clés: détection d’objets sous‑marins, capteurs IoT, apprentissage profond, exploration marine, détection multimodale