Clear Sky Science · fr
Conception et mise en œuvre d’un contrôle de bras robotique 6-DoF avec détection d’objets basée sur l’apprentissage automatique utilisant un microcontrôleur miniature
Des bras robotisés plus intelligents avec un budget réduit
Imaginez un bras robotisé d’usine capable de repérer un objet, de décider comment le saisir et de se déplacer en douceur pour le positionner — le tout sans dépendre d’un ordinateur volumineux ni d’une connexion cloud. Cet article décrit exactement cela : un bras robotique à six articulations (6-DoF) qui voit et réfléchit grâce à un microcontrôleur minuscule et peu coûteux. Pour les lecteurs curieux de voir comment l’intelligence artificielle s’éloigne des centres de données pour pénétrer les machines du quotidien, ce travail montre comment une vision et un contrôle avancés peuvent s’exécuter sur du matériel à peine plus grand qu’une clé USB.
Pourquoi réduire le « cerveau » des robots est important
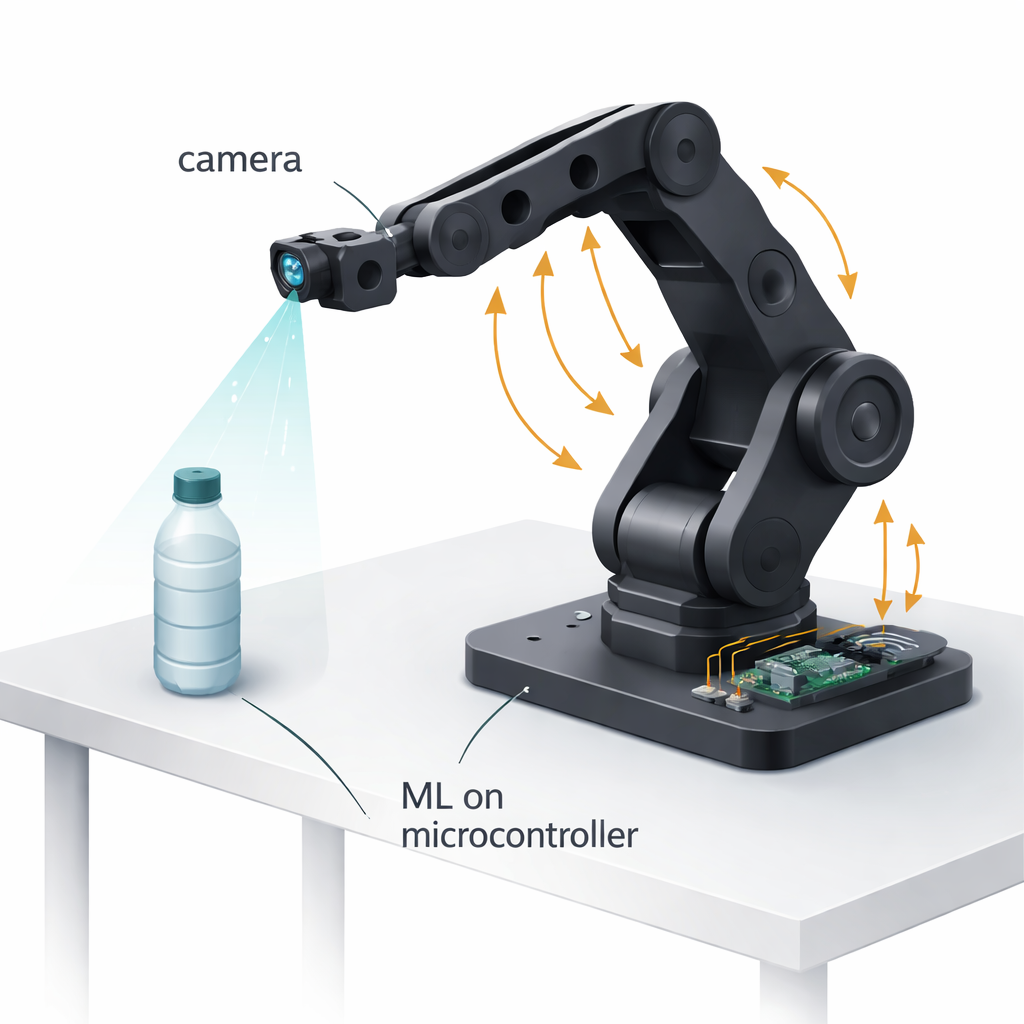
Les robots industriels traditionnels dépendent souvent d’ordinateurs externes puissants pour reconnaître les objets et planifier les mouvements. Cela augmente les coûts, le câblage et la complexité technique, ce qui peut être un obstacle pour les petites et moyennes entreprises. Les auteurs ont voulu démontrer qu’un seul microcontrôleur peu coûteux pouvait faire presque tout : voir les objets, estimer leur position en 3D, planifier les mouvements du bras et piloter les moteurs qui exécutent la tâche. En gardant le traitement embarqué, le système devient plus portable, plus économe en énergie et plus facile à déployer dans des environnements exigus ou changeants, des petites usines aux laboratoires pédagogiques.
Un bras flexible qui se construit lui‑même
L’équipe a conçu un bras robotique à six articulations en partant de zéro, en utilisant principalement des pièces en plastique imprimées en 3D pour le maintenir léger et abordable. Des servomoteurs de type hobby à couple élevé déplacent chaque articulation, et les chercheurs ont modifié ces moteurs pour lire en retour leurs angles exacts en temps réel, permettant un contrôle en boucle fermée précis. Une pince à deux doigts sur mesure à l’extrémité intègre un capteur de courant simple : en surveillant l’intensité consommée par le moteur de la pince, le système peut déduire la force d’étreinte et ajuster automatiquement sa prise pour maintenir l’objet sans l’écraser ni le faire tomber. Montée sur le « poignet » du bras, une petite caméra Full HD se déplace avec l’ensemble, offrant au système une vue subjective de la scène devant la pince.
Apprendre à une puce minuscule à détecter des bouteilles
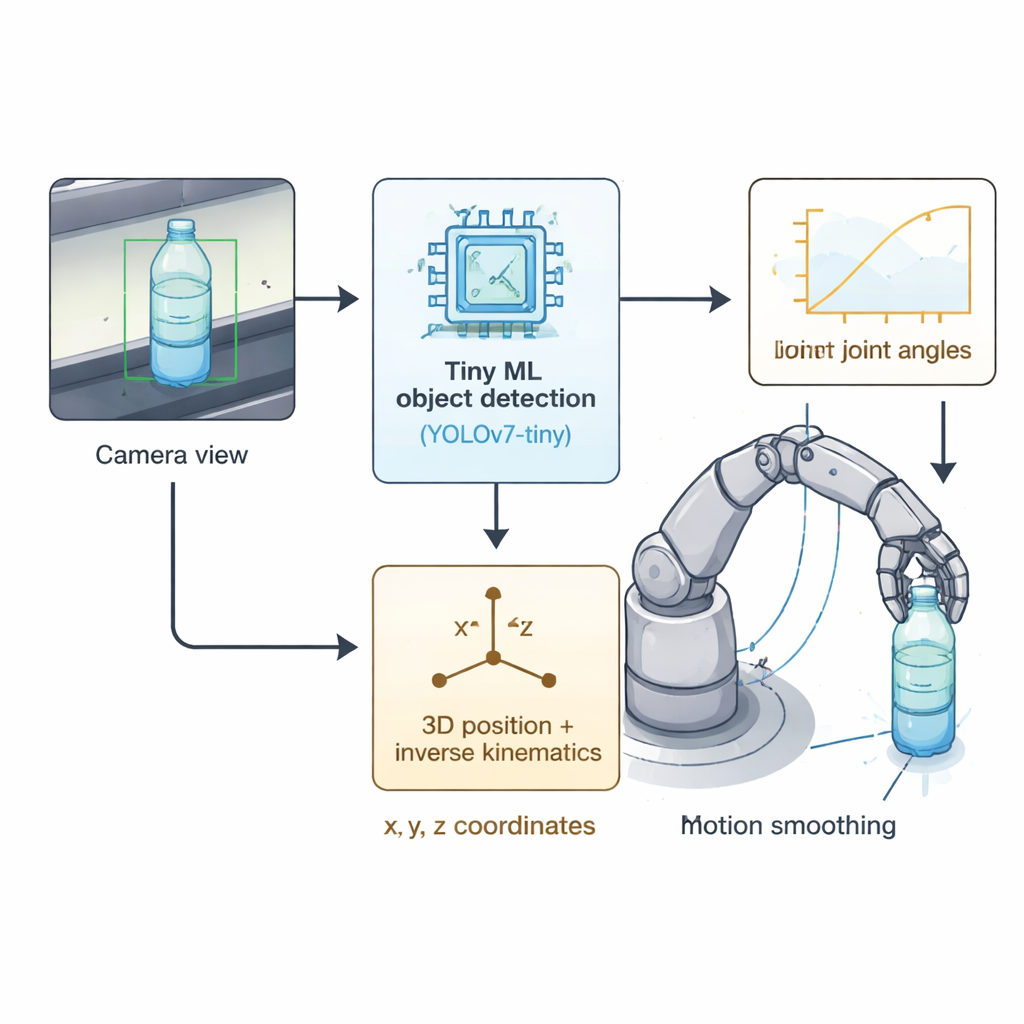
Au cœur de la vision du système se trouve une version compacte d’un réseau de détection d’objets populaire nommé YOLOv7-tiny. Les chercheurs ont entraîné ce modèle sur plus de 2 500 images de bouteilles d’eau en plastique prises sous une grande variété d’angles d’éclairage, de distances et d’occlusions partielles. Après entraînement sur une carte graphique puissante, ils ont compressé le modèle en une forme 8 bits « tiny ML » afin qu’il tienne dans la mémoire et sur la puissance de calcul limitées du microcontrôleur AMB82-Mini. Même ainsi réduit, le modèle a atteint environ 88 % de précision pour repérer les bouteilles et tournait assez vite — environ 7 à 8 images par seconde — pour un travail de prise et dépose en temps réel directement sur le microcontrôleur, sans aide d’un PC ni du cloud.
Des pixels au mouvement précis
Une fois que la caméra détecte une bouteille, le système calcule le centre de la boîte de détection dans l’image et estime la distance de l’objet en se basant sur sa taille en pixels. Cela fournit des coordonnées x, y et z dans l’espace. Un solveur mathématique sur mesure traduit ensuite ces coordonnées en les six angles d’articulation que le bras doit atteindre, en utilisant la cinématique robotique standard mais optimisée pour s’exécuter rapidement sur le petit processeur. Le logiciel de contrôle, organisé en une machine à états simple, enchaîne la détection de l’objet, le déplacement vers celui‑ci, la fermeture de la pince en utilisant le capteur de courant comme senseur tactile, puis le transport vers un point de dépôt fixe. Pour conserver des mouvements fluides et éviter les oscillations, l’équipe utilise des courbes d’adoucissement de mouvement soigneusement conçues et une méthode spéciale de modulation de tension qui réduit les vibrations et les dépassements moteurs.
Tests en conditions réelles et enseignements
Lors d’expériences répétées, le système intégré a démontré sa capacité à saisir et déposer de manière fiable des bouteilles en plastique pesant jusqu’à 300 grammes avec un taux de réussite de 100 %, et à conserver de bonnes performances sur des charges plus lourdes jusqu’à 500 grammes. Simulations et mesures ont montré que les erreurs de positionnement étaient typiquement de l’ordre du millimètre — suffisant pour de nombreuses tâches de tri et d’emballage. Par rapport à des schémas de contrôle plus basiques, la stratégie de commande des moteurs des auteurs a réduit les vibrations, raccourci le temps d’assiette du bras et éliminé les à‑coups. Bien que les tests se soient focalisés sur un type d’objet et des distances fixes en conditions intérieures contrôlées, ils fournissent une preuve convaincante que la perception et le contrôle robotique sérieux peuvent être concentrés sur une seule carte embarquée très modeste.
Ce que cela signifie pour l’automatisation du quotidien
Pour les non-spécialistes, la principale conclusion est que les capacités avancées de « voir » et de « bouger » ne sont plus réservées aux robots coûteux et gourmands en énergie. En combinant des modèles d’apprentissage machine miniatures, une géométrie intelligente et un contrôle moteur soigné sur un microcontrôleur à bas coût, ce travail montre une voie vers des bras robotisés compacts et autonomes que les petits fabricants, les établissements scolaires et les passionnés pourraient réellement adopter. À mesure que les versions futures s’étendront à davantage de types d’objets et d’environnements variés, des systèmes embarqués similaires pourraient discrètement automatiser d’innombrables tâches simples de prise‑et‑pose, rendant la robotique intelligente accessible à beaucoup plus de personnes et de lieux.
Citation: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
Mots-clés: robotique embarquée, tiny machine learning, contrôle de bras robotique, détection d’objets, automatisation industrielle