Clear Sky Science · fr
Un schéma de commande adaptative neuro-floue et résonante proportionnelle adaptative pour applications de véhicules électriques à MPSM
Trajets électriques plus silencieux et plus fluides
Les voitures électriques sont déjà plus propres que les véhicules à essence, mais la manière dont leurs moteurs sont commandés laisse encore place à l’amélioration. Les à-coups lorsque vous appuyez sur l’accélérateur, le léger bourdonnement du moteur et l’énergie gaspillée proviennent tous de la capacité du moteur à répondre rapidement et en douceur aux conditions changeantes de la route et du trafic. Cet article explore une nouvelle façon de « piloter » le moteur de l’intérieur — en combinant intelligence artificielle et un façonnage de signal particulier — pour permettre aux véhicules électriques d’accélérer plus en douceur, de réduire les pertes d’énergie et de mieux faire face aux perturbations du monde réel.
Pourquoi la commande du moteur compte sur les routes réelles
Les voitures électriques modernes utilisent souvent des moteurs à aimants permanents parce qu’ils sont compacts, efficaces et offrent un couple élevé dès le démarrage. Mais la conduite en ville est capricieuse : on s’arrête et on redémarre aux feux, on se fraye un chemin dans la circulation, et on affronte des côtes et des charges variables. Dans ces conditions, la vitesse du moteur peut dépasser ou rester en retard par rapport à la consigne, et le couple transmis à l’arbre peut présenter des ondulations. Ces ondulations se traduisent par des vibrations, du bruit et un stress supplémentaire sur les engrenages et les roulements. Les circuits de commande traditionnels, réglés de façon fixe, fonctionnent bien uniquement autour d’un petit ensemble de conditions et peuvent peiner lorsque la route, la température ou la charge du véhicule changent.
Mêler apprentissage et règles pour une meilleure commande de vitesse
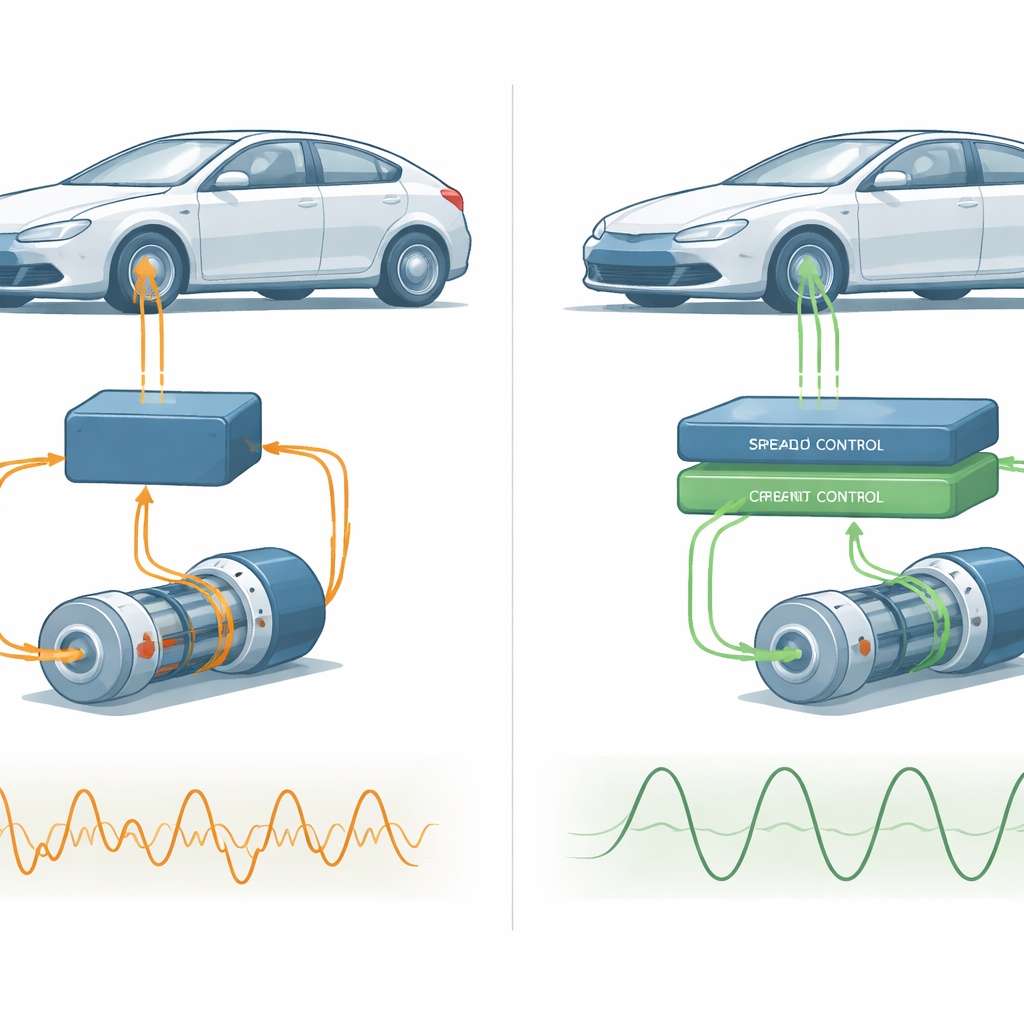
Les auteurs remplacent le bloc externe de commande de vitesse habituel par un système neuro-flou adaptatif — un contrôleur qui combine les règles if–then de la logique floue et la capacité d’apprentissage des réseaux neuronaux. Plutôt que d’être réglé manuellement une fois à l’usine, ce contrôleur apprend à partir d’exemples comment la vitesse du moteur réagit aux commandes et aux perturbations. Il traduit l’erreur de vitesse brute (l’écart entre la vitesse réelle et la consigne) et la vitesse d’évolution de cette erreur en un ensemble « d’opinions » chevauchantes, puis les fusionne en une correction précise. Les résultats d’entraînement et de test montrent que ce contrôleur apprenant trouve rapidement des paramètres qui réduisent les dépassements et les creux, raccourcissent le temps pour atteindre la vitesse cible et maintiennent la stabilité même lorsque le système est non linéaire et soumis à des variations.
Façonner le courant pour un fonctionnement calme et peu bruyant
Tandis que la boucle externe décide de la vitesse à atteindre, la boucle interne détermine l’intensité du courant injecté dans les bobines à chaque instant. Ici, les auteurs introduisent un contrôleur résonant proportionnel adaptatif. Plutôt que de réagir uniquement à l’amplitude de l’erreur, ce contrôleur est conçu pour accorder une attention particulière aux composantes du courant à la fréquence alternative principale du moteur, où les ondulations indésirables sont les plus dommageables. En choisissant soigneusement quelques valeurs de réglage clés, il offre une forte action corrective à cette fréquence fondamentale tout en évitant l’instabilité sur d’autres bandes. Le résultat est un courant qui ressemble presque à une sinusoïde parfaite, avec beaucoup moins de fluctuations brusques qui autrement se traduiraient par des ondulations de couple et un sifflement audible.
Mise à l’épreuve de la nouvelle stratégie
L’équipe évalue leur architecture en deux étages — commande de vitesse neuro-floue en boucle externe et commande de courant résonante en boucle interne — par des simulations informatiques détaillées et des expériences hardware-in-the-loop reproduisant un groupe motopropulseur de véhicule électrique réel. Ils la comparent à trois méthodes établies : un régulateur proportionnel–intégral conventionnel, un schéma associant ce régulateur à une boucle interne résonante, et une approche prédictive basée sur un modèle. Sur une série de scénarios — démarrage depuis l’arrêt, fonctionnement stable sous charge, changements rapides de vitesse à charge constante, et variations soudaines de charge à vitesse constante — le nouveau schéma atteint systématiquement la vitesse cible plus rapidement, avec des pics et des creux plus faibles. Il produit aussi un couple plus régulier et des courants plus propres, même lorsque la résistance et l’inductance du moteur sont modifiées artificiellement pour simuler le chauffage ou des environnements sévères.
Ce que cela signifie pour les voitures électriques de demain
Concrètement, cette stratégie de commande hybride permet au moteur électrique de réfléchir et de s’adapter plutôt que d’exécuter aveuglément une recette fixe. En apprenant à rejeter les perturbations au niveau de la vitesse et en façonnant les formes d’onde de courant à l’intérieur du moteur, l’approche réduit les vibrations, le bruit et les pertes d’énergie. Pour les conducteurs, cela se traduit par des accélérations plus douces, une tenue de route plus stable et des groupes motopropulseurs capables de mieux tolérer le vieillissement des composants et les variations météorologiques. Bien que la méthode suppose encore une fréquence de fonctionnement fixe dans certaines parties, les résultats suggèrent que l’ajout d’intelligence et d’un contrôle sensible à la fréquence aux entraînements moteurs pourrait être une étape clé vers des véhicules électriques plus raffinés, durables et efficients.
Citation: Sangeetha, E., Ramachandran, V.P. A novel adaptive neuro-fuzzy and adaptive proportional resonant control scheme for PMSM based electric vehicle applications. Sci Rep 16, 8023 (2026). https://doi.org/10.1038/s41598-026-35363-2
Mots-clés: moteurs de véhicules électriques, commande neuro-floue, moteur synchrone à aimant permanent, réduction des ondulations de couple, variantes avancées de moteurs