Clear Sky Science · fr
Contrôle en mode glissant flou basé sur l’algorithme super‑twisting pour systèmes descripteurs T‑S
Faire obéir des systèmes complexes
Qu’il s’agisse de gérer des populations de poissons ou de maintenir la stabilité des réseaux électriques et des circuits électroniques, de nombreux systèmes réels se comportent de manière complexe et non linéaire. Les ingénieurs utilisent des algorithmes de contrôle avancés pour garder ces systèmes sûrs et efficaces, même lorsqu’ils sont soumis à des perturbations et à de l’incertitude. Cet article présente une nouvelle stratégie de contrôle qui maîtrise ces systèmes indisciplinés de façon plus douce, en évitant les commutations brutales et rapides susceptibles d’endommager l’équipement et de dégrader les performances.
Pourquoi certains systèmes sont difficiles à contrôler
Beaucoup de systèmes pratiques sont régis non seulement par des équations décrivant l’évolution des grandeurs au fil du temps, mais aussi par des contraintes algébriques qui doivent être satisfaites à chaque instant. Ces systèmes dits descripteurs apparaissent en économie, dans les réseaux électriques, les liaisons mécaniques et les modèles biologiques. Pour traiter leur comportement non linéaire, les chercheurs recourent souvent aux modèles flous de Takagi–Sugeno (T‑S), qui représentent un système complexe comme une combinaison de modèles linéaires plus simples valables dans différentes régions de fonctionnement. Puissant, ce cadre souffre toutefois d’un obstacle technique : la plupart des méthodes de contrôle supposaient à l’avance la connaissance de la variation dans le temps des « fonctions d’appartenance » floues, alors que ces variations dépendent en réalité du comportement futur inconnu du système et de son contrôleur.
Une forme plus douce de contrôle robuste
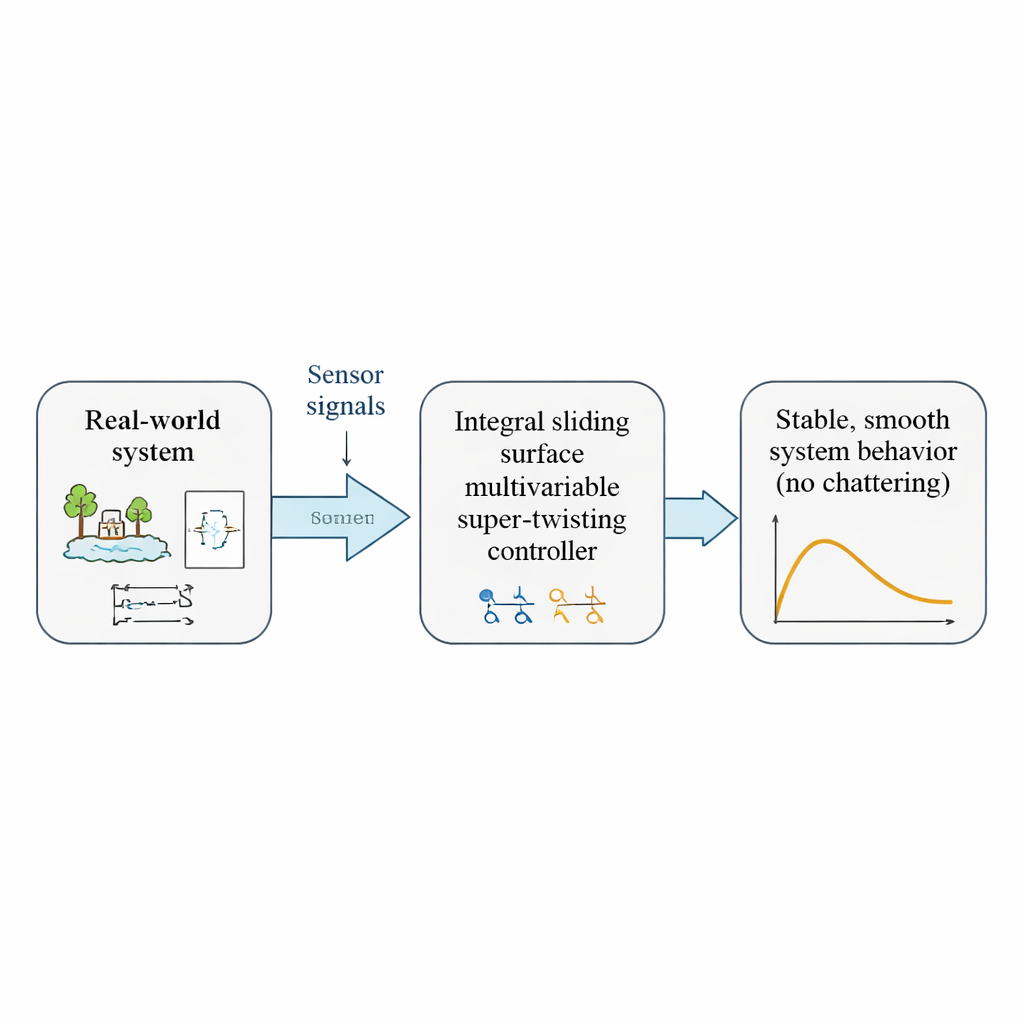
Le contrôle en mode glissant est une méthode robuste reconnue pour sa capacité à contraindre rapidement un système à suivre une trajectoire désirée et à le maintenir malgré les perturbations. Il y parvient en commutant l’entrée de commande de façon à compenser l’incertitude. Cependant, ces commutations rapides peuvent provoquer du « chattering » — des oscillations à haute fréquence indésirables, voire nuisibles dans les systèmes mécaniques et électriques. L’algorithme super‑twisting, une forme avancée du contrôle en mode glissant, dissimule ces commutations au sein d’un processus interne, produisant un signal de commande continu qui conserve la robustesse tout en réduisant le chattering. Jusqu’à présent, cette technique était surtout limitée aux systèmes à entrée unique ou nécessitait de décomposer les systèmes multi‑entrées en de nombreux contrôleurs séparés, ce qui est coûteux en calcul.
Une nouvelle surface de glissement sans hypothèses cachées
La première contribution majeure des auteurs est une nouvelle sorte de surface de glissement « intégrale » conçue spécifiquement pour les systèmes flous T‑S descripteurs. En termes simples, cette surface est une condition mathématique impliquant à la fois le comportement présent et l’accumulation du passé du système. En la construisant astucieusement, les auteurs montrent qu’ils peuvent garantir le mouvement souhaité une fois le système sur cette surface, sans nécessiter de bornes préalables sur la façon dont les fonctions d’appartenance floues varient. Cela supprime une hypothèse restrictive qui limitait les méthodes antérieures. L’analyse utilise des fonctions de type énergie judicieusement choisies pour démontrer que le comportement du système sur la surface de glissement reste stable au fil du temps.
Un contrôleur super‑twisting multivariable
À partir de cette surface de glissement, l’article développe une version multivariable de l’algorithme super‑twisting. Plutôt que de concevoir un contrôleur par entrée ou par variable de glissement, la méthode traite l’ensemble en forme matricielle. Cela la rend mieux adaptée aux systèmes où les états sont fortement couplés, comme des espèces interagissant dans un écosystème ou des courants et tensions dans un circuit. Les auteurs dérivent des conditions pour choisir les gains du contrôleur de sorte que les états du système atteignent immédiatement la surface de glissement puis convergent en temps fini. Parce que le signal de commande est continu plutôt que commuté brutalement, le chattering est réduit par conception, tout en conservant la robustesse aux perturbations.
Prouver l’idée en biologie et en électronique
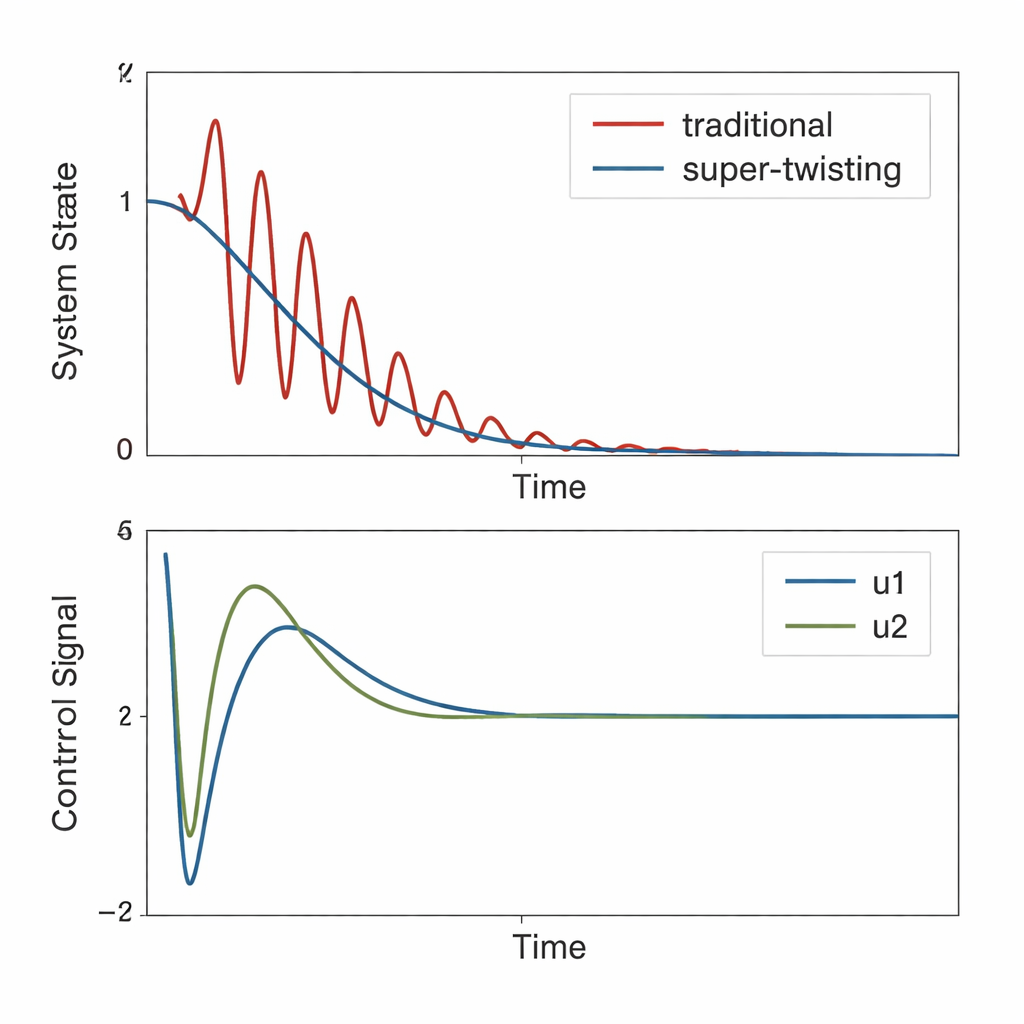
Pour démontrer la faisabilité de leur méthode, les auteurs l’appliquent à deux systèmes descripteurs non linéaires différents. Le premier modélise un scénario bio‑économique impliquant des populations immatures et matures d’une espèce, ainsi qu’une variable capturant la capacité reproductive et des actions de gestion comme la pêche et la régulation. Le second exemple est un circuit à diode tunnel non linéaire, un banc d’essai classique en électronique. Dans les deux cas, les simulations montrent que le contrôleur proposé stabilise rapidement les états du système et maintient les variables de glissement proches de zéro, indiquant un suivi précis du comportement désiré. Comparée aux contrôleurs classiques en mode glissant, la nouvelle approche réduit significativement les oscillations de la réponse du système et des signaux de commande.
Ce que cela signifie en pratique
Pour les non‑spécialistes, le message principal est que ce travail offre une manière de maintenir sous contrôle des systèmes complexes, contraints et incertains sans les commutations violentes qui ont affecté certaines méthodes robustes. En combinant la modélisation floue, une surface de glissement intégrale et un algorithme super‑twisting multivariable, les auteurs conçoivent des contrôleurs à la fois garantis mathématiquement stables et plus doux en fonctionnement. Cela pourrait bénéficier à des applications allant de la gestion des ressources écologiques à l’électronique de puissance avancée et aux systèmes de contrôle en réseau, en particulier à mesure que des travaux ultérieurs étendront ces idées à des environnements cybersécurisés où la communication peut être perturbée par des attaques.
Citation: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Mots-clés: contrôle en mode glissant, systèmes flous, contrôle robuste, dynamique non linéaire, algorithme super‑twisting