Clear Sky Science · fr
Contrôleur adaptatif de référence robuste pour manipulateur planaire 3-DDL
Des bras robotiques plus intelligents pour des tâches plus exigeantes
Les bras robotiques d’usine sont extrêmement rapides et précis, mais leurs performances peuvent chuter quand le monde réel ne se comporte pas comme prévu — charges qui changent, pièces légèrement mal positionnées ou forces inattendues qui secouent le bras. Cet article explore une nouvelle façon de maintenir la précision et la stabilité d’un bras robotique courant à trois articulations, même lorsque son comportement est difficile à modéliser exactement et que de fortes perturbations sont présentes, rendant les robots des partenaires plus fiables sur la chaîne de production.
Pourquoi trois articulations comptent en milieu industriel
L’étude se concentre sur un robot planaire à trois maillons : trois segments rigides reliés par des articulations rotatives et se déplaçant dans un plan. Malgré sa simplicité, cette configuration est le socle de nombreuses tâches industrielles de préhension/dépose, des lignes d’emballage et des systèmes d’assemblage. Le défi tient au fait que le mouvement d’une articulation affecte fortement les autres, et que les équations décrivant la dynamique du bras sont hautement non linéaires et fortement couplées. Les régulateurs classiques peuvent bien marcher lorsque tout est connu et prévisible, mais peinent quand la charge utile change, que la friction ou la masse sont mal modélisées, ou que des perturbations externes dévient le bras de sa trajectoire.
Décomposer un mouvement complexe en morceaux plus simples
Pour maîtriser cette complexité, les auteurs dérivent d’abord un modèle mathématique détaillé du mouvement du robot, incluant la manière dont les masses des maillons, les angles d’articulation et la gravité se combinent pour produire le mouvement. Ils introduisent ensuite une simplification clé : une stratégie de « découplage ». Plutôt que de traiter le robot comme un système tridimensionnel fortement imbriqué, chaque articulation est modélisée comme si son accélération dépendait principalement de son propre couple moteur et de sa vitesse. Les effets résiduels — interactions entre articulations, termes de gravité et autres influences difficiles à modéliser — sont regroupés et traités comme des incertitudes. Ce découplage permet de scinder le problème de commande en trois sous-systèmes plus petits et plus faciles à gérer, un par articulation, tout en reconnaissant que le système réel reste complexe en dessous. 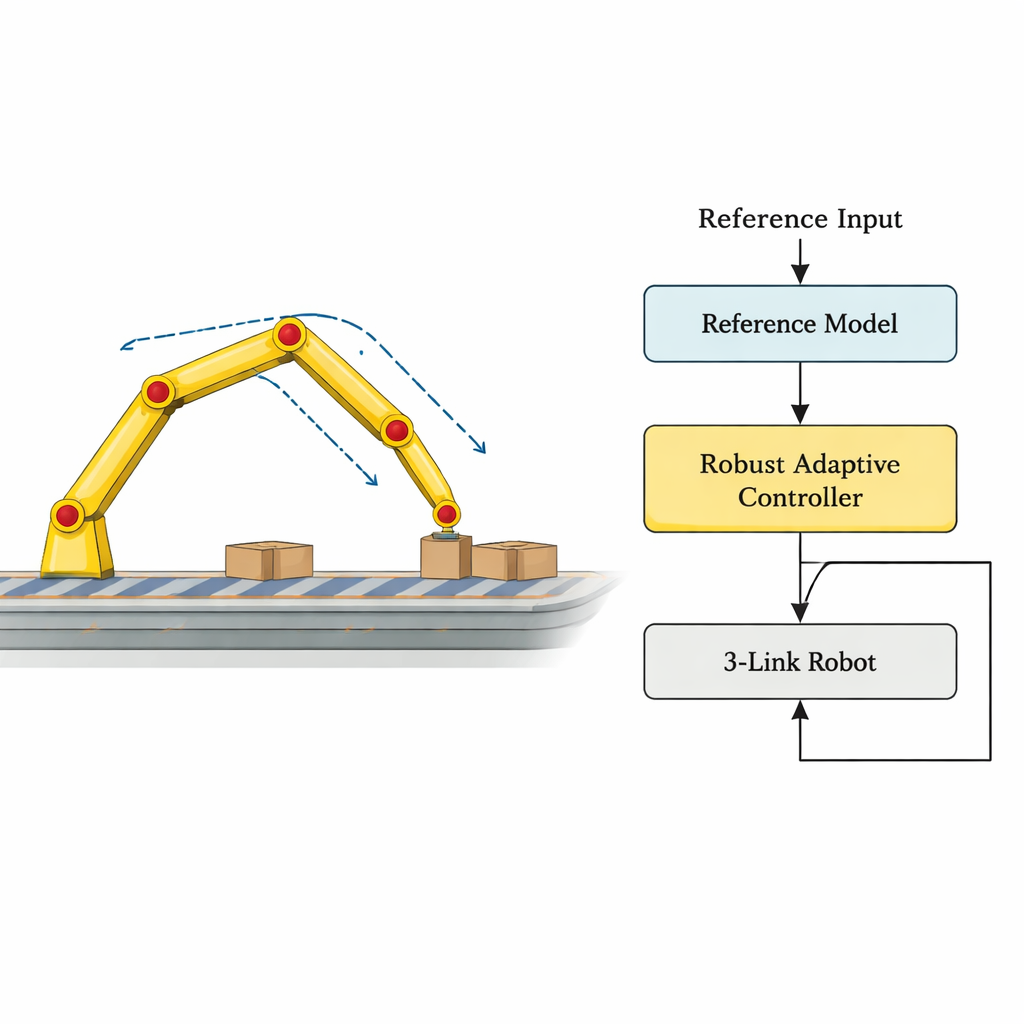
Apprendre au robot à suivre une cible en mouvement
Sur ce modèle simplifié, les auteurs conçoivent un contrôleur adaptatif de référence (MRAC). Concrètement, ils définissent d’abord une réponse idéale — un modèle de référence qui spécifie comment chaque articulation devrait se déplacer dans le temps en réponse à une consigne. Le contrôleur compare en continu le mouvement réel du robot à cet idéal et ajuste ses gains internes en temps réel pour réduire l’écart. En conditions parfaites, un MRAC classique peut amener le robot à suivre de près la référence, mais il présente une faiblesse importante : en présence de perturbations persistantes ou d’erreurs de modélisation, les gains adaptatifs peuvent dériver vers des valeurs extrêmes, entraînant oscillations, gaspillage d’énergie et même perte de stabilité. Ce phénomène, appelé dérive des paramètres, rend le MRAC simple risqué pour un usage industriel réel.
Rendre l’adaptation robuste, pas imprudente
Pour éviter cette dérive, l’article développe plusieurs variantes « robustes » du MRAC qui prennent explicitement en compte les effets inconnus. Les auteurs ajoutent des termes supplémentaires aux lois d’adaptation qui ramènent doucement les gains du contrôleur vers des limites sûres ou modulant l’effort d’adaptation en fonction de l’amplitude de l’erreur de suivi. Parmi les stratégies testées — connues sous les noms de sigma-modification, error-modification et une modification optimale sensible à l’énergie — c’est cette dernière qui se distingue. À travers des simulations numériques étendues, incluant des trajectoires oscillatoires rapides, des mouvements de préhension/dépose, des variations de masse de 50 %, des ajouts de charge subits et de fortes perturbations haute fréquence, le MRAC robuste maintient l’erreur de suivi réduite et les signaux de commande lisses. Dans des scénarios où les gains internes du MRAC classique croissent sans limite, les versions robustes les gardent maîtrisés et le mouvement du bras stable. 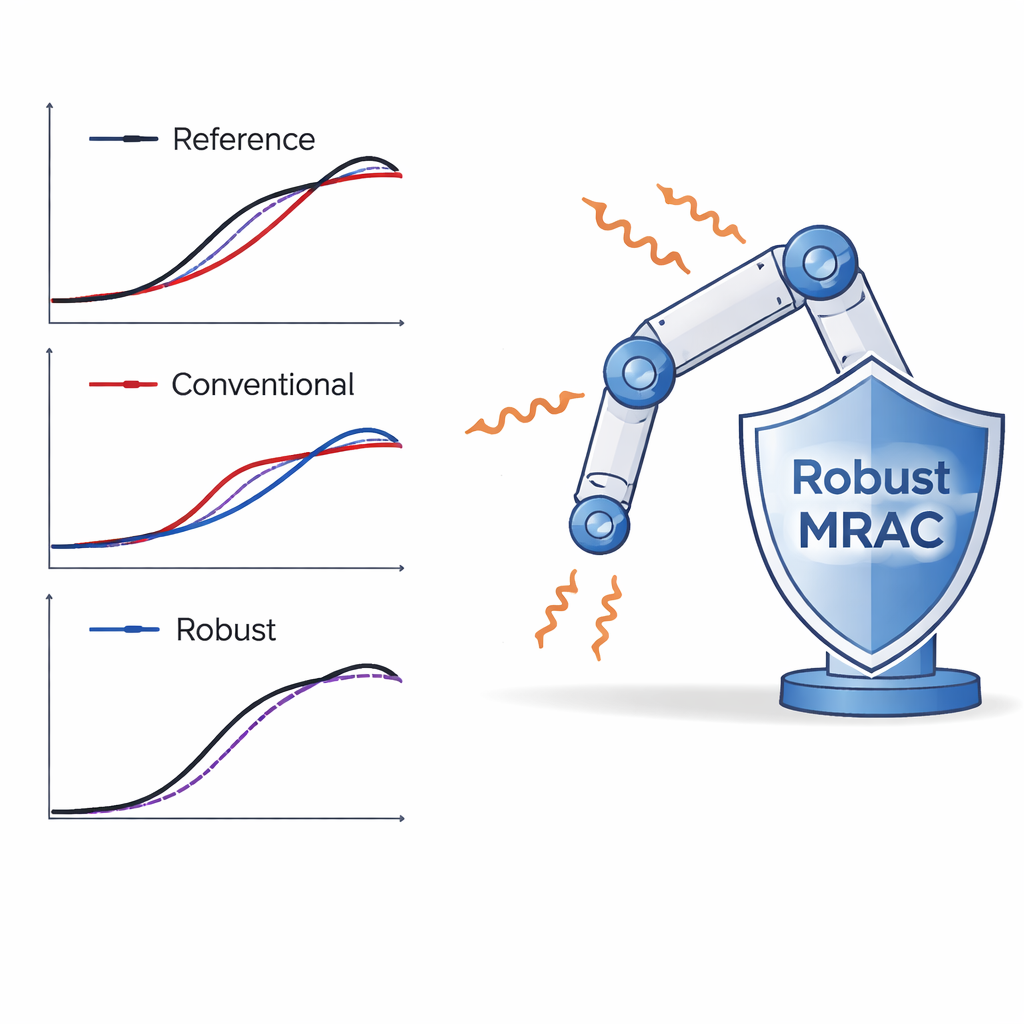
Ce que cela signifie pour les robots du monde réel
Pour un lecteur non spécialiste, la conclusion est que ce travail propose un « pilote automatique » plus intelligent pour les bras robotiques industriels — un système qui continue d’apprendre et de s’adapter sans devenir instable lorsque l’environnement ou la charge change. En scindant la dynamique complexe à trois articulations en parties plus simples et en ajoutant des garde-fous au processus d’apprentissage, le contrôleur adaptatif robuste proposé permet au robot de suivre fidèlement les trajectoires souhaitées tout en utilisant un effort moteur raisonnable, même face à des perturbations et des incertitudes. Cela rapproche la robotique pratique de systèmes véritablement plug-and-play, pouvant être reconfigurés rapidement, gérer des conditions inattendues et fonctionner en sécurité aux côtés des humains sans réajustements constants par des experts.
Citation: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Mots-clés: pilotage de manipulateur robotique, commande adaptative, robotique industrielle, suivi de trajectoire, commande robuste