Clear Sky Science · fr
Un algorithme intelligent, bio-inspiré, multi‑objectif et évolutif d’assistance par UAV pour le regroupement dans les réseaux ad hoc volants
Des essaims de drones plus intelligents dans le ciel
Imaginez des flottes de drones travaillant de concert pour rechercher des survivants après un tremblement de terre, surveiller des incendies de forêt ou contrôler des cultures. Pour bien faire cela, des centaines de robots volants doivent communiquer rapidement sans vider leurs batteries. Cet article explore comment organiser ces « essaims de drones » pour qu’ils restent connectés, réagissent vite et tiennent plus longtemps en vol en empruntant des idées à une source inattendue : le comportement de chasse de l’oiseau secrétaire.
Pourquoi les réseaux volants sont difficiles à maîtriser
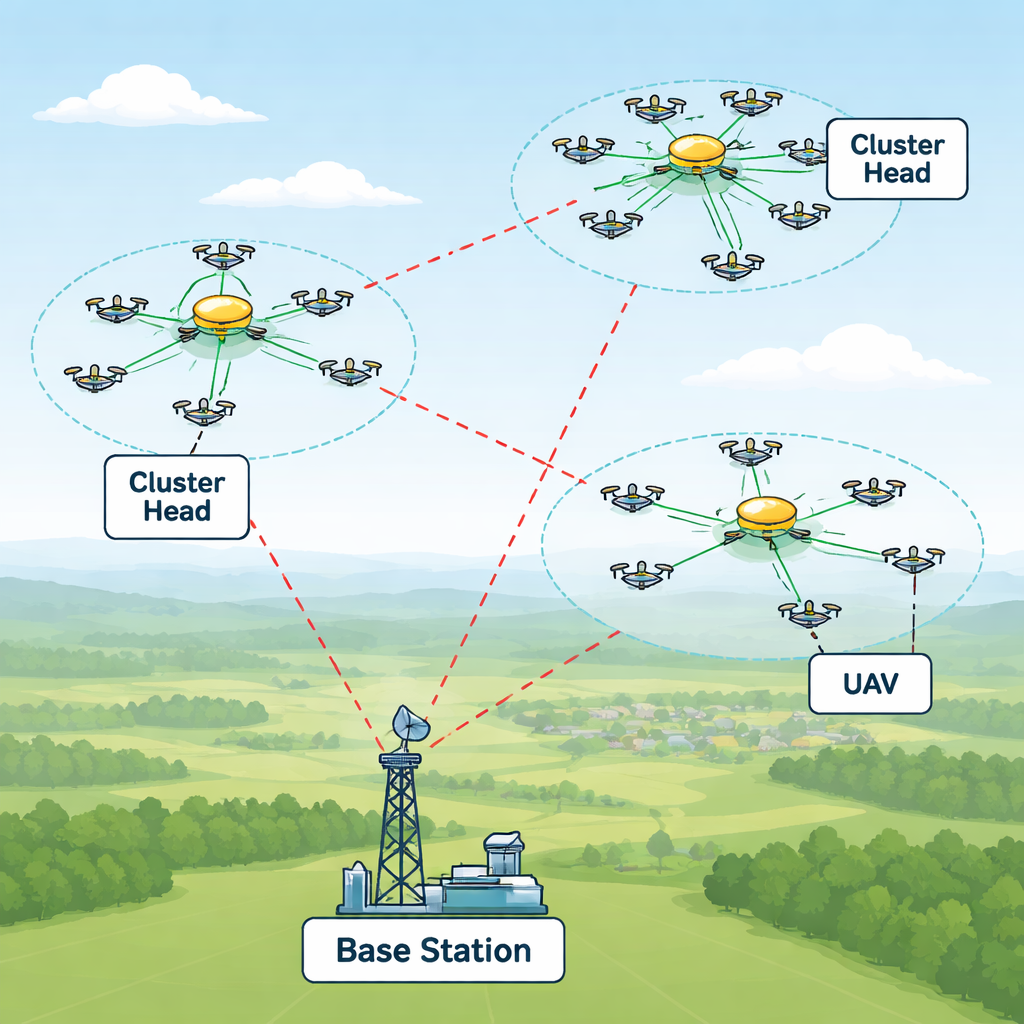
Les drones modernes peuvent former ce que les ingénieurs appellent des Flying Ad Hoc Networks, ou FANETs — des toiles sans fil qui n’existent que dans le ciel. Contrairement aux réseaux terrestres, ces drones se déplacent en trois dimensions, changent rapidement de direction et dépendent d’une énergie limitée. Si chaque drone essayait de parler directement à tous les autres, les signaux se heurteraient, les délais augmenteraient et les batteries s’épuiseraient vite. Une solution répandue consiste à former des grappes : de petits groupes de drones dirigés par une « tête de cluster » qui coordonne les messages locaux et communique avec les autres têtes. Mais choisir quels drones doivent devenir leaders, et quand reshuffler ces rôles au fur et à mesure que l’essaim se déplace, est un casse‑tête en constante évolution.
Emprunter des astuces à un oiseau prédateur
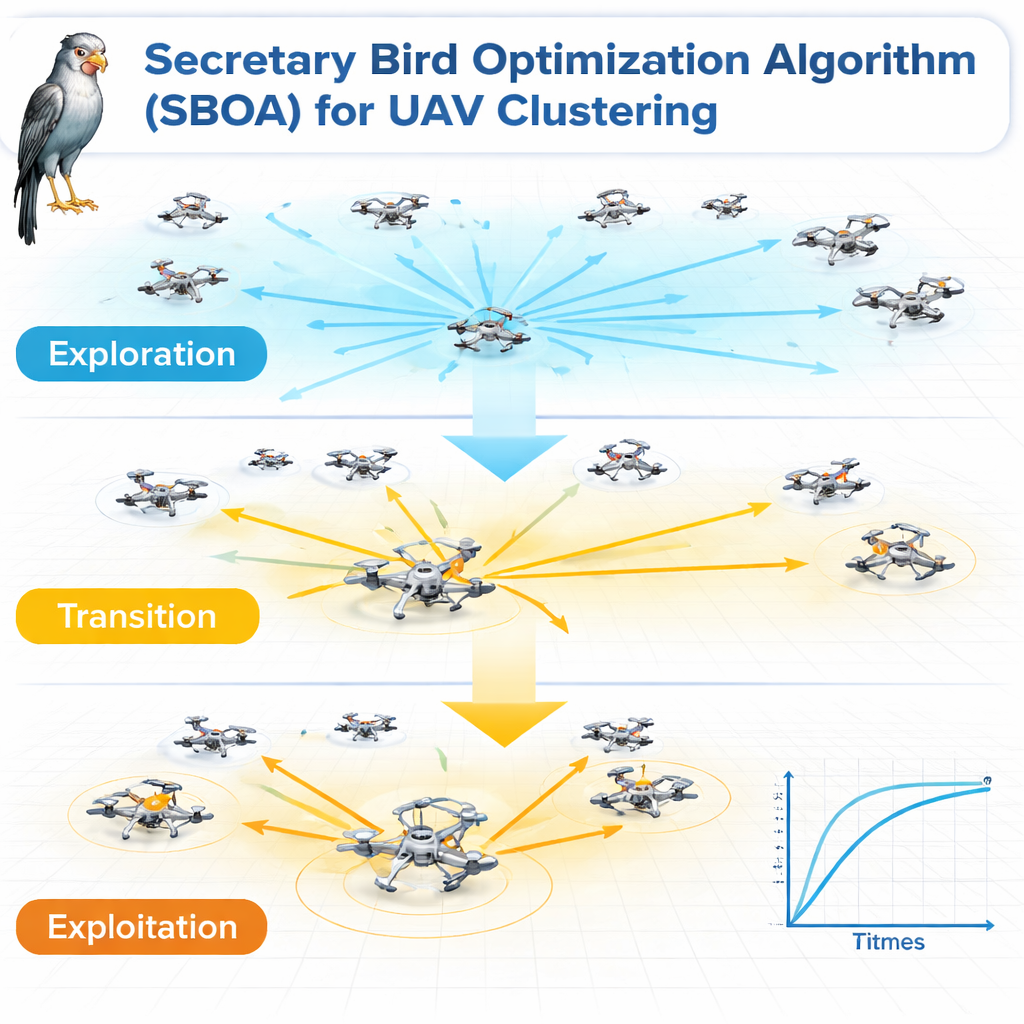
Les auteurs se tournent vers une idée bio‑inspirée appelée l’algorithme d’optimisation du secrétaire (Secretary Bird Optimization Algorithm, SBOA). Les oiseaux secrétaires sont connus pour balayer de larges zones, puis se rapprocher et frapper leur proie avec des coups de pied précis. Le SBOA reproduit ce schéma en logiciel. Il commence par explorer de nombreuses façons possibles d’attribuer des têtes de cluster au sein de l’essaim, puis se concentre progressivement sur les options les plus prometteuses. À chaque étape, il pose trois questions : les drones à l’intérieur de chaque cluster sont‑ils suffisamment proches ? Les leaders choisis ont‑ils encore assez de batterie ? Et la charge de travail est‑elle partagée équitablement afin qu’aucun leader ne soit surchargé tandis que d’autres restent inactifs ? En traitant cela comme un problème multi‑objectif, l’algorithme équilibre la distance, l’énergie et l’équité simultanément.
Tester les essaims de drones dans des mondes virtuels
Pour vérifier si cette stratégie inspirée de l’oiseau aide, l’équipe a construit des simulations informatiques détaillées. Ils ont lâché entre 30 et 160 drones dans des espaces virtuels 3D de tailles différentes, d’un kilomètre carré jusqu’à un vaste boîtier de 15 × 15 kilomètres, et les ont laissés voler selon un modèle de mobilité simple. La portée de communication a été variée de 100 à 900 mètres. Pour chaque scénario, le SBOA s’est confronté à trois alternatives avancées qui imitent elles aussi des comportements naturels : Fire Hawk Optimization (FHOA), Portia Spider Optimization (PSOA) et une méthode multi‑objectif inspirée de la fécondation des spermatozoïdes (MOSFP). Les chercheurs ont suivi le nombre de clusters formés, la rapidité d’émergence d’une structure stable, l’équité dans le partage des tâches des leaders et la « fitness » des solutions, combinant distance, consommation d’énergie et équilibre en un seul score.
Ce que les simulations ont révélé
Dans presque tous les tests, le SBOA est arrivé en tête. Il a régulièrement atteint jusqu’à 15 % de fitness en plus que ses rivaux, avec environ 10 % de clustering plus efficace et approximativement 40 % d’amélioration dans l’équilibre de charge entre les leaders. Dans les expériences temporelles, l’approche inspirée de l’oiseau secrétaire a atteint un schéma de clusters stable en moins de trames de simulation, notamment à mesure que le nombre de drones augmentait. Même dans des zones 3D vastes et peu denses où les drones sont éloignés, le SBOA conservait plus de 85 % de la fitness maximale atteignable, indiquant qu’il peut s’adapter aussi bien aux essaims denses qu’aux formations dispersées. Des outils visuels tels que des surfaces, des cartes t‑SNE et des diagrammes en violon ont confirmé que le SBOA produisait des clusters plus serrés et plus distincts avec moins de variation dans la charge des leaders que les autres méthodes.
De la simulation aux missions réelles
L’étude conclut qu’une stratégie inspirée de l’oiseau secrétaire offre une recette solide pour gérer des essaims de drones : elle maintient les drones groupés efficacement, répartit le travail de manière équitable entre les leaders et réagit en douceur aux changements de conditions. Pour un lecteur non spécialiste, cela signifie que les flottes futures de drones de secours, agricoles ou de surveillance pourraient rester connectées plus longtemps, gaspiller moins de batterie et répondre de façon plus fiable, simplement en s’organisant mieux. Les auteurs notent que des facteurs réels — comme les rafales de vent, les erreurs GPS et les interférences radio — doivent encore être testés, et ils proposent d’ajouter la prédiction de mouvement basée sur l’apprentissage et un routage plus intelligent. Mais comme étape vers des réseaux aéroportés robustes, le SBOA montre que l’observation de la manière dont la nature chasse dans la savane peut aider à rendre nos assistants robotiques beaucoup plus performants dans le ciel.
Citation: Aslam, Z., Rahman, T., Husnain, G. et al. An intelligent bio-inspired multi-objective and scalable UAV-assisted clustering algorithm in flying ad hoc networks. Sci Rep 16, 4870 (2026). https://doi.org/10.1038/s41598-026-35196-z
Mots-clés: essaims de drones, communication sans fil, algorithmes bio‑inspirés, mise en réseau économe en énergie, réseaux ad hoc volants